Robot CUSTOS
Di Gioele Carboni
ultimo aggiornamento 7 giugno 2015
|
Robot CUSTOS |
|
|
|
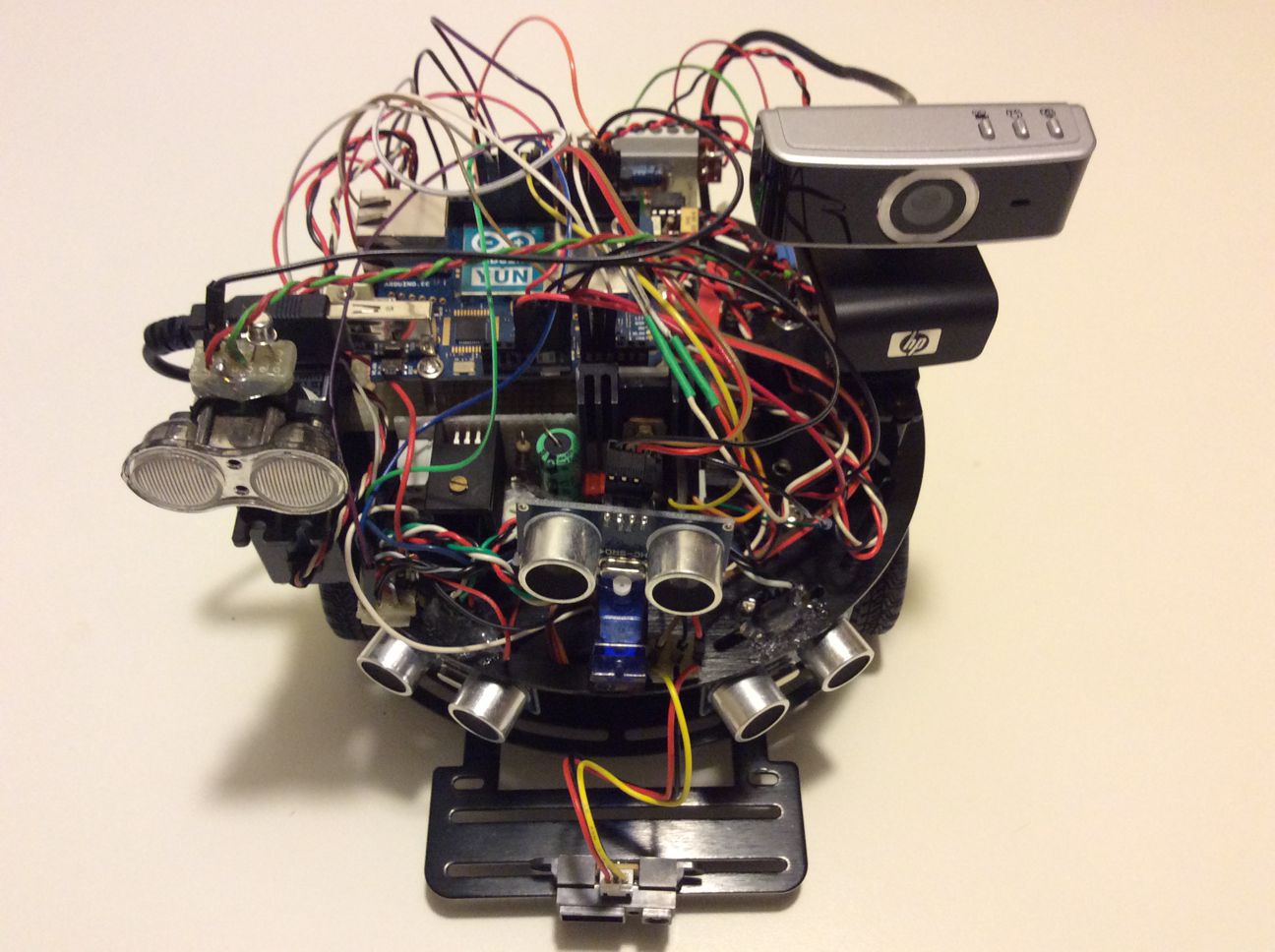
Ecco il robot realizzato da Gioele Carboni, il nome del robot è CUSTOS e fa parte di una serie di 15 (più o meno) costruiti negli ultimi anni.
|
||||||||||||
La base del robot è realizzata utilizzando La Turtle - 2WD Mobile Platform che è una piattaforma robotica prodotta dalla DFRobots.


