ARDUINO
Infineon motor
Shield
Ultimo aggiornamento 3 settembre 2015
|
|
ARDUINO |
|
|
|
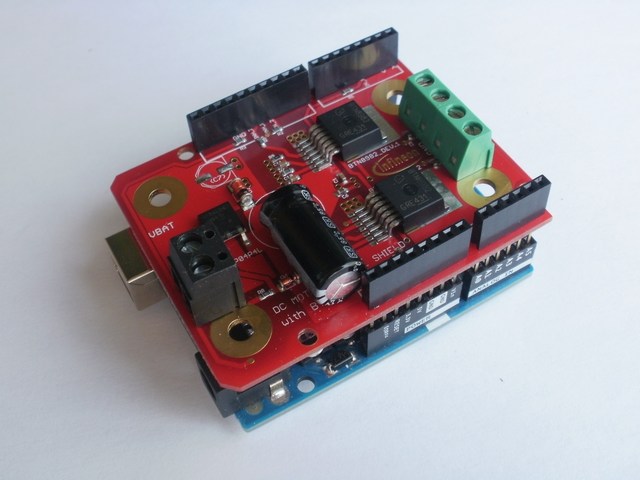
Il
DC Motor Control Shield di
Infineon è uno dei primi per uscita ad alta corrente ed è
compatibile sia con Arduino nonché la scheda XMC1100 di Infineon
La scheda è in grado di pilotare due motori DC in modo
unidirezionale (configurazione a mezzo ponte) o un motore DC
bidirezionale (configurazione H-Bridge)Il ponte H è realizzato
utilizzando due integrati
BTN8982TA NovalithIC ™ che possono
essere controllati da un segnale PWM tramite il Pin IN.
Interfacciamento ad un microcontrollore è reso facile dalla
integrato che dispone di ingressi a livello logico, diagnosi con
senso corrente, la regolazione del slew rate, la generazione di
tempi morti e la protezione contro la sovratemperatura,
sottotensione, sovracorrente e cortocircuito.

Le caratteristiche del DC Motor Control Shield con BTN8982TA per
Arduino sono:
compatibilità totale con Arduino UNO R3 e con l’XMC1100 Boot Kit;
funzioni PWM, e.g. 30 kHz;
Slew Rate modificabile per EMI ottimizzato tramite resistori esterni;
diagnosi con current sense;
protezione da sovraccarichi o temperature eccessive.
Tra le applicazioni ci sono i motori brushed DC motor control fino a 250W con tensione di alimentazione nominale pari a 8–18V (con un massimo di 6–40V), e corrente media pari a 30 A (BTN8982 ha una limitazione in corrente @55 A).
|
|
La scheda può essere
acquistata sul
sito Farnel
DCMOTORCONTRBTN8982TOBO1 al costo di 25,79 + IVA e
Trasporto, sulle stesso sito si trova anche l'integrato
BTN8982TA al costo di 5,75 + IVA e Trasporto.
Citazione:
Per utilizzi della scheda potete leggere i seguenti articoli
pubblicati su
Elettronica
Open Source:
Link utili:


Lo shield presentato in questa pagina mi è stato inviato in quanto il progetto da me proposto si è classificato tra i 20 vincitori del Contest proposto da Elettronica Open Source,

