
ultimo aggiornamento 19 gennaio 2017
|
ultimo aggiornamento 19 gennaio 2017 |
|
|
|
La pinza e il braccio qui descritta sono prodotti dalla DAGU e distribuiti dalla Sparkfun.
|
|
|
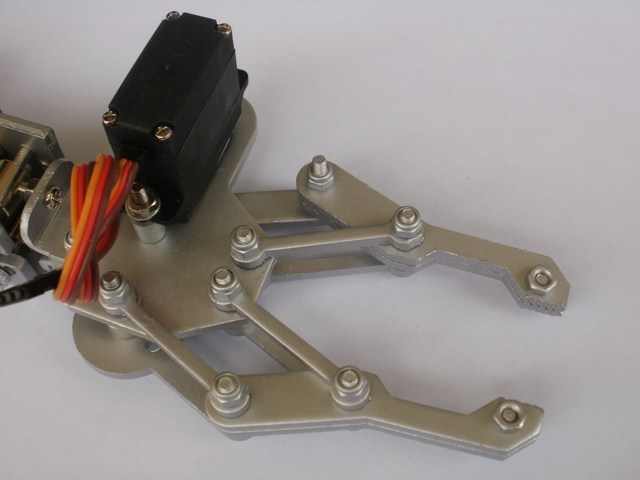
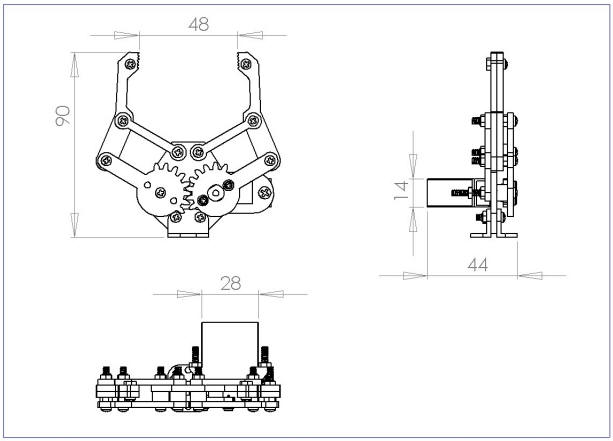
Realizzato
in alluminio, ha un'apertura massima della pinza di circa 2" (50mm), le
due braccia che la formano si muovono parallelamente l'uno
all'altro, ottenendo una buona presa.
La pinza possiede anche una piastra di montaggio sul fondo.
Il prodotto era venduto dalla
SparkFun
codice ROB-10332 (ora ritirata).
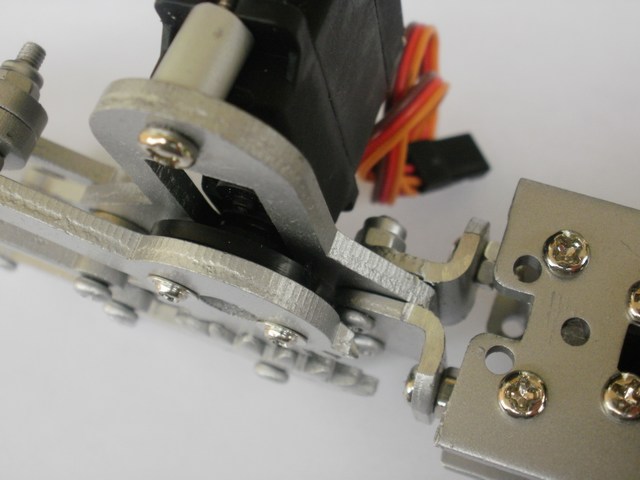
Dispositivo Staffa Pan / Tilt per pinza
Si tratta di supporto per pan /
tilt progettato specificamente per funzionare con la
pinza. Viene fornito con tutti componenti meccanici
necessari per collegarlo e comprende anche il servo 'tilt' di
controllo. Il Panning può essere controllato collegando
un'ulteriore servo alla staffa di base.
Il prodotto può essere acquistato presso la
SparkFun
codice ROB-10826
Per la gestione della pinza si può utilizzare:
Una pinza dotata di servomotore connesso alla porta I/O 9
Una scheda Arduino UNO (o Duemilanove)
Una scheda I/O (tipo DFRduino I/O Expansion V4 o DFRduino I/O Expansion V5)
Un potenziometro da 10 kΏ connesso alla porta analogica 0

Gestione Braccio
Per la gestione del braccio può essere anche utilizzato un apposito modulo, per esempio:
Il Micro Maestro è un servo controller molto versatile con pin di I/O general-purpose dalle dimensioni molto contenute. Supporta tre metodi di controllo: USB per una connessione diretta con il computer, seriale TTL per l'utilizzo con sistemi embedded, e internal scripting per applicazioni integrate, senza bisogno di un controllore esterno.