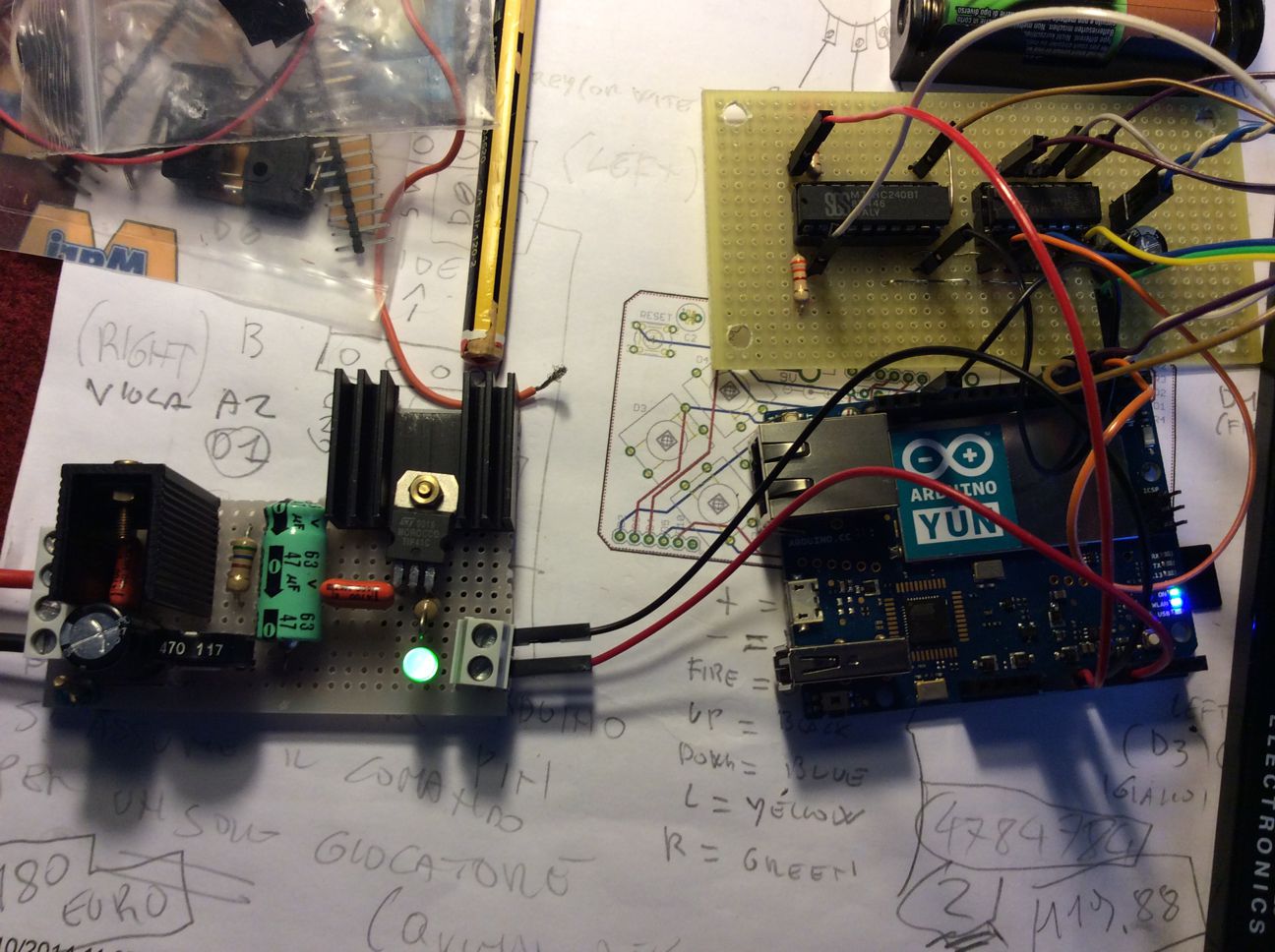
La scheda di controllo è la Arduino Yun, mentre la scheda di controllo dei motori è stata autocostruita utilizzando il classico ponte H L293D, interfacciato con la scheda tramite un inverter tipo 74HC240.
