![]()
ultimo aggiornamento 4 luglio 2020
|
ultimo aggiornamento 4 luglio 2020 |
|
|
|
Il Robot Penguin è prodotto dalla Parallax (prodotto attualmente fuori produzione) il suo telaio è realizzato in alluminio mediante macchine CNC. Si tratta di un robot bipede alto circa 110mm. La scheda di controllo è realizzata con un BASIC Stamp 2px24 "embedded”. Il Pinguino deve anche il suo nome al modo in cui cammina che ricorda proprio l’incedere di un pinguino.

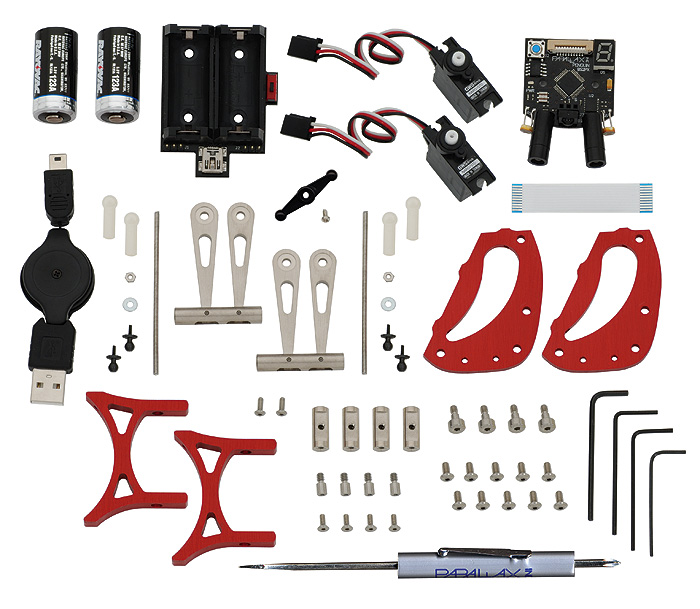

Le parti componenti il
corpo del robot sono realizzate con una stretta tolleranza mediante
macchine a controllo numerico.
La scheda di controllo
è già montata è può utilizzare un vasto assortimento di sensori e
dispositivi.
Il montaggio non dovrebbe
occupare più di un paio d'ore.
Il codice di programmazione del robot è abbastanza facile. C ome prima
cosa, si dovrà utilizzare il programma ServoCalibration.bpx per
la calibrazione dei servomotori.
I valori definiti in questa sede vengono scritti nella EEPROM, questa
particolarità permette l'utilizzo di queste costanti per tutti i
programmi sviluppati successivamente.
I sensori sono aggiunti tramite delle subroutine e le direzione di
marcia sono stabilite assegnando un valore alla variabile WALK (avanti,
indietro, a destra o a sinistra).
I sensori sono controllati mentre il robot è in movimento , è quindi
possibile lavorare sul resto del programma PBASIC senza doversi
preoccupare dei movimenti.
Il robot non è stato progettato per percorrere lunghe distanze o per
muoversi su superfici morbide
Caratteristiche:
Processore BS2px24
Telaio in allumino lavorato CNC disponibile nei colori nero, rosso, blu o nickel
N° 2 microservo
Bussola digitale Hitachi HM55B
N°2 fotocellule
N°2 emettitori infrarossi e un ricevitore a infrarossi per il rilevamento di oggetti o per controllo remoto utilizzando il telecomando ad infrarossi Parallax
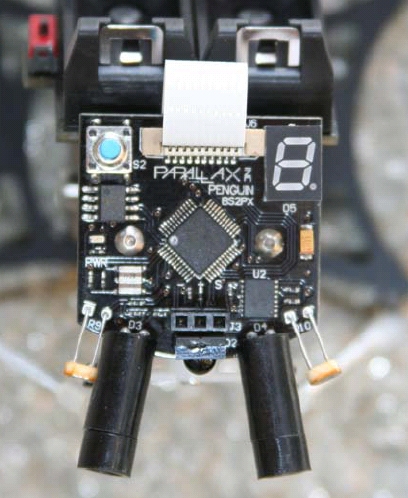
Display a led Blue sette segmenti per il controllo di feedback.
Piezospeaker nel corpo sotto porta batteria
N°2 batterie CR123 al litio da 3V
Porta di espansione per sensore sonar, moduli RF o altri ingresso / uscita
Interruttore di alimentazione posto adiacente alla batteria
FTDI 232BL mini porta USB di programmazione
Led blu di presenza tensione
Specifiche tecniche:
| Tensione di alimentazione : | 6 VDC |
| Tipo di comunicazione: | Seriale |
| Dimensioni: | 24 x 20 x 8 mm |
| Temperatura di lavoro: | circa 80 x 108 x 89 mm |

Altri filmati dalla rete



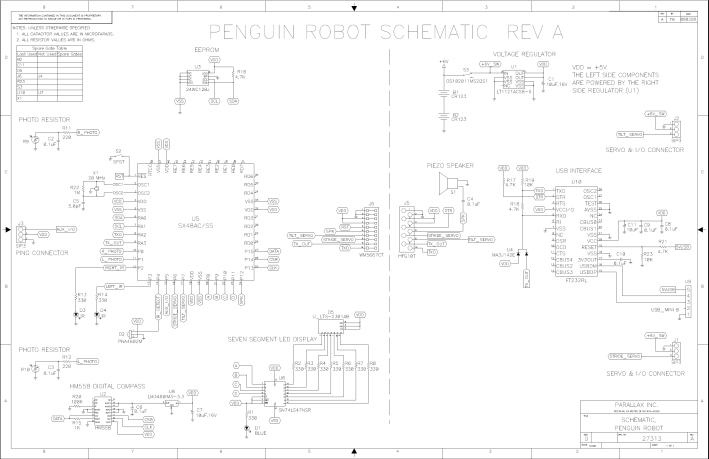
Schema elettrico della scheda di controllo
Sulla scheda sono
presenti i seguenti componenti principali: Basic Stamp II px24 (processore
SX48AC/SS), la memoria EEprom (24WC128J), il regolatore di tensione
LT1121ACS8-5, provvede a fornire la tensione di uscita VDD pari a +5V, partendo
da qulla delle due batterie da 1,5V. Troviamo poi l'integrato per
l'interfaccia USB tipo FT232RL.
Come sensore abbiamo la bussola digitale HM55B alimentata tramite l'integrato
LM3480IM3 che ha il compito di abbassare la tensione di +5V a quella di 3.3 per
l'alimentazione dell'integrato.
| Elenco revisioni | |
| 04/07/2020 | Aggiornato pagina |
| 03/03/2011 | Aggiornato pagina |
| 24/10/2010 | Aggiornato pagina |
| 09/02/2010 | Emissione preliminare |

