ultimo aggiornamento 29 novembre 2018
|
|
ultimo aggiornamento 29 novembre 2018 |
|
|
|
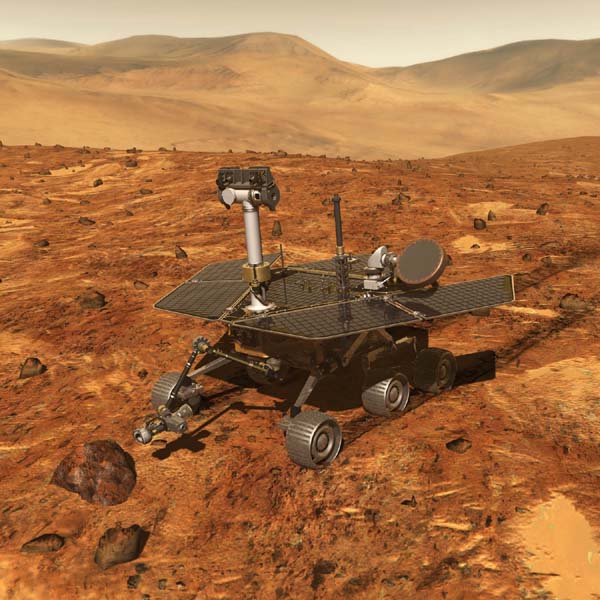
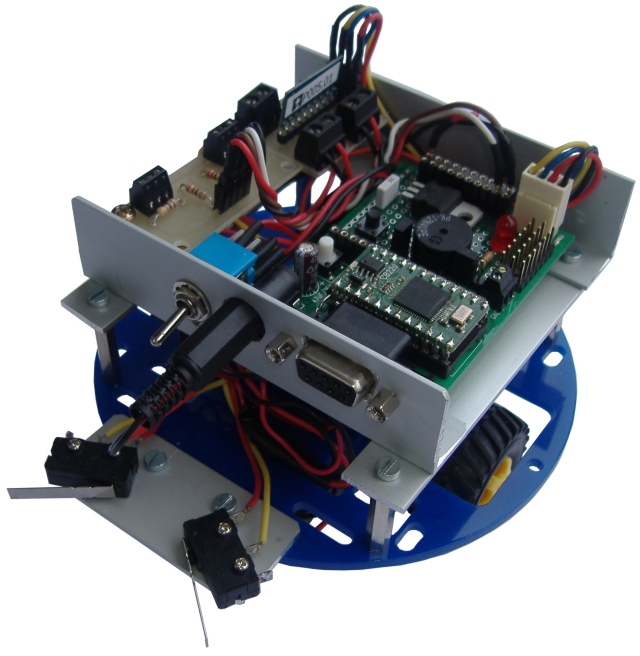
In questa è mostrato il robot Opportunity, il suo nome è in onore del ben più famoso originale Opportunity che con il rover gemello Spirit ha raggiunto Marte il 25 gennaio 2004, tre settimane dopo Spirit, atterrando dall'altra parte del pianeta.

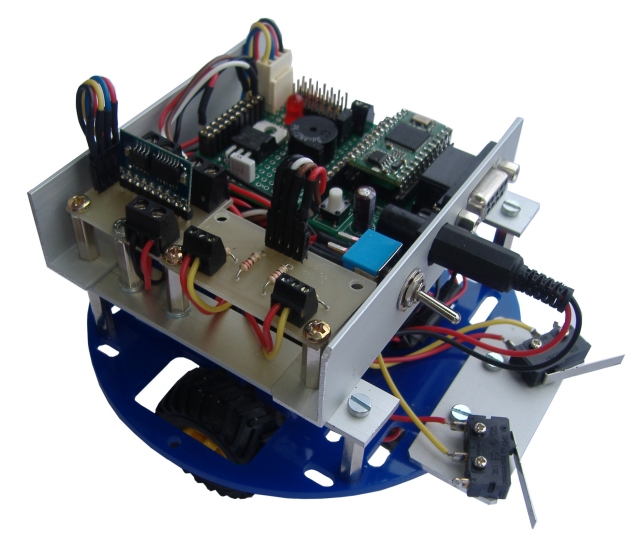
Il modello auto costruito ha il
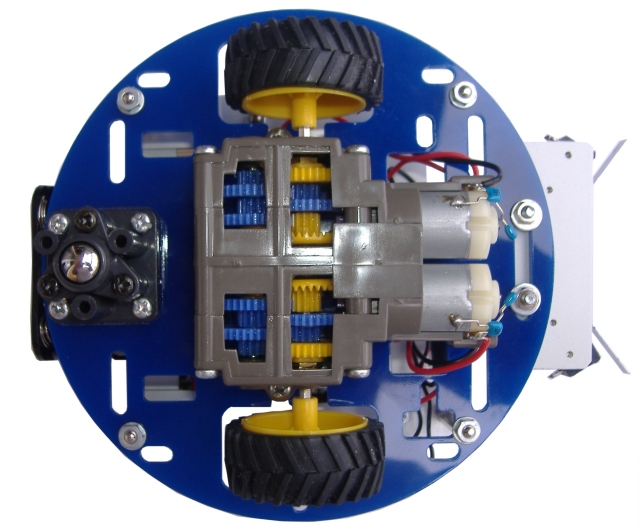
Il gruppo motore è formato dal
doppio motoriduttore
Tamiya 70168
questo è molto compatto (7cm di lunghezza), contiene due piccoli motori
DC che trasmettono il moto a due assi esagonali da 3mm separati.