|
|
|||
| L293D Driver per ponte H | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
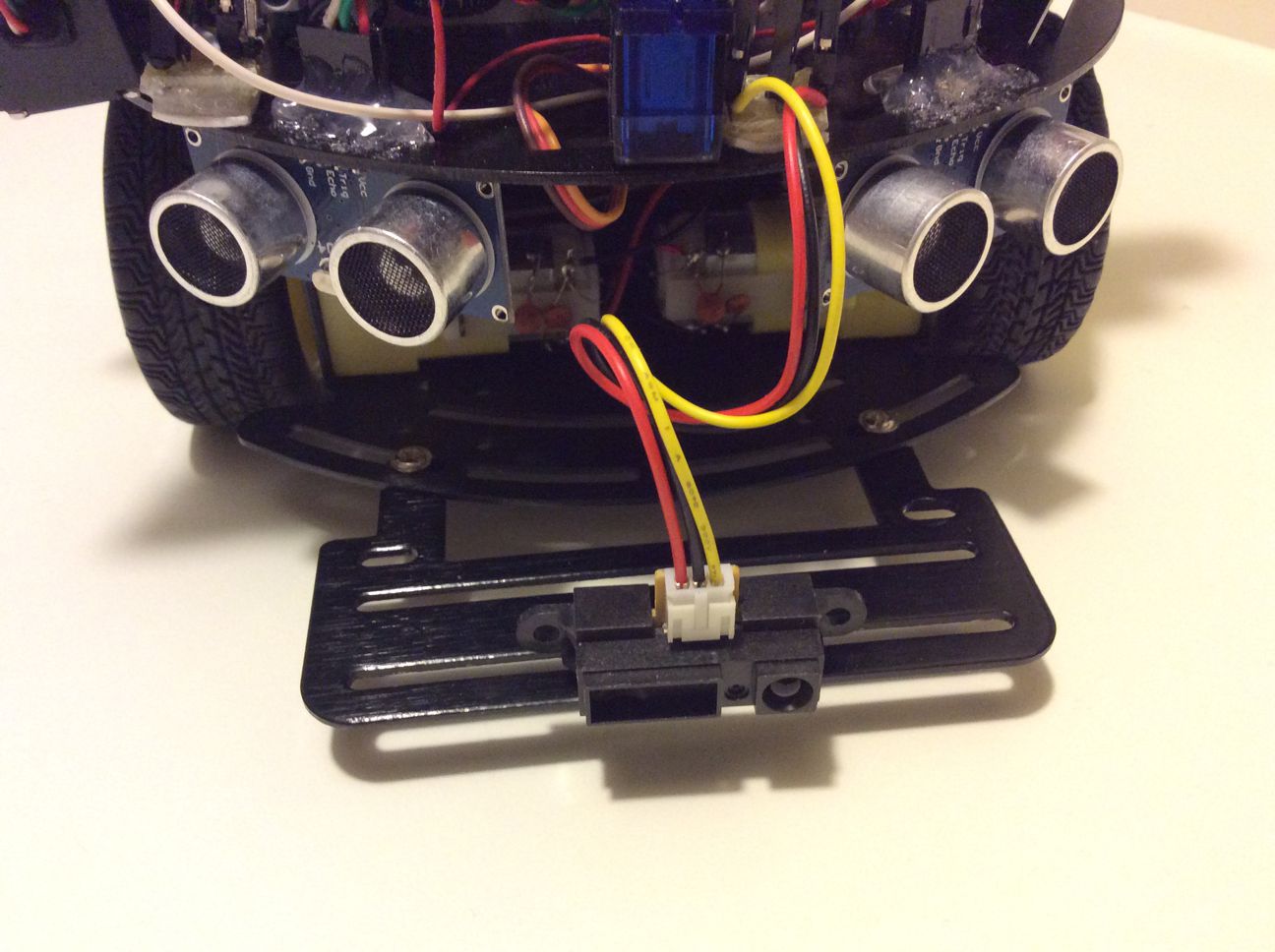
Il robot è equipaggiato anche di una webcam montata su un servo che gli permette di effettuare delle panoramiche, per la navigazione autonoma sono poi stati utilizzati due sensori laterali di tipo digitale