ultimo aggiornamento 2 gennaio 2018
|
|
ultimo aggiornamento 2 gennaio 2018 |
|
|
|
Indice
PoldinoBOT è una piattaforma didattica per l'approccio alla robotica , il progetto realizzato dalla Elettra Robotics Lab, è volto alla didattica di tipo open source, il suo scopo è di avvicinare i più giovani, ma anche i più grandi, alla robotica.

Il kit messo in vendita è pensato per permettere a chiunque di
approcciarsi alla robotica, un' appassionante mondo, investendo poco.
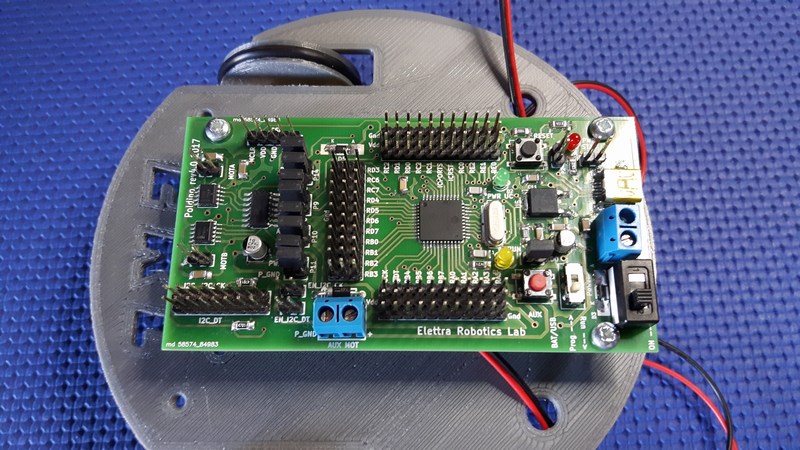
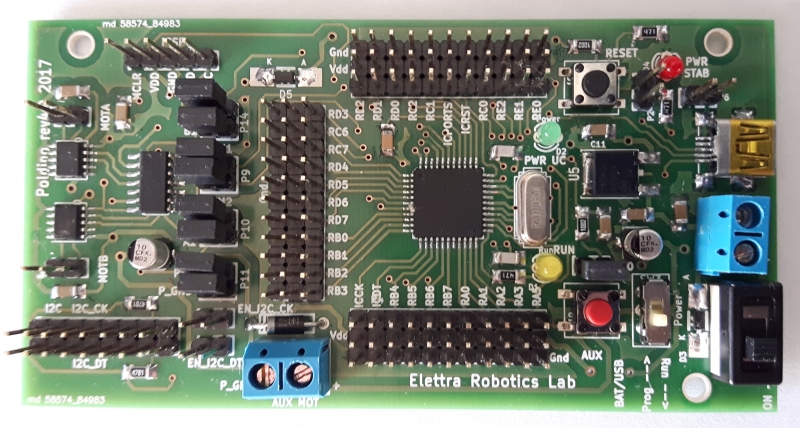
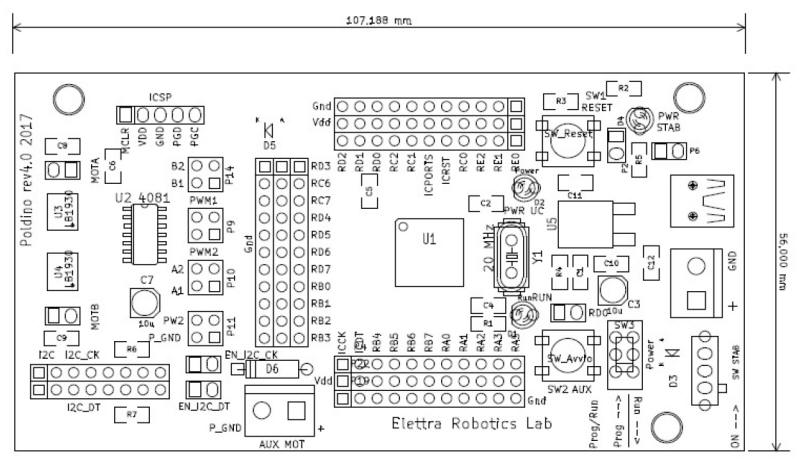
La scheda di controllo è
basata sul processore Microchip 18F4550
nella versione a 44 pin tqfp, è possibile programmarla
direttamente da un IDE che supporti tale micro o impiegando l'IDE
Pinguino (R) che consente di caricare il programma tramite la porta USB.