Il riduttore è collegato ad una coppia di
ruote di produzione
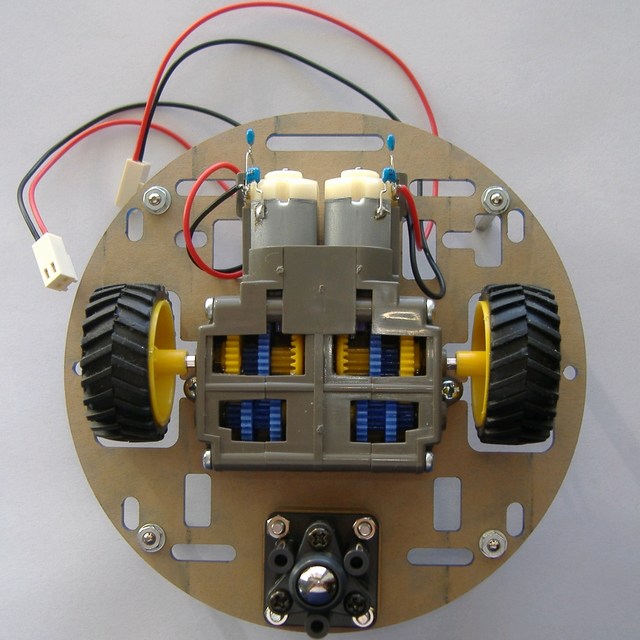
Tamiya, posteriormente è presente una
ball caster
sempre della
Tamiya.
Tutto è montato su in
telaio
prodotto dalla Pololu.
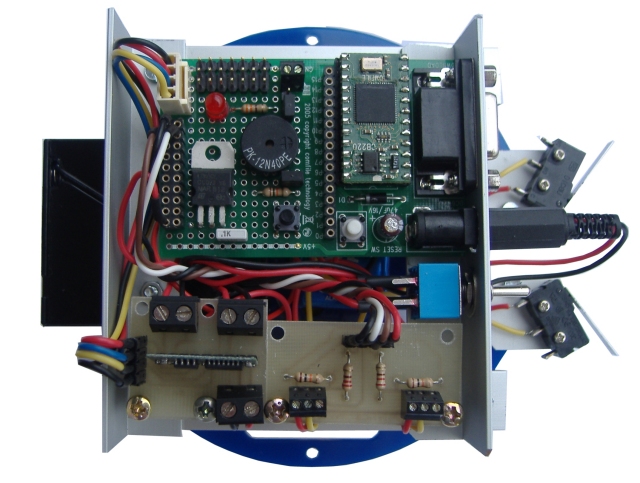
Come scheda di controllo ho utilizzato quella basata sul
CB220 della
CUBLOC, il motori sono comandati dal
modulo motore
e i sensori di contatto sono connessi al
modulo di
contatto.
