Modulo di potenza
ultimo aggiornamento 22 ottobre 2016
|
|
Modulo di potenza ultimo aggiornamento 22 ottobre 2016 |
|
|
|
|
Il modulo di potenza del
robot Monty
permette il pilotaggio dei motori principali del robot tramite dei
transistor di potenza collegati a formare un ponte H (vedere schema).
Le morsettiere presenti sullo stampato permettono inoltre il collegamento
con i vari sensori, quali:
sensori a riflessione (tipo
CNY70), finecorsa.
|
|












Schema elettrico della scheda di potenza
|
||||||||||||||||||||||||||||||||||||||||
| Diodo 1N4007 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
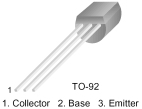
| Transistor BC547 (NPN Switching and Applications) | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
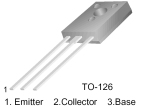
| Transistor BD135 (NPN Medium Power Linear and Switching Applications) | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
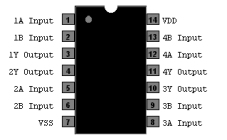
| HEF 40106 Sei porte Schmitt trigger invertenti | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| CD 4011 Quad 2-Input NAND Buffered B Series Gate | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
|
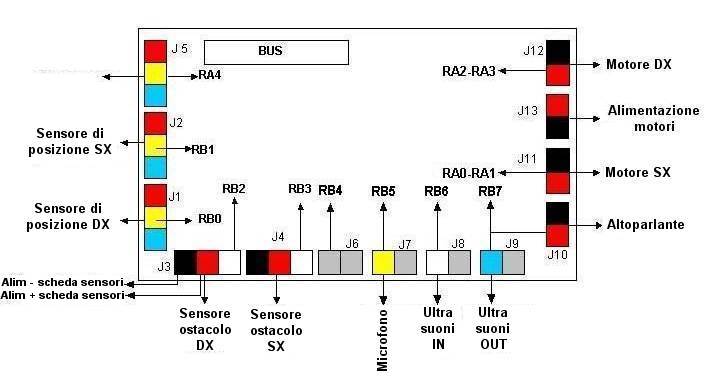
Corrispondenza tra morsettiera e funzione
|
Corrispondenza tra porta del PIC16F84 e funzione
|
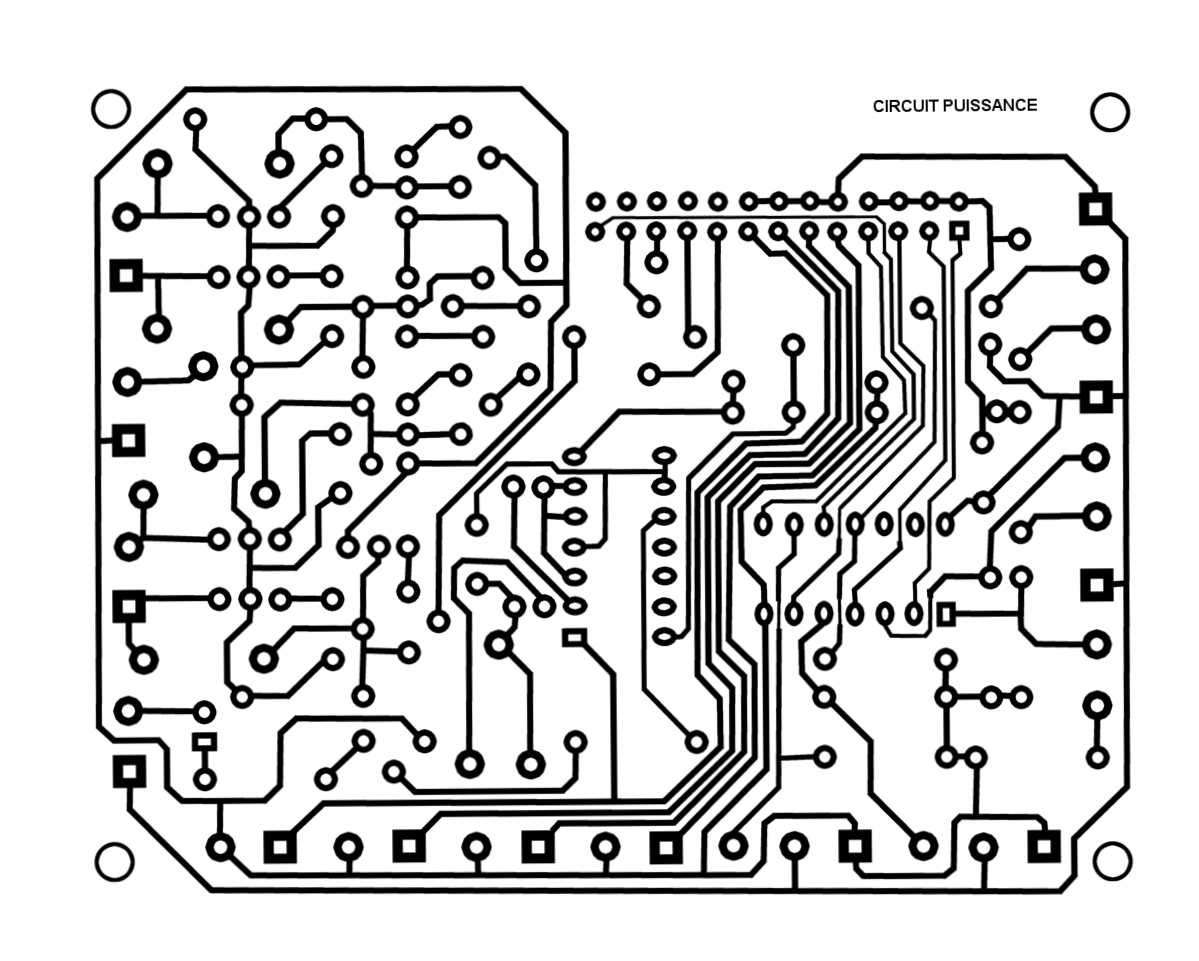
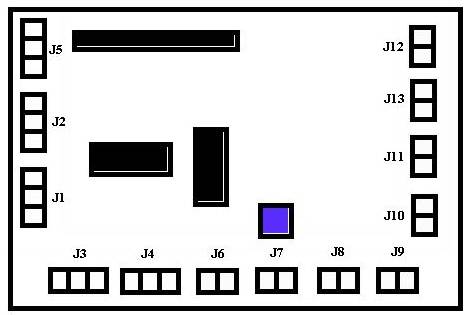
Posizionamento e numerazione morsettiere
Schema di collegamento della scheda di potenza
| Elenco revisioni: | |
| 22/10/2016 | Aggiornato pagina |
| 21/06/2012 | Aggiornato pagina |
| 07/07/2008 | Inserito schede componenti, disegno circuito stampato |
| 03/11/2006 | Aggiornato pagina |
| 25/05/2006 | Inserito caratteristiche integrati CD40106, CD4011 |
| 26/04/2006 | Inserito PDF istruzioni di montaggio |
| 18/12/2005 | Revisione pagina, aggiunta caratteristiche sensore CNY70 |
| 02/04/2004 | Revisione pagina |