La scheda è munita di due driver per motori in continua, grazie ai quali
è possibile assemblare un piccolo robot senza dover usare altri
componenti.
E' comunque possibile impiegare la scheda separatamente per realizzare
il tuo robot o altri progetti embedded. La sezione ponti infatti è
separabile completamente semplicemente togliendo i jumper dai contatti
appositi. In questo modo i pin assegnati ai ponti potranno essere
impiegati come GPIO. Anche il pulsante user è abilitabile mediante
jumper
Caratteristiche della scheda di controllo


|
|
Processore PIC18F4550
44-Pin TQFP High Performance, Enhanced Flash, USB Microcontrollers with nanoWatt Technology |
||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
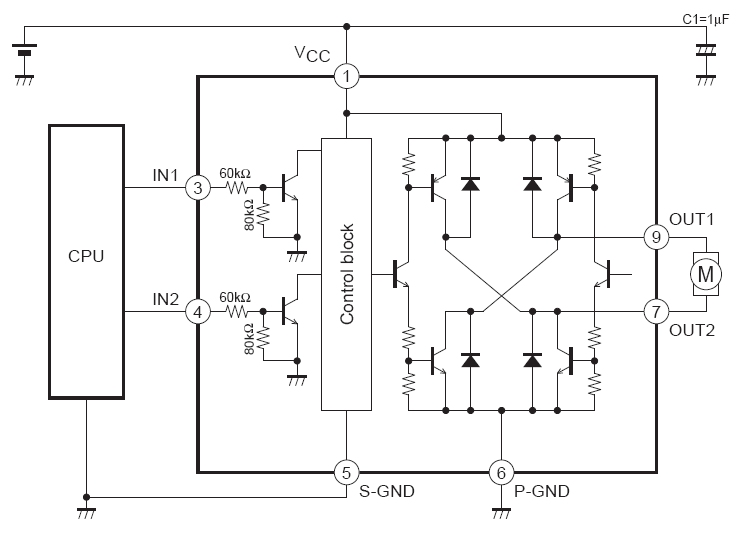
| LB1930MC Bidirectional Motor Driver 2.2-10.8V 1ch Brsuh Motor Driver | ||
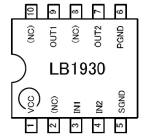 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| LM7805 Series 3-Terminal Positive Voltage Regulators | ||
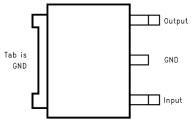 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
Definizione dei comandi e dei connettori
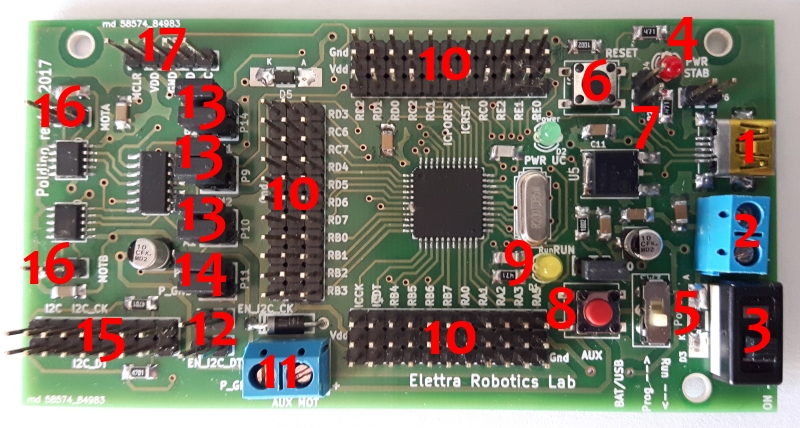
Connettore mini-USB: Non accendere la scheda mentre l’USB è collegata.
