ARDUINO
Sensore anticollisione ad infrarossi
ultimo aggiornamento 29 novembre 2018
|
|
ARDUINO |
|
|
|
Indice
Questo modulo si può trovare con il codice SG035-SZ oppure FC-51, esso rileva un ostacolo posto di fronte al sensore, l'accensione del led presente sul modulo segnala la presenza dell'ostacolo, allo stesso tempo il pin OUT viene portato a livello basso.
Potete trovare il modulo sensore presso la ICstation.com con codice 2432 Obstacle Avoidance Infrared Sensor Module Reflection Photoelectric Sensor Board for Tracking Smart Car. Il costo si aggira sui 2€
![]()

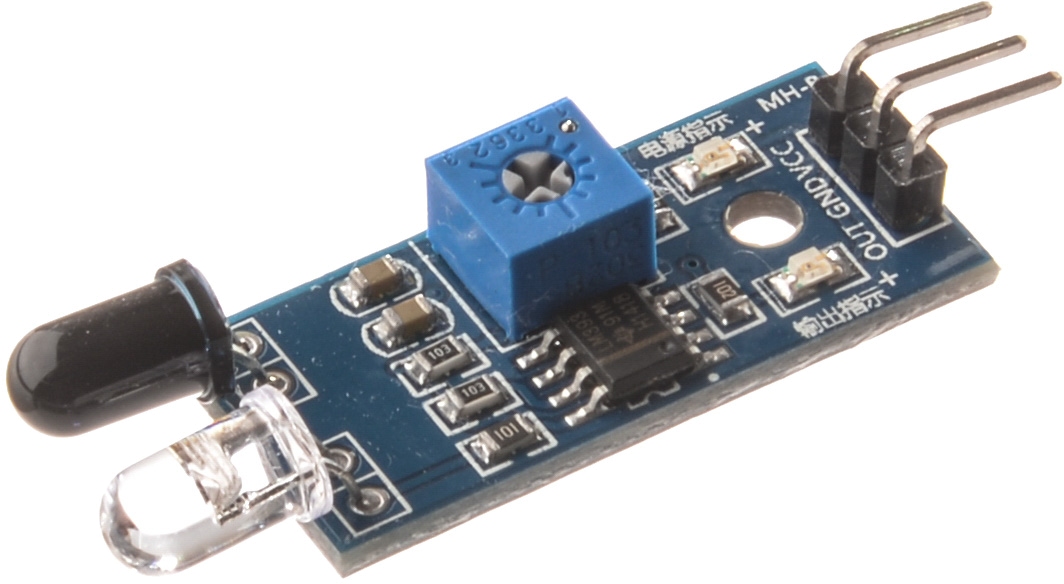
Il modulo rileva un oggetto ad una distanza compresa tra i 2 e i 30 cm,
con un angolo di rilevamento di 35°, la distanza può essere regolata
tramite il trimmer, ruotando in senso orario la distanza aumenta;
ruotando in senso antiorario la distanza di rilevamento diminuisce.
Il modulo utilizza utilizza una coppia di diodi infrarossi (uno
emittente e
uno ricevente)
che funzionano per riflessione, sono quindi importanti la forma e la
riflettività del bersaglio. Anche il colore influenza il
funzionamento, la distanza di rilevamento sarà minima nel caso l'oggetto
sia nero, e massima nel caso sia di colore bianco.
