
ultimo aggiornamento 28 giugno 2020
|
|
ultimo aggiornamento 28 giugno 2020 |
|
|
|
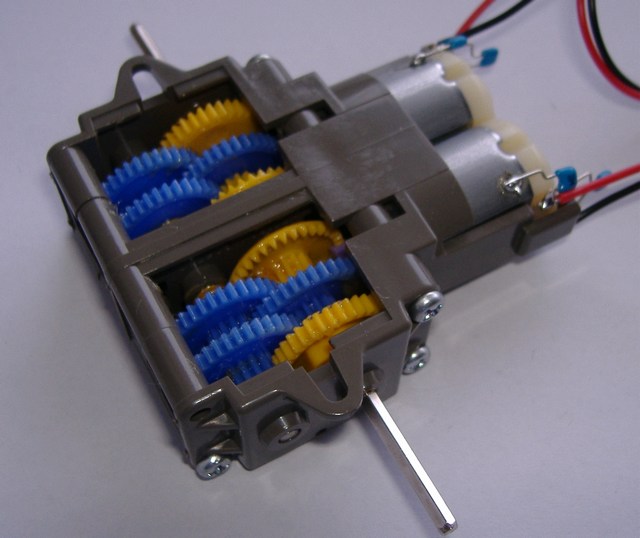
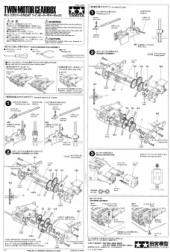
Il gruppo motore è formato dal doppio motoriduttore
Tamiya
70168 è un'unità compatta con due motori e trasmissioni indipendenti. Il kit
include due motori e tutti gli ingranaggi e le parti per costruire una delle
quattro possibili configurazioni del rapporto di trasmissione (12.7: 1, 38: 1,
115: 1 e 344: 1). Sebbene non sia tipico, è possibile assemblare ciascun lato
con rapporti di trasmissione diversi.
Esistono due posizioni dell'asse di uscita possibili (per ogni dato rapporto di
trasmissione, è possibile solo una posizione dell'uscita). L'asse esagonale da
3 mm è compatibile con tutti e quattro i tipi di ruota della Tamiya.


Montaggio del riduttore

Scatola contenete il materiale

Contenuto della scatola

Tipologia ingranaggi

Premontaggio degli alberi

Montaggio della prima sezione

Assemblaggio completato

Motori completi di pignone

Componenti per collegamento motori

Motori montati

Dettaglio condensatori
Condensatori antidisturbo
A lato è visibile
lo schema di collegamento dei condensatori utilizzati come
filtri antidisturbo.
Essi servono a sopprimere i disturbi causati dallo scintillio
del motore elettrico, infatti lo sfregamento delle spazzole sul
collettore può causare interferenze con la circuiteria
elettronica.
Per questo occorre saldare tre condensatori ceramici(o meglio
poliestere) da 100nF uno tra positivo e carcassa, uno tra
negativo e carcassa e uno tra positivo e negativo.

Dettaglio
condensatori sui motori
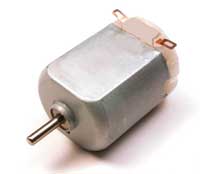
Motore elettrico
![]()
|
||||||||||||||||
Il motore elettrico in corrente continua (tratto da wikipedia)
Il motore in corrente
continua (brevemente motore in CC) è stato il primo motore elettrico
realizzato, ed è tuttora utilizzato ampiamente per piccole e grandi
potenze, inoltre tale motore può funzionare da dinamo.
Sono a corrente continua (o comunque alimentabili in corrente continua)
numerosi motori di piccola potenza per usi domestici, come anche motori
per trazione ferroviaria e marina della potenza di molte centinaia di kW.
Motore a spazzole
Il classico motore in corrente continua ha una parte che gira detta
appunto rotore o anche armatura e una parte che genera un campo
magnetico fisso (nell'esempio i due magneti colorati) detta statore.
Un interruttore rotante detto commutatore o collettore a spazzole
inverte due volte ad ogni giro la direzione della corrente elettrica che
percorre i due avvolgimenti generando un campo magnetico che entra ed
esce dalle parti arrotondate dell'armatura.
Nascono forze di attrazione e repulsione con i magneti permanenti fissi
(indicati con N ed S nelle figure).
La velocità di rotazione dipende da:
Tensione applicata.
Corrente assorbita dal rotore.
Carico applicato.
La coppia generata è proporzionale alla
corrente. Il controllo più semplice agisce sulla tensione di
alimentazione. Nei sistemi più complessi si usa un Controllo automatico
in retroazione che legge le variabili per generare la tensione da
applicare al motore. Il motore CC a magneti permanenti ha un
comportamento reversibile: diventa un generatore di corrente continua se
si collega un altro motore all'albero. Si può allora prelevare l'energia
elettrica prodotta collegandosi alle spazzole.
Il suo limite principale è nella necessità del commutatore a spazzole:
Le spazzole sono in grafite, mentre nei piccoli servomotori e nei tipi utilizzati nei lettori CD/DVD o registratori a cassette sono in lega metallica bianca. La differenza è nella frequenza della loro sostituzione, infatti nelle macchine utensili come smerigliatrici o trapani, si utilizzano spazzole in grafite, perché è molto semplice e veloce sostituirle, le spazzole in metallo, sono usate su apparecchi dove risulta scomodo o non conveniente cambiarle, come nei motori d'avviamento dei mezzi di trasporto.
Le spazzole pongono un limite alla massima velocità di rotazione: maggiore è la velocità e più forte è la pressione che bisogna esercitare su di esse per mantenere un buon contatto, comunque i motori usati negli aspirapolvere e negli elettroutensili portatili (trapani, mole, ect.) possono raggiungere i 35000-45000 giri al minuto.
Tra spazzole e collettore, nei momenti di commutazione, si hanno transitori di apertura degli avvolgimenti induttivi e quindi scintillio (attenuabile con opportuni sistemi ma non eliminabile).
Queste scintille comportano disturbi elettrici sia irradiati nell'ambiente circostante che trasmessi al generatore di tensione (che alimenta il motore); questi disturbi, in determinati settori di impiego, possono causare problemi di compatibilità elettromagnetica.
La presenza di avvolgimenti elettrici sul
rotore ha anche due aspetti negativi:
Se il motore è di grossa potenza si hanno dei problemi di smaltimento del calore (gli avvolgimenti si riscaldano per effetto Joule e il campo magnetico alternato nel nucleo del rotore genera altre perdite, causate da isteresi magnetica e correnti parassite nel nucleo stesso, e quindi altro calore.
Gli avvolgimenti appesantiscono il rotore (aumenta il momento d'inerzia): se il motore deve rispondere con rapidità e precisione (come avviene nelle automazioni industriali e nella robotica) il controllo diventa più complesso; per piccole potenze (da 1 a 200W) e servocontrolli a volte si usano particolari tipi di motori con rotore con avvolgimenti a forma di bicchiere e privo del nucleo di ferro, detti "ironless": hanno bassa inerzia e rendimento elettrico più elevato dei loro corrispondenti con rotore avvolto su nucleo di ferro.
| Elenco revisioni | |
| 28/06/2020 | Aggiornato pagina |
| 29/09/2009 | Inserito foto del robot completato |
| 16/02/2009 | Emissione preliminare |


{kind=link}