Connettore principale di alimentazione: fornisce alimentazione alla scheda. Collegare una sorgente compresa tra 6 ed 11V. Rispettare la polarità indicata. La scheda è protetta dall’inversione della polarità, ma si consiglia di curare questo aspetto.
Selettore di accensione principale: collega l’alimentazione principale alla scheda.
LED PWR STAB: indica la presenza di alimentazione proveniente dalla batteria.
Selettore PROG/RUN: porta la scheda in modalità di programmazione. In modo programmazione, l’alimentazione principale è interrotta, ma si consiglia comunque di non accendere la scheda in questa modalità.
RESET: pulsante di reset della scheda, funziona da reset principale, in modo RUN, è necessario per avviare il riconoscimento della scheda in modo PROG
P2: connettore opzionale per il reset. Se si vuole inserire un pulsante di reset remoto, in parallelo al principale, è possibile collegarlo a P2.
SW2 AUX: pulsante user. Pulsante generico per l’utilizzo della scheda. Se si vuole utilizzarlo, si deve programmare il PIN RD0 come ingresso, quindi collegare il jumper sul connettore P3/RD0. Se si usa il programma di esempio precaricato, questo pulsante funge da avvio, va quindi collegato. -LED PWR UC: Indica la presenza di alimentazione sulla scheda, che può provenire dalla batteria o dalla USB.
LED RUN giallo: è il LED USER, si può impiegare a piacere nei propri programmi, è collegato al pin RA4 del microcontrollore. E’ attivo basso, ovvero è acceso quando il pin è in stato digitale basso. Nel programma di esempio, indica che il robot è pronto all’avvio, dopo l’avvio è spento.
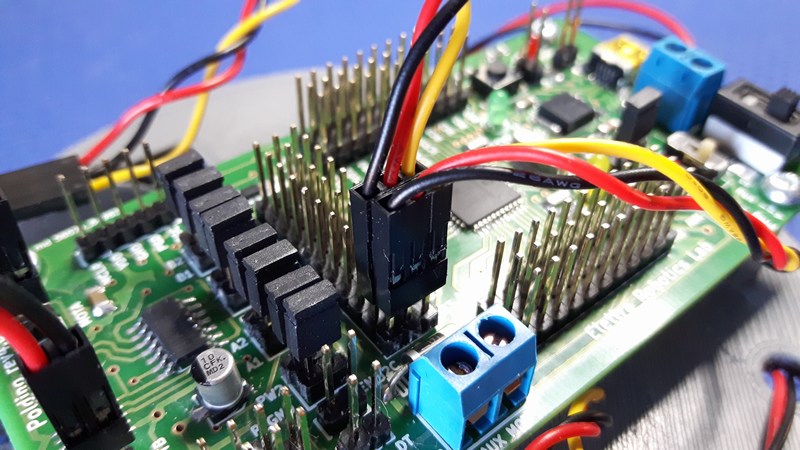
Banchi di connettori GPIO:
Sono presenti 33 pin GPIO organizzati in 3 connettori da 11. Ogni banco ha
tre file di pin: VDD, GND, pin. L’ordine è quello di un connettore di tipo
servo RC standard. Questa configurazione consente di collegare piccole
schede esterne, come ad esempio sensori aggiuntivi, portando l’alimentazione
mediante lo stesso connettore. Prestare molta cura alla polarità del sensore
che si desidera collegare, in quanto non vi sono protezioni nel caso di
errore. Per quanto riguarda i sensori forniti con il robot, i cavi sono
stati opportunamente realizzati, in quanto la polarità di destinazione è
differente. In generale, si consiglia di verificare sempre questo aspetto.
La corrente massima che è possibile prelevare dalla scheda è di circa 700mA.
Se la corrente che alimenta schede
esterne è rilevante, può essere necessario montare un dissipatore
sull’integrato regolatore
U5. Per dubbi contattare il supporto ERL.