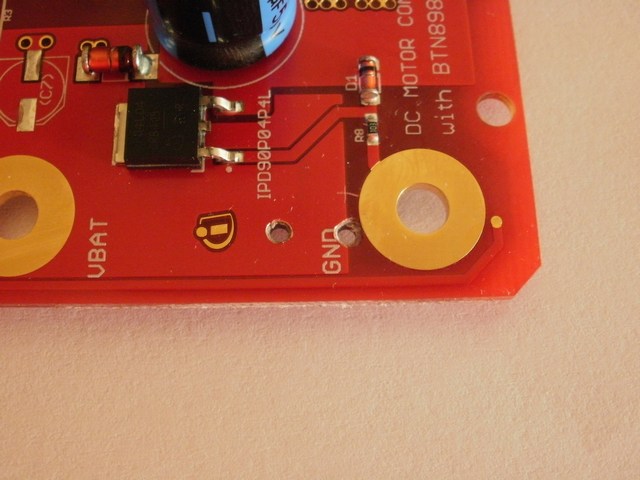
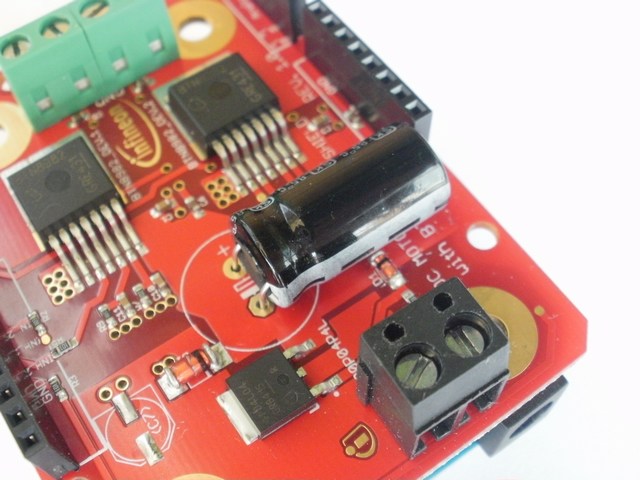
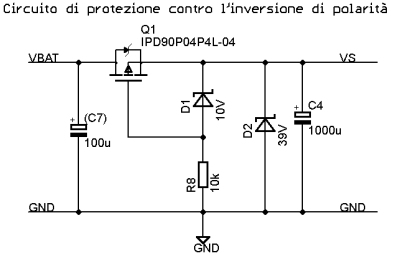
Circuito per la protezione contro l’inversione di polarità
Il circuito di protezione contro l’inversione della polarità è formato dal mosfet Q1 tipo IPD90P04P4L, prodotto dalla stessa Infineon, questi è un mosfet di potenza canale P, la qui polarizzazione è realizzata dalla resistenza R8 e dallo zener D1, mentre la tensione di alimentazione è limitata nel suo valore massimo tramite lo zener D2 da 39 V, il condensatore elettrolitico C4 da 1000uF è necessario per mantenere basso il ripple della tensione VS durante la commutazione.
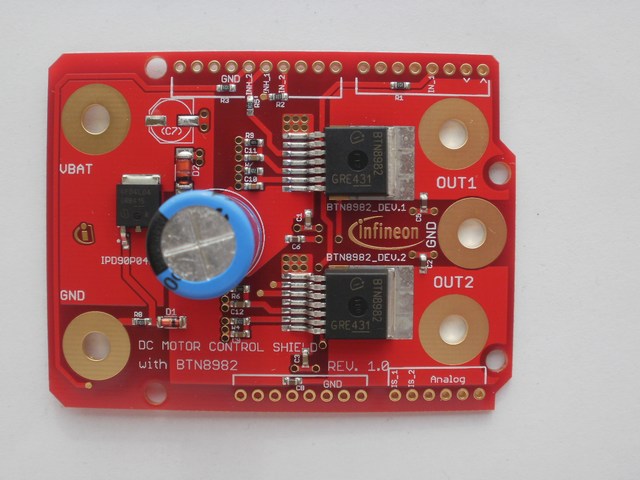
Il cuore della scheda è rappresentato da due
integrati tipo
BTN8982TA: si tratta di un integrato semiponte H, il
circuito interno è formato da un MOSFET canale P e un MOSFET a canale N più il
relativo circuito driver.
Il circuito è facile da controllare, poiché è sufficiente applicare segnali di
livello logico al pin IN e INH.

Quando si applica un segnale PWM al pin IN, la
corrente fornita al motore, può essere controllata tramite il duty cycle del PWM.
Con un resistore collegato esternamente tra il pin SR e GND è possibile regolare
la velocità di risposta, o slew rate.