ad ultrasuoni HCF04 per gli ostacoli laterali, e un sensore infrarosso analogico Sharp Gp2Y0 per evitare ostacoli a "filo" del pavimento
|
|
|
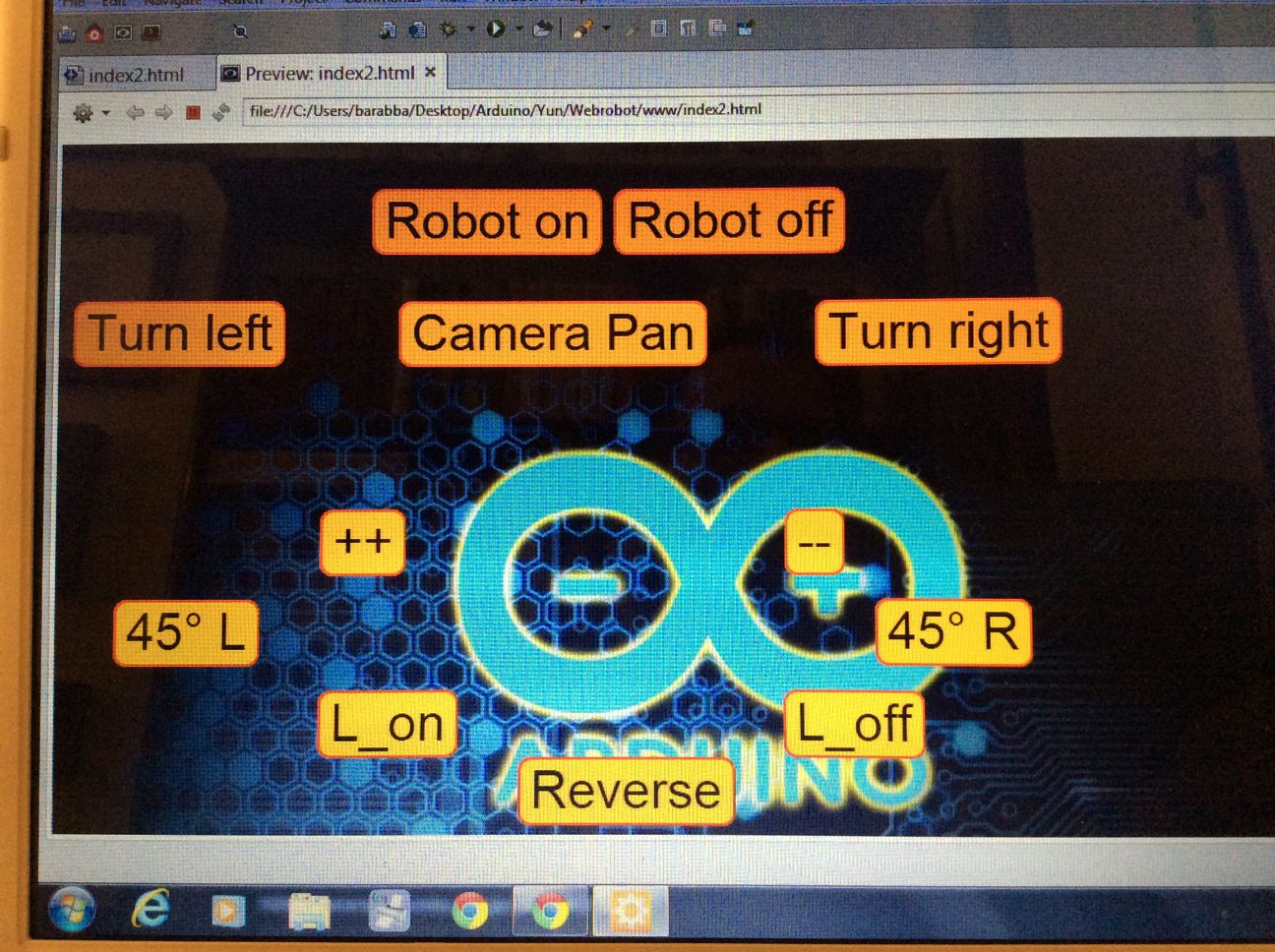
Il robot è autonomo ma è possibile telecomandarlo
attraverso uno smartphone o tablet tramite un'interfaccia scritta in html e Java
creata a proposito.