Connettore AUX MOT: connettore per alimentazione esterna motori. A seconda delle versioni potrebbe esser necessario montarlo se si desidera usarlo. Tramite questo connettore, è possibile fornire un’alimentazione esterna ai motori, diversa da quella principale. Il range rimane comunque quello dei 6-11V. Se si vuole fare uso di questo connettore, si dovranno aprire i jumper sul connettore P11, in questo modo si scollega l’alimentazione motori da quella principale. Anche su questo connettore è presente la protezione per l’inversione di polarità, ma è necessario inserire un interruttore ausiliario esterno.
Connettori EN_I2C: consentono di abilitare il bus I2C, collegando le resistenze di pull-up presenti sulla scheda. I jumper vanno inseriti solo se si usa questa opzione e se si abilità il bus I2C dal micro. Se non si effettua questa operazione, chiudere i jumper potrebbe danneggiare i pin RB0 ed RB1 del dispositivo. Se si usa il bus I2C, i pin RB0 ed RB1 non possono essere usati.
Connettori P9, P10, P14:
collegano le uscite di controllo dei motori, agli ingressi dei driver
motori. In particolare:
- P10: direzione Motore A
- P14: direzione Motore B
- P9: PWM entrambi i motori
Connettore P11: abilita
l’alimentazione principale per i driver motori. I jumper P9, P10, P11,
e P12 vanno collegati per l’impiego del programma di esempio. Se non si
desidera usare Poldino_Board per controllare dei motori, o si vuole
utilizzare un driver esterno, è possibile aprire tali connettori e prelevare