|
Telaio: |
Realizzato con disco in materiale acrilico e profili in alluminio fissati con viteria zincata |
|
Motorizzazione: |
Doppio motoriduttore rapporto di riduzione 203:1. |
|
Scheda di controllo: |
Scheda con microcontrollore Cubloc CB220, basato sul microcontrollore Atmel Atmega128 (8 bit RISC). |
|
Linguaggio di programmazione |
BASIC |
|
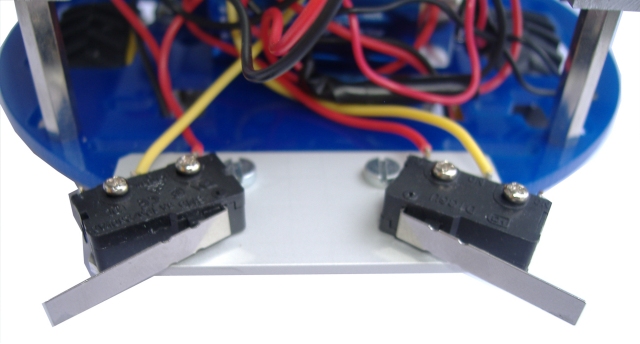
Sensori: |
2 sensori di contatto anteriori |
|
Altro: |
Buzzer di segnalazione, pulsante di attivazione |
|
Funzioni: |
Navigazione autonoma |
|
Sorgente di alimentazione: |
3,6V (3x1,2 tipo AA) batterie ricaricabili NiMH alimentazione motori, 9V alimentazione scheda controllo |
|
Dimensioni |
150x127 mm |
|
Altezza: |
95 mm |
|
Peso: |
468 g (incluse batterie) |

Articoli che parlano del Robot
|
Alcune foto dei componenti
 |
 |
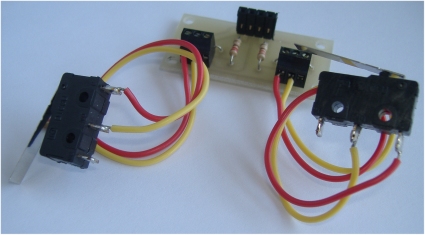
| Modulo contatto | Modulo motori DC |
|
Fotografie delle prime prove
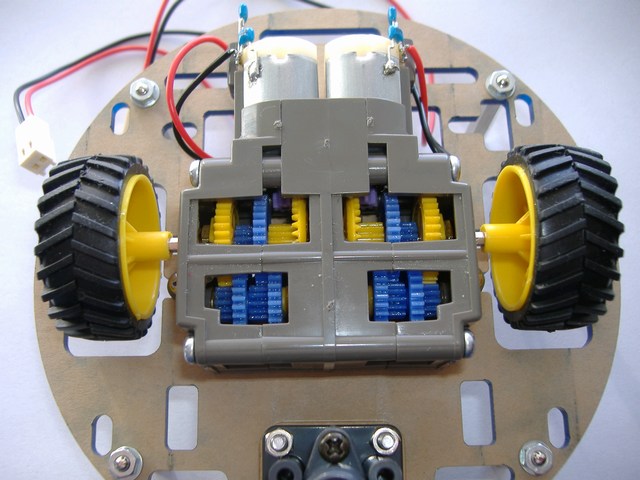 Dettaglio riduttore |
 Dettaglio condensatori sui motori |
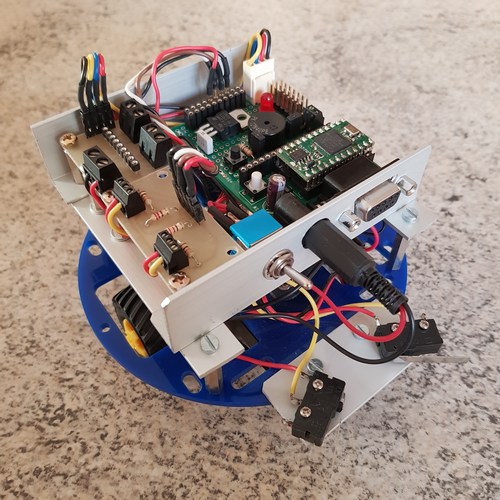
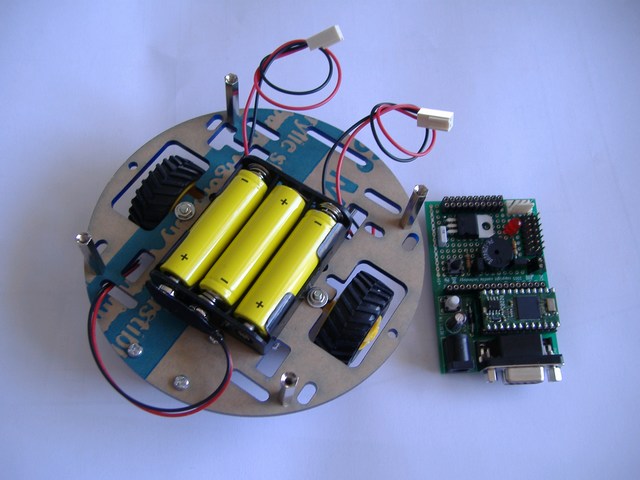
 Vista superiore del telaio |
 Vista inferiore del telaio |
| Elenco revisioni | |
| 29/10/2018 | Aggiornato pagina |
| 11/11/2009 | Inserito filmato |
| 07/10/2009 | Inserito riferimenti al modulo motore e contatto |
| 29/09/2009 | Inserito foto del robot completato |
| 16/02/2009 | Emissione preliminare |