Per poterlo pilotare Yun deve essere associato ad un access point wireless,
contenere la pagina web per il controllo (in pratica si comporta come se fosse
un sito web) e il relativo sketch.
L'interfaccia è ottimizzata per un tablet (1024x768) ma è personalizzabile, sono
presenti I tasti in alto avviano e spengono i motori. Turn left - Turn Right
parlano da soli. Camera Pan ferma i motori e la Webcam compie una panoramica
(visibile in diretta sul tablet) da sinistra a destra fino in posizione
centrale. I tasti ++ e -- incrementano e decrementano la velocità di 10 step
alla volta. I tasti 45°L e 45° R compiono una sterzata di 45° circa a destra o
sinistra. L_on e L-off accendono e spengono le luci. Con Reverse,CUSTOS compie
una rotazione di 180°.
Alcune foto del robot
|
|||||||||||||||||||||||||||||||||||||||||||
Programma di gestione
/* (CUSTOS) - Robot expolrer - guardiano autonomo con possibilità di comando da pagina Web attraverso la connessione WiFi di Arduino Yun Nella pagina web (cartella www in YUN) vi è una copia, versione "minima" di jQuery. La pagina Web deve essere caricata nella scheda SD di Yun - Gioele Carboni 2014/15 La pagina iniziale si trova in http://192.168.240.1/sd/robot/Home.html //se collegato senza access point ip di default oppure in http://arduino.local/sd/robot/Home.html //se collegato con access point il video stream in http://arduino.local:8080/stream.html // come sopra per l'indirizzamento */ // Librerie #include <DistanceSRF04.h> //per il sensore centrale mobile #include "Ultrasonic.h" //Per i sensori Right e Left #include <Servo.h> #include <Bridge.h> #include <YunServer.h> #include <YunClient.h> #define rad2grad 57.295779513 //fattore di spostamento in gradi #define limitAngolo 360 //limite finecorsa servo #define incremento 1 //variabile di incremento movimento servo (1 = min.) #define accedecelera 10 //variabile di incremento - decremento velocità motori dx - sx DistanceSRF04 dist; // Definisce la visione centrale Servo neckServo; // Definisce l'oggetto "Servo" sonar const int stopDist = 17; // distanza minima dall'ostacolo sensore centrale (fino a 18 - variare il valore nel caso serva) int distance; // variabile distanza corrente dall'ostacolo sensore centrale int distArray[2]; // array della distanza misurata dal sonar (su servocomando) float angolo = 0; float grado = 0; int angEnd = 65; //angolo massimo rotazione servo int stato = 0; // variabile di controllo servo int conta = 0; // variabile di controllo servo long NumeroCasuale = 0; //numero per funzione random Servo servoA; //definisce oggetto servo per Webcam Servo servoB; // definisce oggetto servo per luci //Variabili di controllo //int RobotMode = 0; //const int corr = 119; // velocità iniziale motore Right //const int corl = 103; // velocità iniziale motore Left float corr = 121; float corl = 101.20; int IRpin = A0; // pin analogico per sensore sharp (Ir) int enableRight = 3; // Pin abilita/disabilita (PWM) motore Right int enableLeft = 6; // Pin abilita/disabilita (PWM) motore Left int directionRight = A2; // Pin rotazione motore RIGHT - pin analogico usato in modalità OUTPUT int directionLeft = A1; // Pin rotazione motore LEFT - pin analogico usato in modalità OUTPUT Ultrasonic ultrasonicRight(12,13); //Sensore laterale destro Trigger and Echo (in ordine) Ultrasonic ultrasonicLeft(8,11); //Sensore