Il Micro Serial Servo Controller, la scheda Servo Serial Controller si presenta come uno stampato di piccole dimensioni su di essa trovano posto oltre al processore a 8 bit con memoria flash tipo PIC16F628A, un regolatore di tensione, tre led di stato e vari connettori con funzione di alimentazione, di interfaccia TTL e per il collegamento dei servomotori.
Una scheda autocostruita per il controllo di otto servomotori controllati da una linea seriale, basata sul microcontrollore PIC16F84A-04/P, la scheda ha la possibilità di settare il proprio indirizzo, in questo modo si possono collegare sino a otto schede contemporaneamente il che porta a poter controllare fino a 64 singoli servomotori.
 |
 |
|
| Micro maestro | Serial Servo Controller | Scheda autocostruita |
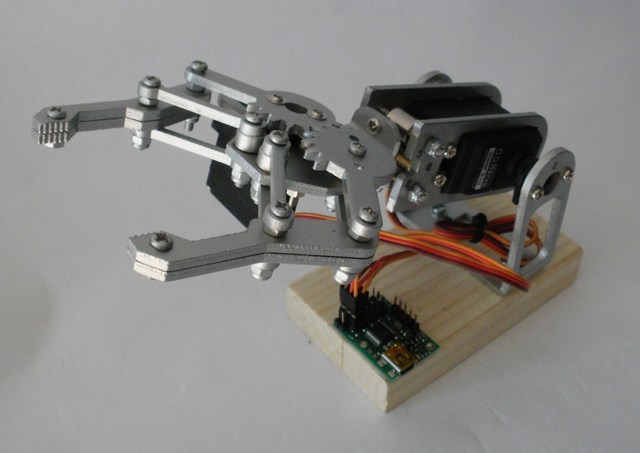
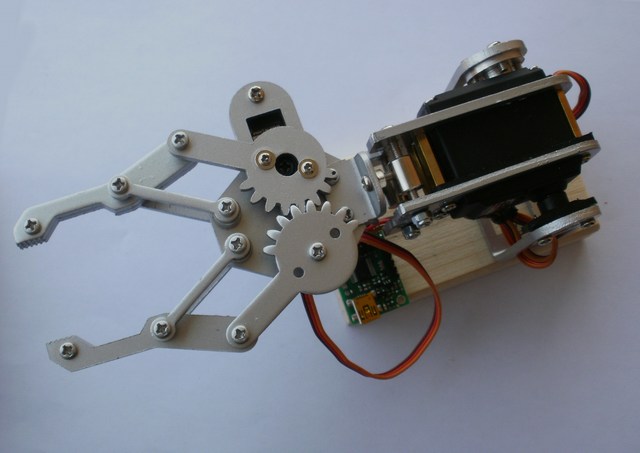
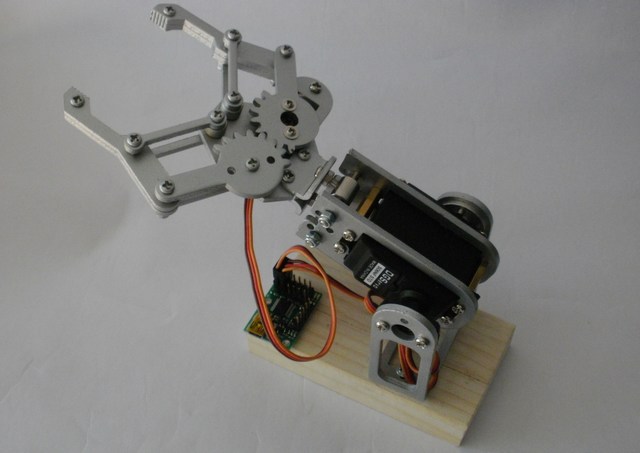