i segnali logici dagli stessi connettori ad un’altra board, oppure
impiagarli come GPIO.
I pin impiegati per controllo motori sono i seguenti:
P9: RC1, RC2
P10: RB4, RB5
P14: RB6,RB7
I2C: bus I2C, va abilitato via software, e mediante i connettori EN_I2C. E’ possibile collegare sulla scheda direttamente 8 dispositivi in I2C, è possibile espandere esternamente il bus, fino al limite fisico del protocollo.
MOTA e MOTB: connettori di collegamento per i Motori di PoldinoBot.
ICSP: connettore per la programmazione mediante IDE Microchip
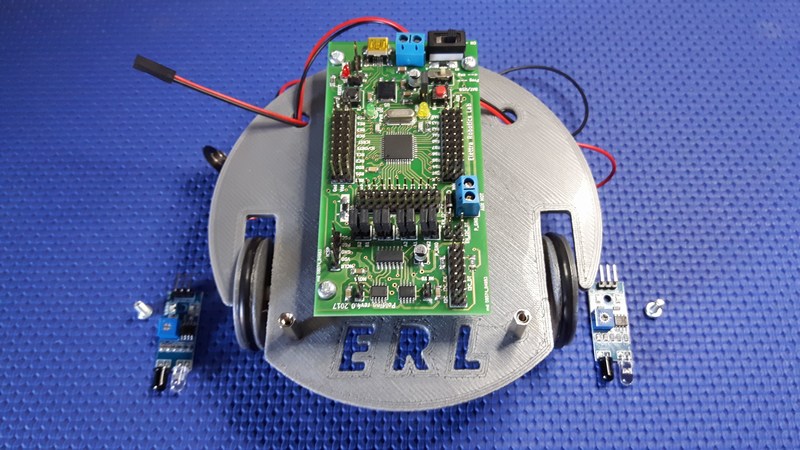
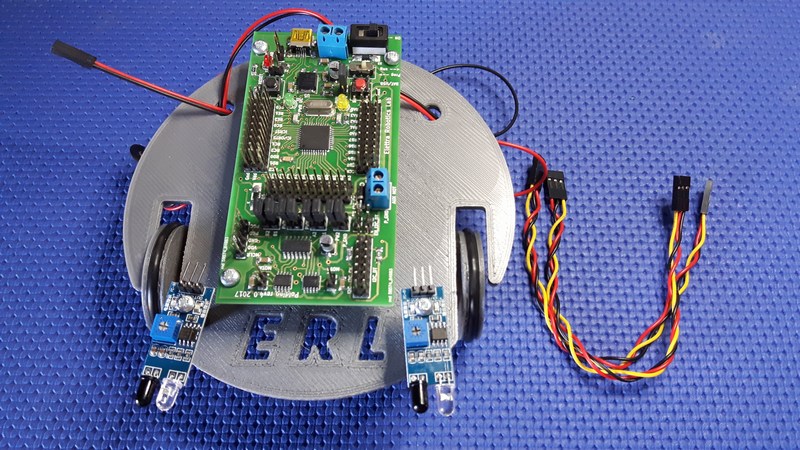
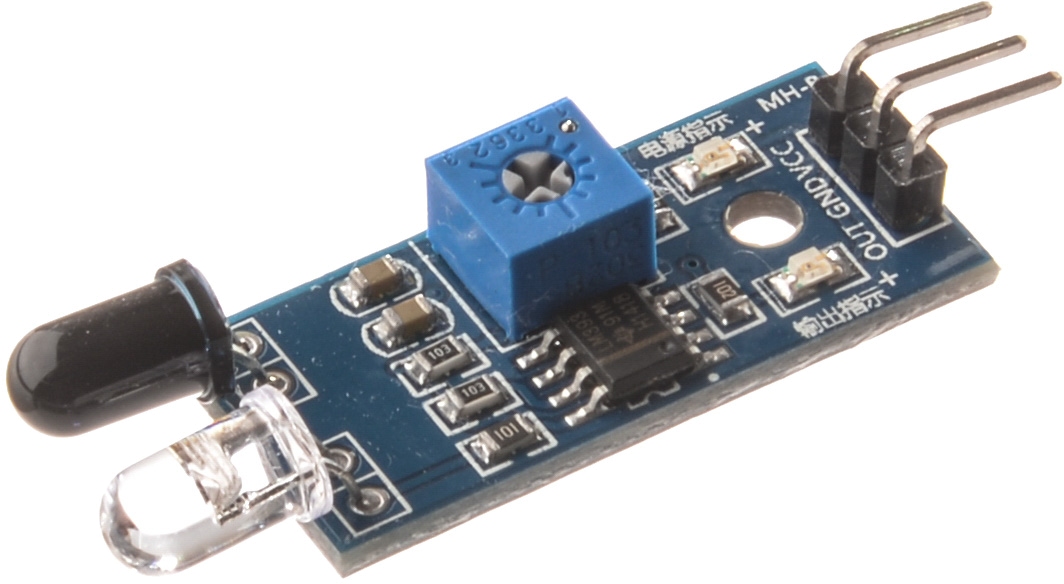
All'interno del kit di
PoldinoBOT, sono
forniti due sensori in grado di rilevare un ostacolo posto di fronte al
sensore, l'accensione del led presente sul modulo segnala la presenza
dell'ostacolo, allo stesso tempo il pin OUT viene portato a livello
basso.
Il modulo rileva un oggetto ad una distanza compresa tra i 2 e i 30 cm,
con un angolo di rilevamento di 35°, la distanza può essere regolata
tramite il trimmer, ruotando in senso orario la distanza aumenta;
ruotando in senso antiorario la distanza di rilevamento diminuisce.
Il modulo utilizza utilizza una coppia di diodi infrarossi che funzionano per riflessione, sono quindi importanti la forma e la
riflettività del bersaglio. Anche il colore influenza il
funzionamento, la distanza di rilevamento sarà minima nel caso l'oggetto
sia nero, e massima nel caso sia di colore bianco.
Per maggiori informazioni vedere l'apposita pagina.