laterale sinistro Trigger and Echo (in ordine) int dR; //Variabile distanza laterale destra int dL; //Variabile distanza laterale sinistra // Listen sulla porta di default 5555, il webserver su Yun // forward di tutte le pagine memorizzate YunServer server; String readString; void setup() { Serial.begin(9600); //velocità di comunicazione Bridge dist.begin(2,5); // pins per sonar Echo AND Trigger (rispettivamente) neckServo.attach(10); // settaggio servo al pin 10 neckServo.write(90); // centraggio servo a 90° servoA.attach(7); // settaggio servo al pin 7 servoA.write(90); // centraggio servo a 90° servoB.attach(9); // settaggio servo al pin 9 servoB.write(90); // settaggio servo a 90° //settaggio pin controllo motori come out pinMode(enableRight, OUTPUT); digitalWrite(enableRight, LOW); //tiene basso l'uscita - motore off pinMode(enableLeft, OUTPUT); digitalWrite(enableLeft, LOW); //tiene basso l'uscita - motore off pinMode(directionRight, OUTPUT); pinMode(directionLeft, OUTPUT); // settaggio pin 4 per illuminazione campo visivo webcam pinMode(4, OUTPUT); digitalWrite(4, LOW); Bridge.begin(); // Bridge startup // In attesa di un evento dalla pagina Web server.listenOnLocalhost(); server.begin(); } void loop() { webpagecommand(); //E' stato premuto un pulsante sulla pagina Web? distanza(); // legge distanza da eventuali ostacoli - Sensore centrale e laterali lowostacle(); // legge distanza da ostacoli a livello superficie - Sensore Sharp if(distance < stopDist){ stopBot(); // suona(); //era previsto un Beep ma la libreria Tone va in conflitto con la servo library lookAround(); //il sensore centrale su servo compie una panoramica e misura il campo visivo // cercando una via di fuga favorevole (la distanza misurata più lunga) if(distArray[0] <= stopDist && distArray[1] <= stopDist){ reverse(); delay(750); // in origine il valore è 500 spinLeft(); delay(750); forward(); } else if(distArray[0] <= distArray[1] && distArray[1] > stopDist){ reverse(); delay(270); // in origine 260 forwardRight(); delay(500); forward(); } else if(distArray[0] > distArray[1] && distArray[0] > stopDist){ reverse (); delay(270); // in origine 260 forwardLeft(); delay(500); forward(); } else if(distArray[0] <= distArray[1] && distArray[1] <= stopDist){ reverseLeft(); delay(500); forward(); } else if(distArray[0] > distArray[1] && distArray[1] <= stopDist){ reverseRight(); delay(500); forward(); } } } // chiude la funzione loop() void distanza() { delay(25); distance = dist.getDistanceCentimeter(); //delay(25); if (distance < 0){ // correzione in caso di distanza negativa distance = 666; } delay(80); dR = ultrasonicRight.Ranging(CM); if (dR < 14.5) { sensorLeft(); dR = 100; } delay(80); dL = ultrasonicLeft.Ranging(CM); if (dL < 15) { sensorRight(); dL = 100; } } void lowostacle() { float volts = analogRead(IRpin)*0.00322265625; // valore dal sensore * (5/1024 - ovvero 10 bit) - se alimentato a 3.3.volts cambiare da 5 a 3.3 float IRdistance = 65*pow(volts, -1.10); // (0.0048828125)inserire il valore tra parentesi al posto dell'esistente NumeroCasuale = random(1,3); //Estrae un numero a caso //Serial.println(IRdistance); // stampa la distanza rilevata - un valore di 50 equivale a 5 cm (4 cm distanza minima) if (IRdistance < 50 && NumeroCasuale == 1) { //la funzione random rende casuale il comportamento IRdistance = 200; reverse(); delay (200); spinLeft(); // in modo da evitare loop infiniti delay (250); //500 valore init // in quanto vi è un solo sensore Ir centrale (e non sui lati destro - sinistro) forward(); } else if (IRdistance < 50 && NumeroCasuale > 1){ IRdistance = 200; reverse(); delay (200); spinRight(); delay (250); forward(); } } void webpagecommand() { // Get dalla pagina web del client - server in attesa YunClient client = server.accept(); // Questa è una richiesta dal computer? if (client) { // legge il comando String command = client.readString(); command.trim(); //kill spaziovuoto Serial.println(command); if (command == "accendi") { forward(); } else if (command == "spegni") { stopBot(); } if (command == "sinistra") { forwardLeft2(); } if (command == "destra") { forwardRight2(); } if (command == "indietro") { secondreverse(); } if (command == "camerapan") { stato = 1 - stato; conta = 1; stopBot(); // ferma il robot e compie una panoramica 75° a sinistra e destra movimentocam(); // stato = 0; } if (command == "accelera") { corr = (corr + accedecelera); corl = (corl + accedecelera); forward(); } if (command == "decelera") { corr = (corr - accedecelera); corl = (corl - accedecelera); forward(); } if (command == "ruotaleft") { spinRight(); delay(325); //batteria Low 650 forward(); } if (command == "ruotaright") { spinLeft(); delay(355); //batteria Low 710 forward(); } if (command == "lucion") { digitalWrite(4, HIGH); } if (command == "lucioff") { digitalWrite(4, LOW); } // Chiude le connessioni e tutte le risorse libere. client.stop(); } delay(50); // Poll ogni 50ms e ripete il Loop } void lookAround() //ci siamo infilati in un angolo? Il sonar misura la distanza e trova la via libera { int pos; for(pos = 30; pos <= 150; pos += 1) // va da 30 gradi a 150 gradi un grado per volta { neckServo.write(pos); // muove il servo nella posizione contenuta in 'pos' delay(15); if(pos == 45){ delay(500); // in origine 1000 distArray[0] = dist.getDistanceCentimeter(); // correzione per distanze negative o inesatte if(distArray[0] < 0){distArray[0] = 444;} // in origine 500 (anche sotto) } if(pos == 135){ delay(500); distArray[1] = dist.getDistanceCentimeter(); if(distArray[1] < 0){distArray[1] = 444;} } } neckServo.write(90); // servo posizione centrale // testing -- legge distanza accuratamente su monitor seriale (se occorre in fase di progettazione) //delay(100); //distanza(); //delay(50); // Serial.print("\nLeft: "); // Serial.print(distArray[0]); // Serial.print("\nRight: "); // Serial.print(distArray[1]); delay(100); // 200 in origine } // Robot - Controlli direzionali void forward() { analogWrite(enableRight, corr); analogWrite(enableLeft, corl); digitalWrite(directionRight, HIGH); digitalWrite(directionLeft, HIGH); } void forwardRight() { digitalWrite(enableRight, LOW); //motore Right fermo analogWrite(enableLeft, 225); //settaggio alla massima velocità digitalWrite(directionLeft, HIGH); //motore Left avanti } void forwardLeft() { analogWrite(enableRight, 225); //settaggio alla massima velocità digitalWrite(directionRight, HIGH); //motore Right avanti digitalWrite(enableLeft, LOW); //motore Left fermo } void reverse() { //Motori indietro tutta digitalWrite(directionRight, LOW); digitalWrite(directionLeft, LOW); analogWrite(enableRight, 255); analogWrite(enableLeft, 248); } void