![]()
Turtle - 2WD Mobile Platform
ultimo aggiornamento 3 ottobre 2015
|
Base per robot Turtle - 2WD Mobile Platform ultimo aggiornamento 3 ottobre 2015 |
|
|
|
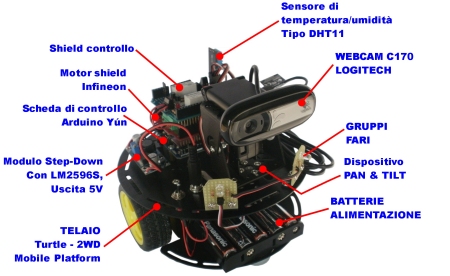
La Turtle - 2WD Mobile Platform è una
piattaforma robotica prodotta dalla
DFRobots.
Il kit è costituito da un corpo in alluminio, due motoriduttori, due
ruote Tamiya racing (diametro 65 mm), un ballcaster in metallo, un
deviatore, un presa di alimentazione, le viti e i dadi.
Può essere equipaggiata con schede Arduino o similari e permette di
realizzare in modo semplice e veloce dei robot completi.
|
Manuale di montaggio |
|
Caratteristiche principali
| Materiale telaio: | Alluminio |
| Dimensioni: | 170 mm (diametro) |
| Peso: | 400g |
| Numero motoriduttori: | 2 |
| Dimensioni motoriduttori | 55 x 48,3 x 23 mm, peso 45 grammi |
| Rapporto di riduzione: | 120:1 |
| Velocità: | 180 rpm a 6 Vdc (70 cm/s) |
| Alimentazione motori: | da 3 a 6 Vdc |
| Assorbimento a 6 Vdc: | 71 mA (470 mA in stallo). |

Esempio di utilizzo del kit
|



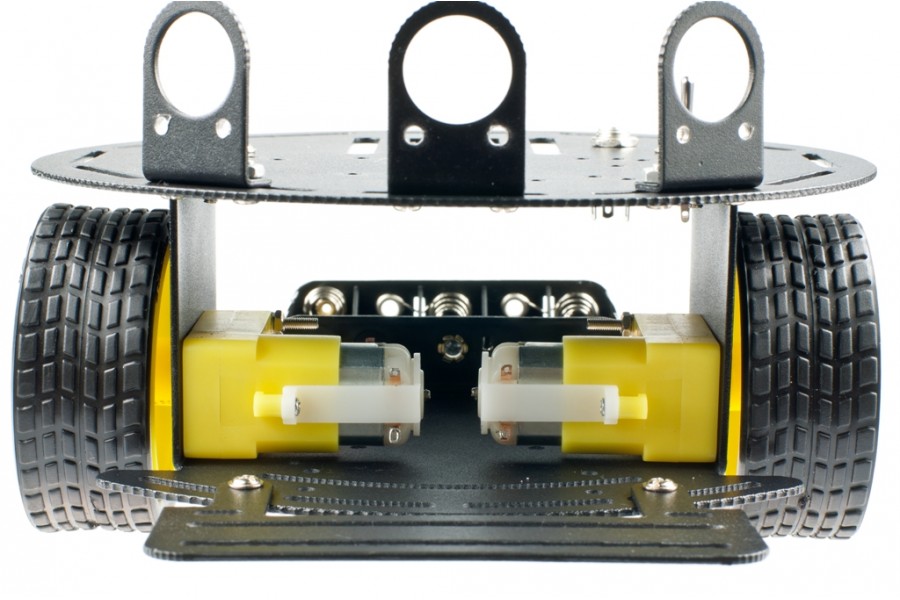
Motoriduttori
All’interno del kit della base robotica sono presenti due motoriduttori con motore a corrente continua con un’uscita di180rpm se alimentati a 6V.

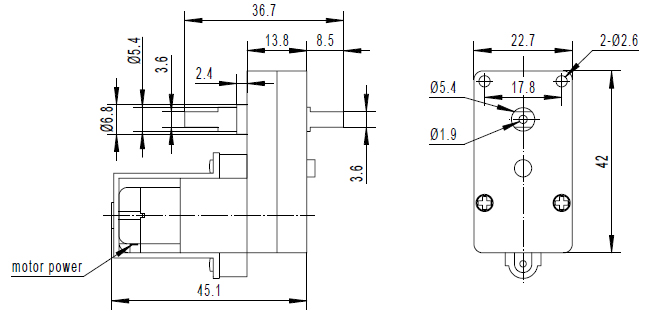
Caratteristiche Elettriche:
Tensione di funzionamento: 3 ~ 7.5V (6V nominale);
Max. A vuoto Corrente (3V): 140 mA (3V) - 170 mA (6V)
Velocità a vuoto (3V): 90 rpm (3V) - 160 rpm (6V);
Max. Coppia di uscita: 0.8 kgf.cm;
Max. corrente di Stallo: 2,8 A.
Condizioni Operative:
Carico stimato: 0,2 kgf.cm;
Temperatura di funzionamento: -10 ~ + 60 ℃;
Tipo motore: 130.
Caratteristiche meccaniche:
Modalità uscita: 2 lati;
Rapporto di trasmissione: 1:120;
Max. Diametro Asse di uscita: 5,4 millimetri;
Peso netto: 45 g.
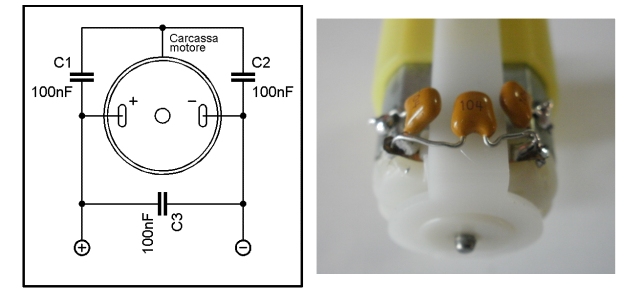
NOTA: Per ridurre le
interferenze con la circuiteria elettronica causate dallo scintillio dovuto allo
sfregamento delle spazzole del motore elettrico sul collettore, è necessario
saldare tre condensatori ceramici (o meglio multistrato) da 100nF uno tra
positivo e carcassa, uno tra negativo e carcassa e uno tra positivo e negativo.
Nella Figura è visibile lo schema di collegamento dei condensatori utilizzati
come filtri antidisturbo.
| Elenco revisioni | |
|
03/10/2015 |
Aggiornato pagina |
|
14/03/2015 |
Emissione preliminare |

