![]()


ultimo aggiornamento 6 gennaio 2013
|
ultimo aggiornamento 6 gennaio 2013 |
|
|
|
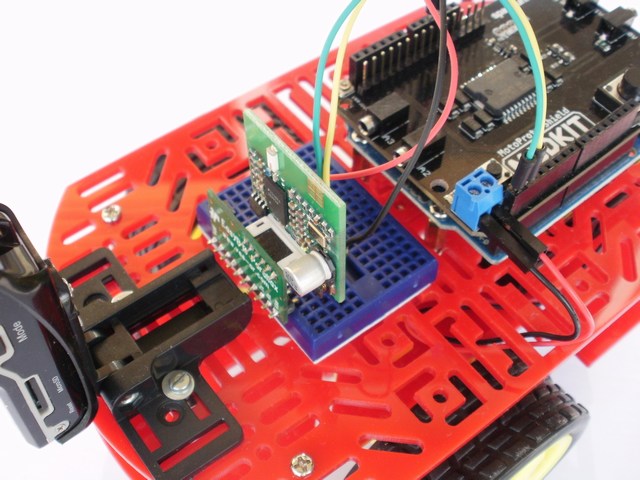
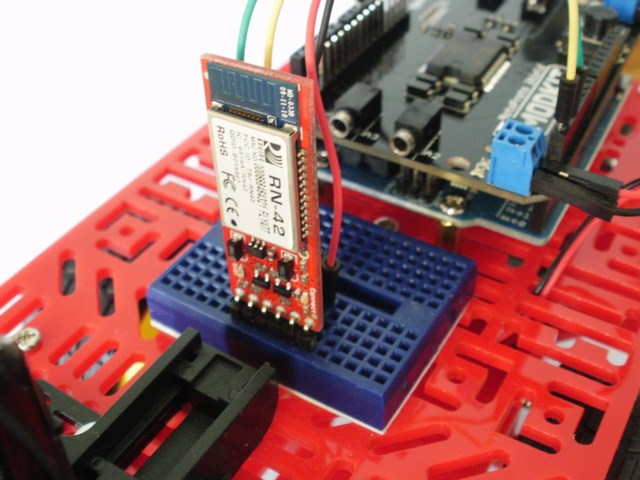
La
prima versione del
robot
Magic BOT prevedeva
l'utilizzo per il comando da remoto l'utilizzo del
modulo
Easy Bluetooth
venduto dalla
PARALLAX
è realizzato dalla RoboTech srl
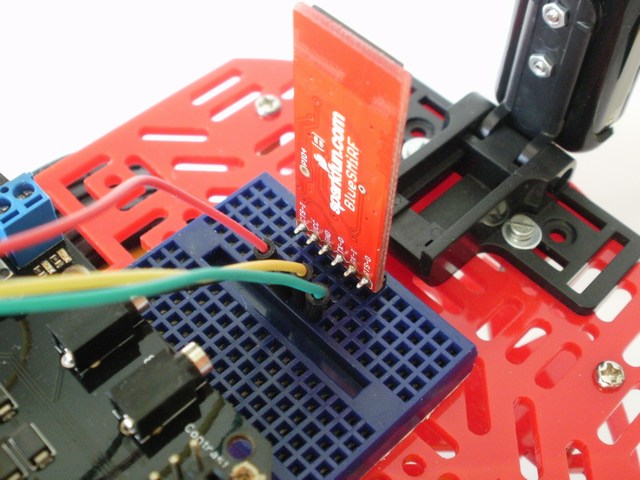
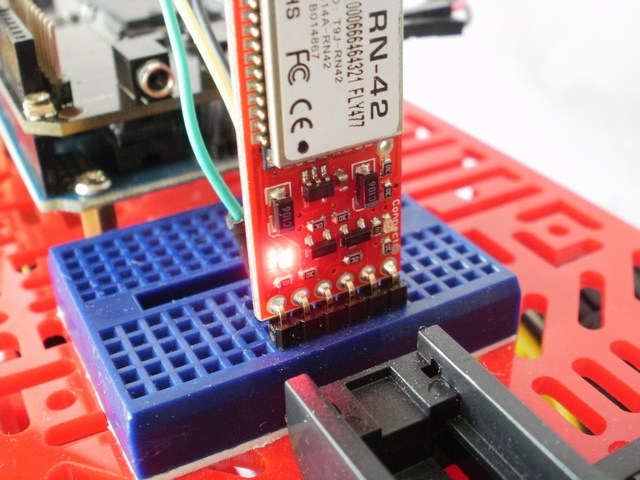
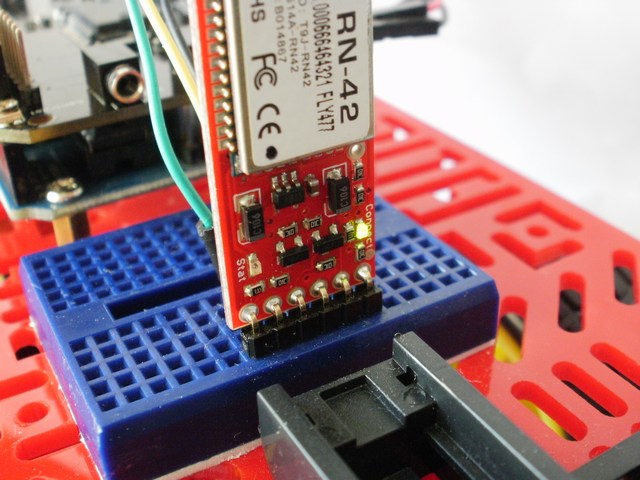
Questo può però
essere sostituito con altri modelli in commercio come il
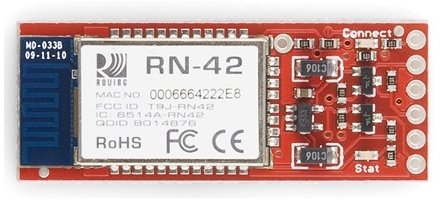
modulo BlueSMiRF Silver è un modem
wireless Bluetooth prodotto dalla
SparkFun, basato sull'integrato
BlueSMiRF-42
RN, e può sostituire un collegamento
di tipo seriale mediante cavo
 |
 |
|
|

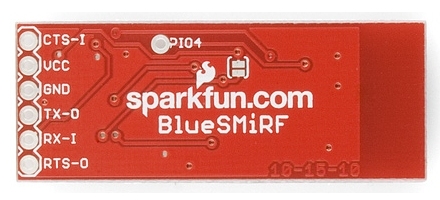
Caratteristiche del modulo BlueSMiRF Silver
• Approvazione FCC Classe 2
Bluetooth Modem Radio
• Piccole dimensioni - 51.5x15.8x5.6mm
• Collegamento molto robusto sia in integrità che come distanza di trasmissione
(18m)
• Hardy frequency hopping scheme - opera in ambienti RF come il Wi-Fi, 802.11g,
e Zigbee
• Connessione crittografata
• Frequenza: 2.4 ~ 2,524 GHz
• Tensione di funzionamento: 3.3V-6V
• Comunicazione seriale: 2400-115200 bps
• Temperatura di funzionamento: -40 ~ +70 C
• Antenna integrata
|
|
|
|
|
|
La modifica prevede solamente una piccola modifica al programma che è quella della velocità di collegamento che da 9600 dovrà essere portata a 115200
Serial.begin(115200); //imposta la porta di comunicazione con il modulo
/* MagicBOT.ino Il programma permette il test della parte controllo motore. Vengono utilizzati i seguenti pin Pin +5V -> Alimentazione logica Pin GND -> Alimentazione Pin Vin -> Alimentazione motori Pin 0 -> RX Modulo Bluetooth Pin 1 -> TX Modulo Bluetooth Pin 2 -> Direzione Motore A Pin 3 -> PWM - Velocità Motore A Pin 4 -> Direzione Motore B Pin 5 -> PWM - Velocità Motore B Ultima modifica il 5/1/2013 da Adriano Gandolfo <https://www.adrirobot.it> This example code is in the public domain. */ int M1_PWM = 3; //PWM