 |
 |
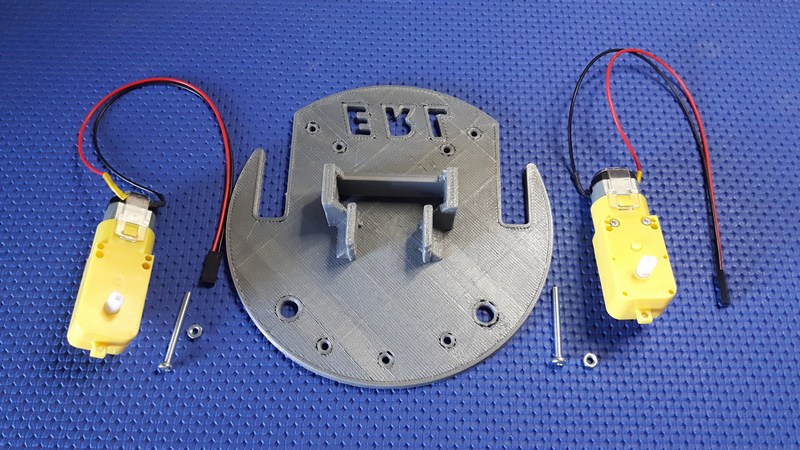
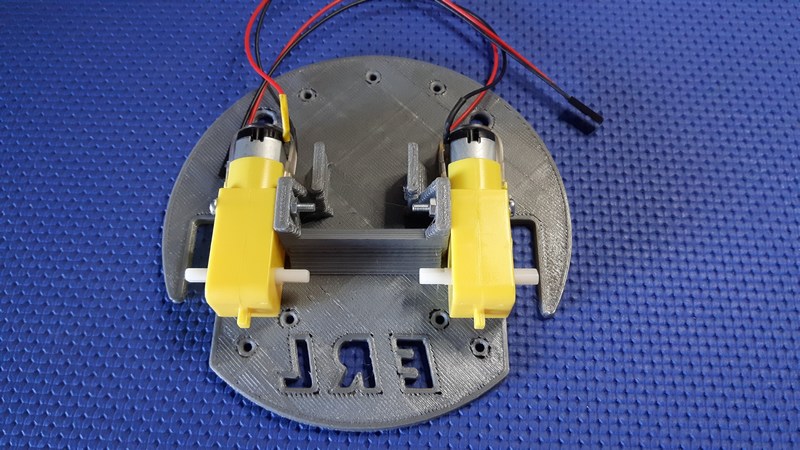
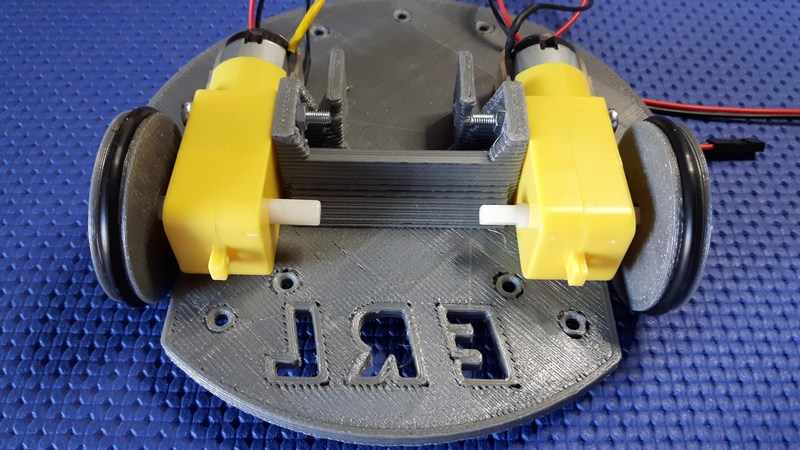
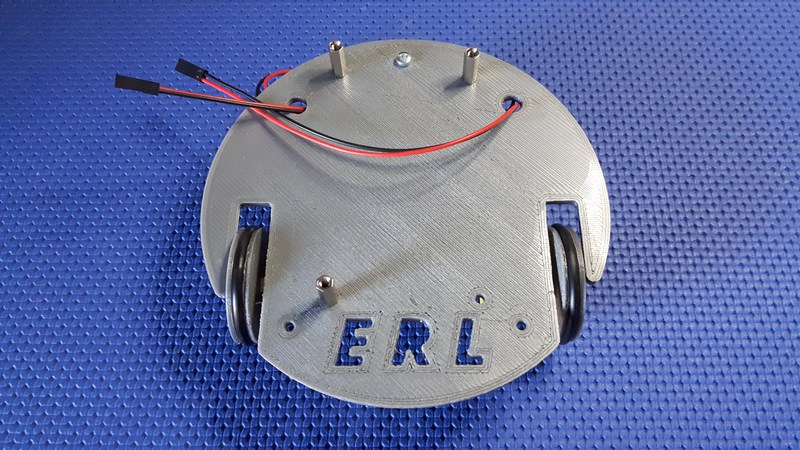
PoldinoBOT viene venduto in Kit, all'interno della confezione sono presenti tutti i componenti, per il suo montaggio, il telaio è realizzato stampa 3D.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Una volta assemblato PoldinoBOT è pronto al primo avvio, nella memoria del processore è già precaricato il programma:
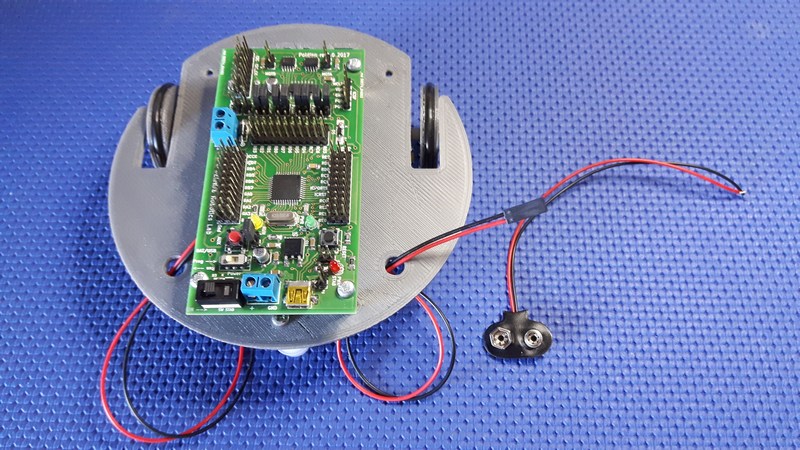
Assicurarsi che il selettore Prog/Run sia in posizione Run ed il selettore On/OFF sia in posizione OFF.
Collegare la batteria di alimentazione
Accendere PoldinoBOT portando il selettore On/OFF in posizione ON (leva spostata verso il morsetto a vite). Tutti i LED sono accesi.