secondreverse() { digitalWrite(directionRight, LOW); digitalWrite(directionLeft, LOW); analogWrite(enableRight, 200); analogWrite(enableLeft, 194); delay (200); digitalWrite(directionRight, HIGH); digitalWrite(directionLeft, LOW); analogWrite(enableRight, 255); analogWrite(enableLeft, 255); delay (562); //low battery 1125 analogWrite(enableRight, LOW); analogWrite(enableLeft, LOW); //int RobotMode = 0; } void reverseRight() { digitalWrite(enableRight, LOW); //motore Right fermo analogWrite(enableLeft, 225); digitalWrite(directionLeft, LOW); //motore Left indietro massima velocità } void reverseLeft() { analogWrite(enableRight, 225); digitalWrite(directionRight, LOW); //motore Right indietro massima velocità digitalWrite(enableLeft, LOW); // motore Left fermo } void spinLeft() { //entrambi i motori a velocità sostenuta analogWrite(enableRight, 225); digitalWrite(directionRight, HIGH); //avanti Right analogWrite(enableLeft, 225); digitalWrite(directionLeft, LOW); //indietro Left } void spinRight() { //entrambi i motori a velocità sostenuta analogWrite(enableRight, 225); digitalWrite(directionRight, LOW); //indietro Right analogWrite(enableLeft, 225); digitalWrite(directionLeft, HIGH); //avanti Left } void stopBot() // Spegne entrambi i motori { digitalWrite(enableRight, LOW); digitalWrite(enableLeft, LOW); // int RobotMode = 0; } void PlayBot() { analogWrite(enableRight, corr); analogWrite(enableLeft, corl); digitalWrite(directionRight, HIGH); digitalWrite(directionLeft, HIGH); // int RobotMode = 1; } void forwardRight2() { digitalWrite(enableRight, LOW); //motore Right fermo analogWrite(enableLeft, 180); digitalWrite(directionLeft, HIGH); //motore Left avanti delay(350); forward(); } void forwardLeft2() { digitalWrite(enableLeft, LOW); //motore Left fermo analogWrite(enableRight, 197); //settaggio alla massima velocità digitalWrite(directionRight, HIGH); //motore Right avanti delay(350); forward(); } void sensorLeft() { stopBot(); delay(150); digitalWrite(directionLeft, LOW); //effettua breve retromarcia poi evita l'ostacolo analogWrite(enableLeft, 101.10); digitalWrite(directionRight, LOW); analogWrite(enableRight, 121); delay(375); //750 stopBot(); delay(150); digitalWrite(directionRight, LOW); //motore Right indietro analogWrite(enableRight, 187); analogWrite(enableLeft, 170); digitalWrite(directionLeft, HIGH); //motore Left avanti delay(250); // 500 forward(); } void sensorRight() { stopBot(); delay(150); digitalWrite(directionLeft, LOW); //effettua breve retromarcia poi evita l'ostacolo analogWrite(enableLeft, 101.10); digitalWrite(directionRight, LOW); analogWrite(enableRight, 121); delay(375); stopBot(); delay(150); digitalWrite(directionLeft, LOW); //motore Left indietro analogWrite(enableLeft, 170); analogWrite(enableRight, 187); digitalWrite(directionRight, HIGH); //motore Right avanti delay(250); forward(); } void slowforward() //se serve un retromarcia più dolce.... { } void movimentocam() { if (conta > 200 && grado == 90){ conta = 0 - conta; servoA.write(90); servoB.write(90); stato = 0; // forward(); } if ( angolo > limitAngolo ) { angolo = 0; } grado = (( sin( (angolo/rad2grad) ) * angEnd ) + 90 ); servoA.write( grado ); servoB.write( grado ); delay(40); angolo = (angolo + incremento ); if (conta > 0 && grado > 10) { conta ++; //slowforward(); movimentocam(); } } |
| Elenco revisioni | |
|
7/6/2015 |
Emissione preliminare |