controllo velocità per motore 1 - pin digitale 3 int M2_PWM = 5; //PWM controllo velocità per motore 2 - pin digitale 3 int M1 = 2; //Controllo direzione per motore 1 - pin digitale 2 int M2 = 4; //Controllo direzione per motore 2 - pin digitale 4 void setup() { Serial.begin(115200); //imposta la porta di comunicazione con il modulo pinMode(M1_PWM, OUTPUT); //Imposta i pin come uscite pinMode(M2_PWM, OUTPUT); pinMode(M1, OUTPUT); pinMode(M2, OUTPUT); // ferma per default entambi i motori digitalWrite(M1_PWM, LOW); //Disabilita il comando del motore digitalWrite(M2_PWM, LOW); delay(500); } void loop(void) { while (Serial.available() < 1) { } // Attesa sino a quando riceve un carattere char val = Serial.read(); // Legge il carattere dal modulo Bluetooth e lo salva nella variabile val switch(val) // Eseguie i comandi in base al carattere ricevuto { case '8':// Se il carattere ricevuto è '8' esegue la routine Robot avanti robot_avanti (); break; case '2'://Se il carattere ricevuto è '2' esegue la routine Robot indietro robot_indietro (); break; case '4'://Se il carattere ricevuto è '4' esegue la routine Robot sinistra robot_sinistra (); break; case '6'://Se il carattere ricevuto è '6' esegue la routine Robot destra robot_destra (); break; case '0'://Se il carattere ricevuto è '0' esegue la routine Robot fermo stop(); break; default: stop(); // Ferma il robot break; } } void stop(void) //Robot fermo { digitalWrite(M1_PWM, LOW); //Disabilita il comando del motore digitalWrite(M2_PWM, LOW); } void robot_indietro() { digitalWrite(M1, LOW); analogWrite(M1_PWM, 255); digitalWrite(M2, HIGH); analogWrite(M2_PWM, 255); } void robot_avanti () { digitalWrite(M1, HIGH); analogWrite(M1_PWM, 255); digitalWrite(M2, LOW); analogWrite(M2_PWM, 255); } void robot_destra () { digitalWrite(M1, LOW); analogWrite(M1_PWM, 255); digitalWrite(M2, LOW); analogWrite(M2_PWM, 255); } void robot_sinistra () { digitalWrite(M1, HIGH); analogWrite(M1_PWM, 255); digitalWrite(M2, HIGH); analogWrite(M2_PWM, 255); } |
| Elenco revisioni: | |
| 06/01/2013 | Emissione preliminare |