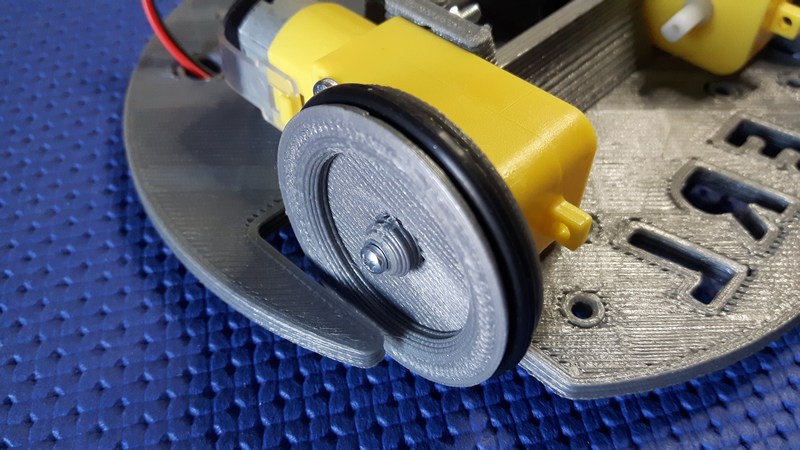
A questo punto, il robot non si muove ancora, ma è possibile regolare la sensibilità sei sensori. Agire sulla vite del potenziometro del sensore, come mostrato in figura. Il sensore ha a bordo due LED, quello rosso, sulla destra, si accende quando è alimentato, il secondo, verde, indica la presenza dell’ostacolo. Regolare il sensore in base alle condizioni di luminosità dell’ambiente in cui ci si trova. Un cambio di luminosità potrebbe rendere necessaria una nuova regolazione.
il robot è pronto per l’avvio, premere il pulsante SW2 AUX (rosso), il robot si muove secondo il programma reimpostato evita ostacoli. Dopo l’avvio, il LED giallo RUN, è spento.
|
Elenco revisioni |
|
|
02/01/2018 |
Emissione preliminare |