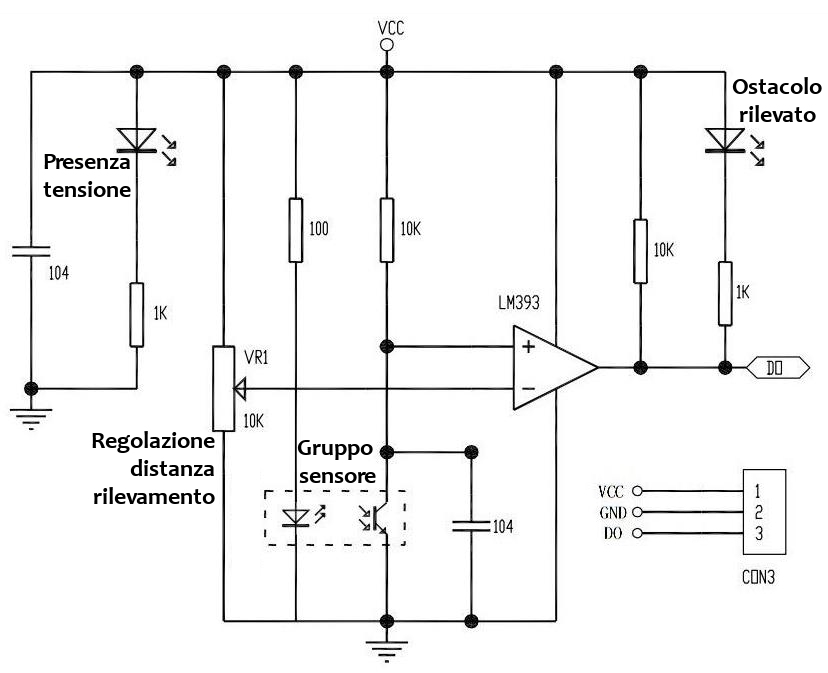
Il connettore di uscita del modulo sensore presenta la porta denominata
OUT che può essere collegata direttamente alla porta I/O di un
microcontrollore, L'uscita è in grado di pilotare direttamente un relè a
5 V ; Collegamento: VCC-VCC; GND-GND; OUT-IO.
La stabilità del segnale è garantita utilizzando un comparatore
LM393.
Il modulo sensore può essere alimentato con una tensione compresa tra
3-5 V DC , la presenza della tensione è segnalata dal relativo led
rosso.
Per il fissaggio è presente un foro per una facile installazione fissa,
diametro massimo della vite è di 3 mm.
 |
 |

|
| LM393 Low-Power, Low-Offset Voltage, Dual Comparators | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
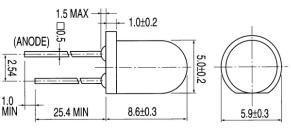
| Diodo emittente ad infrarosso, 940 nm | ||
 |
|
|
| Piedinatura | Datasheet | Foto del diodo |
| Diodo ricevente ad infrarosso, 940 nm | ||
|
|
|
 |
| Piedinatura | Datasheet | Foto del diodo |