Foto d'assieme del braccio montato
|
||||||||||||||||
Misure della pinza
Componenti della pinza
|
||||||||||||
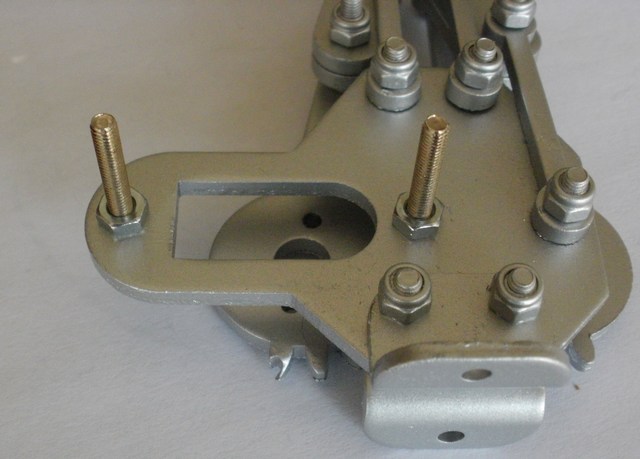
Foto dei particolari pinza (fonte SparkFun)
|
|||||||||||||||||||||||
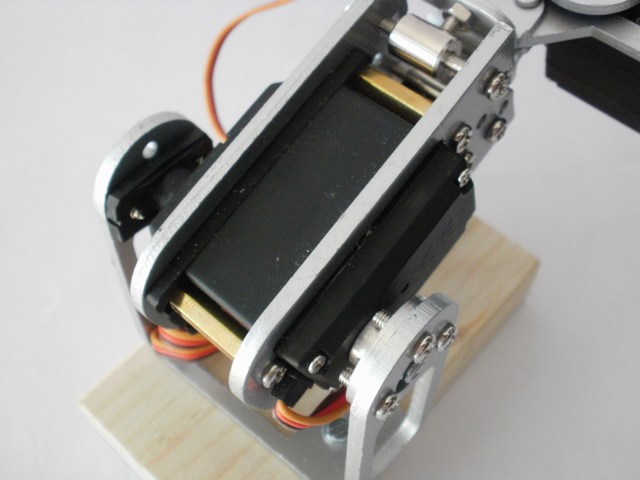
Fasi di costruzione della pinza
|
||||||||||||||||
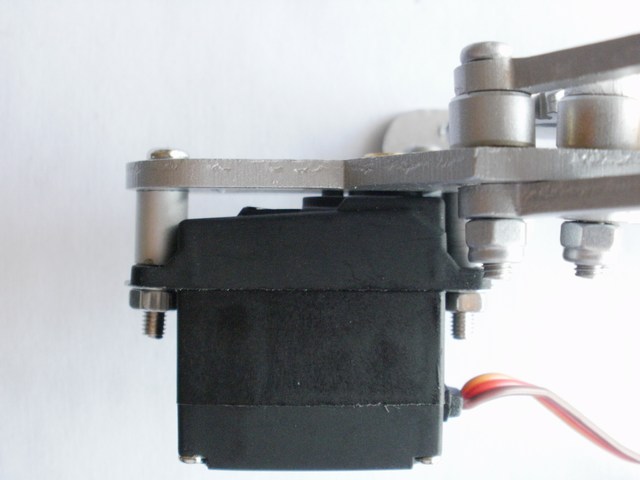
Dispositivo Staffa Pan / Tilt per pinza
|
||||||||||||||||
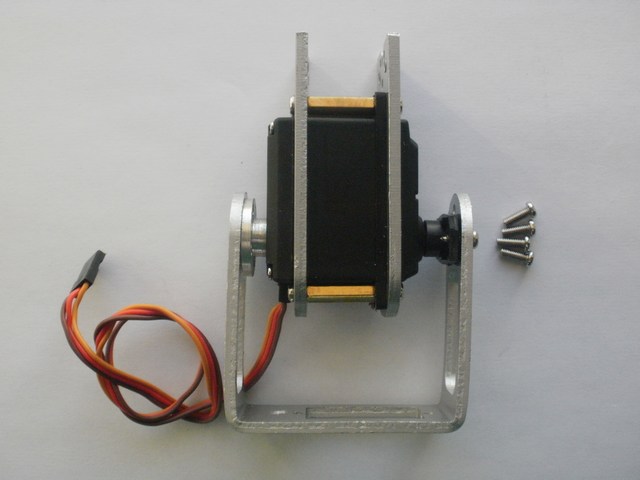
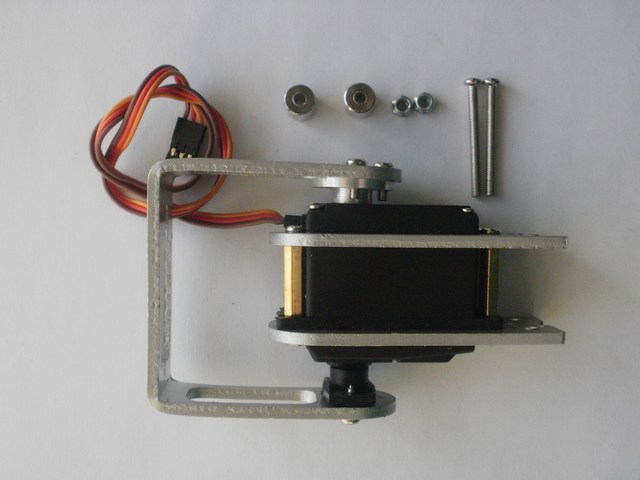
Componenti del braccio
Fasi di costruzione del braccio
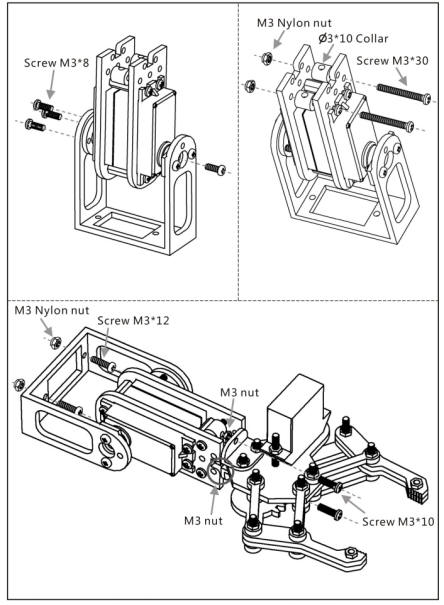
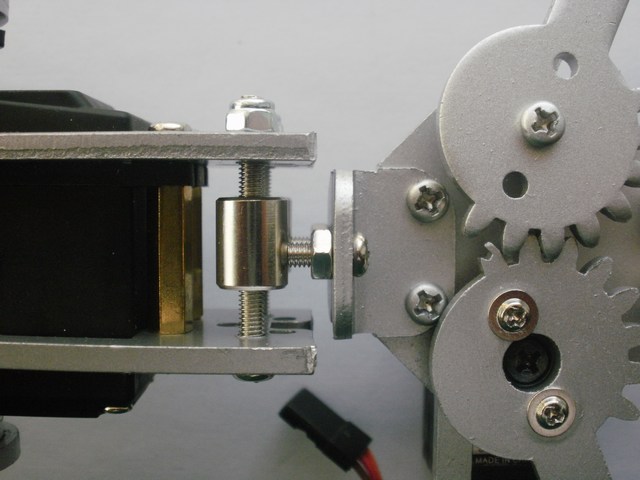
Foto di dettaglio del montaggio del braccio
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
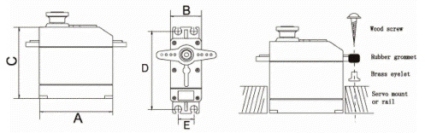
Caratteristiche dei servo utilizzati
La pinza utilizza due diversi servomotori analogici prodotti dalla DaguRobot, il maggiore è il modello S06NF STD e il più piccolo modello S05NF STD.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
![]()
S06NF STD

S05NF STD
Una volta completato il montaggio della pinza si potrà passare al collaudo, per questo sono necessari:
Una pinza dotata di servomotore connesso alla porta I/O 9
Una scheda Arduino UNO (o Duemilanove)
Una scheda I/O (tipo DFRduino I/O Expansion V4 o DFRduino I/O Expansion V5)
Un potenziometro da 10 kΏ connesso alla porta analogica 0
|
Per la prova si caricherà nella memoria del processore il programma sotto riportato utilizzando l'apposito ambiente di sviluppo scaricabile da https://arduino.cc/en/Main/Software (nella figura la versione 022)
|
|
| Elenco revisioni | |
| 19/01/2017 | Aggiornato pagina |
| 03/04/2016 | Aggiornato pagina |
| 29/04/2013 | Inserito nuove foto del montaggio pinza |
| 03/10/2012 | Aggiornato pagina |
| 17/08/2011 | Emissione preliminare |