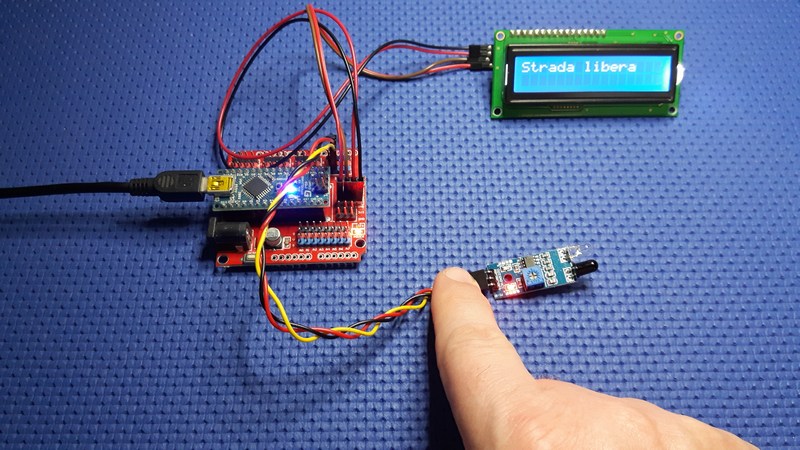
Per testare il sensore si utilizzano i seguenti componenti
  |
|
| Arduino Nano o UNO | Sensore anticollisione IR |
 |
 |
| Cavetti per Breadboard di vari colori |
Convertitore Expander seriale Bus I2C con PCF8574 con Display LCD |
I pin utilizzati sono i seguenti
|
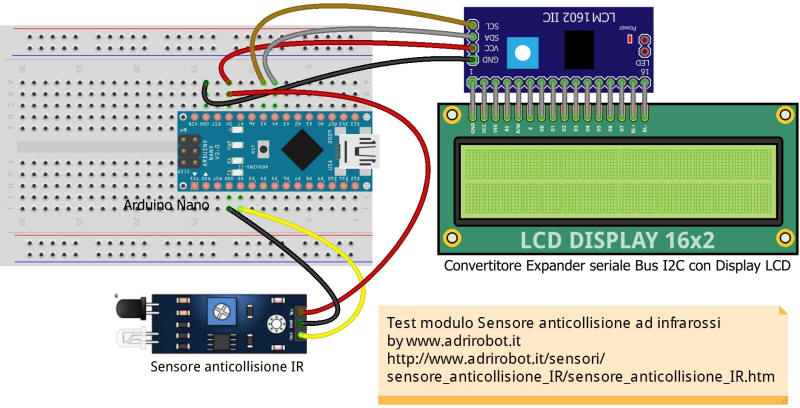
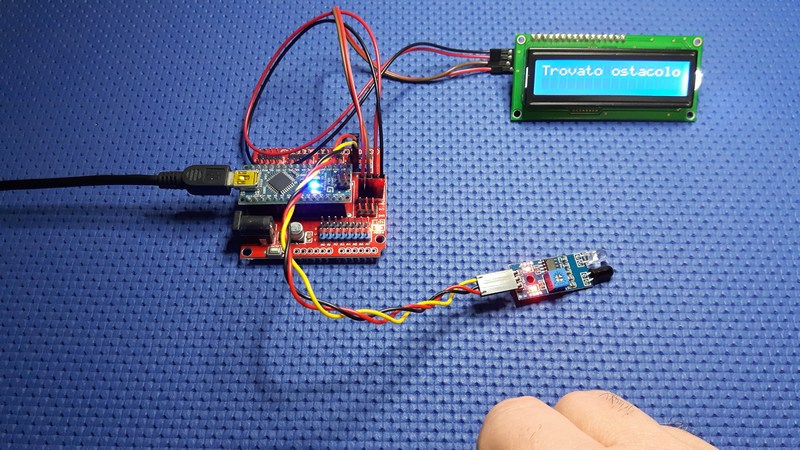
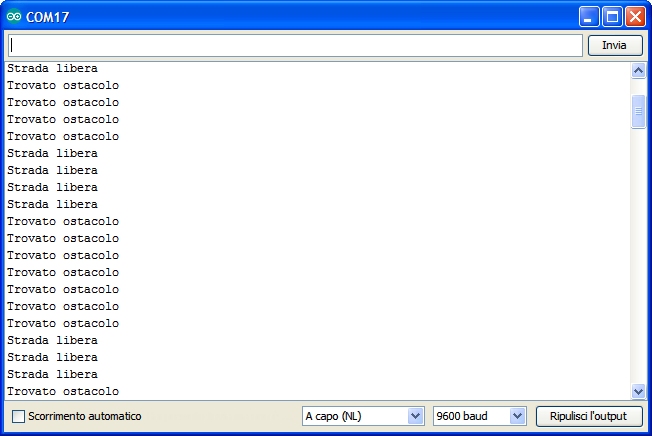
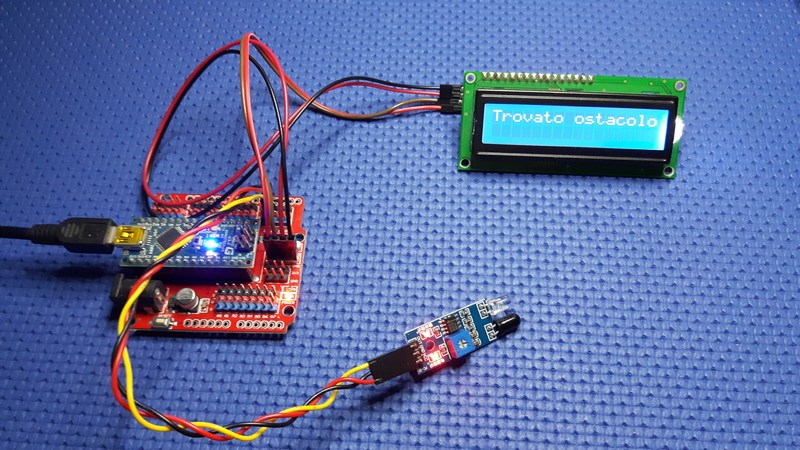
Il programma di test visualizza nella finestra del monitor seriale oppure sul display LCD se il sensore rileva un ostacolo posto di fronte. Questa situazione è anche evidenziata dall'accensione del relativo led presente sulla scheda Arduino UNO o Nano utilizzato per il test. La distanza cui è rilevato l'ostacolo può essere regolata agendo sul trimmer posto sul modulo.
|
|
| Elenco revisioni | |
|
29/11/2018 |
Aggiornato pagina |
|
28/12/2017 |
Emissione preliminare |