Le principali caratteristiche dell’integrato sono:
• Tensione d’ingresso nominale 8-18 V (max. 6 - 40 V);
• Possibilità di controllo motori Brushed DC fino a 250 W con carico continuo
• Unità per il controllo sia di un motore DC bidirezionale con spazzole o di due
motori a corrente continua unidirezionali;
• Corrente media pari a 30 A (BTN8982 ha una limitazione in corrente @55 A), il
limite è dato dalla dissipazione del PCB;
• Alta frequenza PWM, per esempio 30 kHz;
• Slew Rate modificabile per EMI ottimizzato tramite resistori esterni;
• Circuito del driver con ingressi a livello logico;
• Protezione da sovraccarichi o temperature eccessive;
• Diagnosi con current sense, protezione da sovratemperatura e sovracorrente;
• Lo shield presenta già i collegamenti con i pin di controllo.
|
|||||||||||||||||
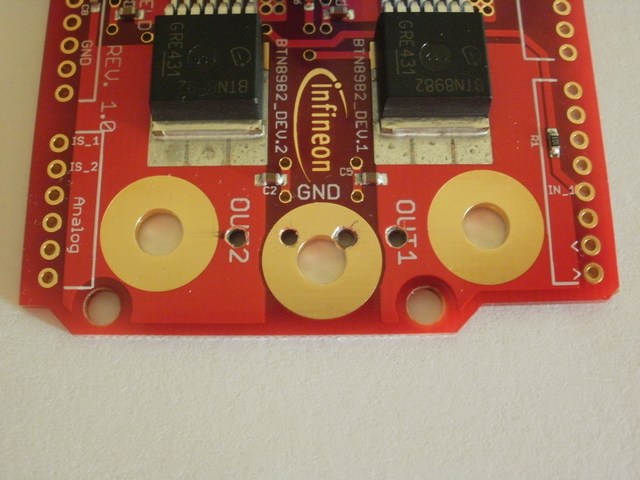
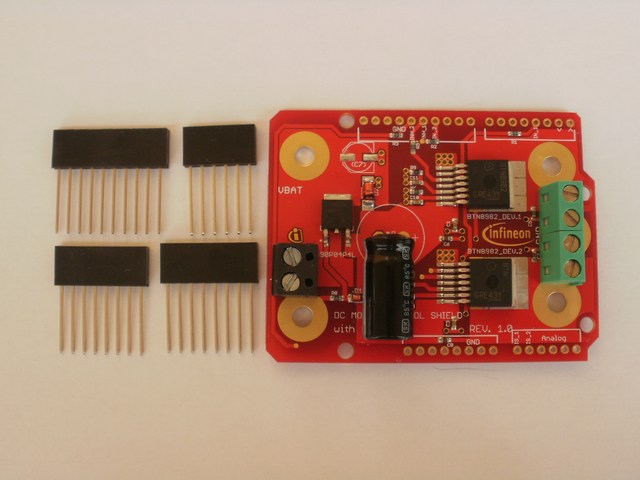
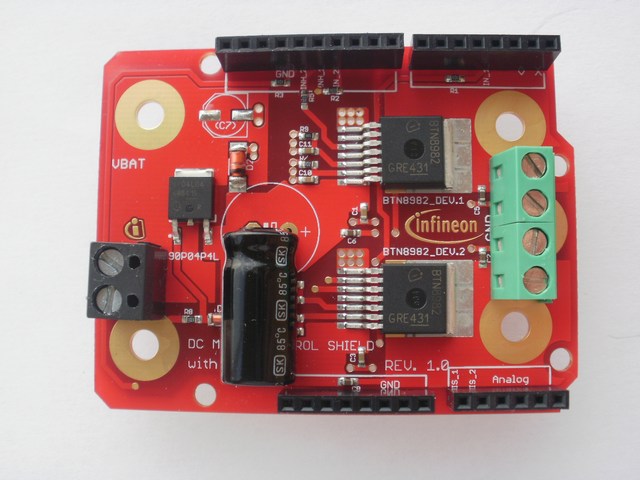
ll DC Motor Control Shield di Infineon presenta sullo stampato delle grosse piazzole per il collegamento della fonte d'alimentazione denominate VBAT e GND e per il collegamento del motore denominate OUT1, OUT2 e GND.
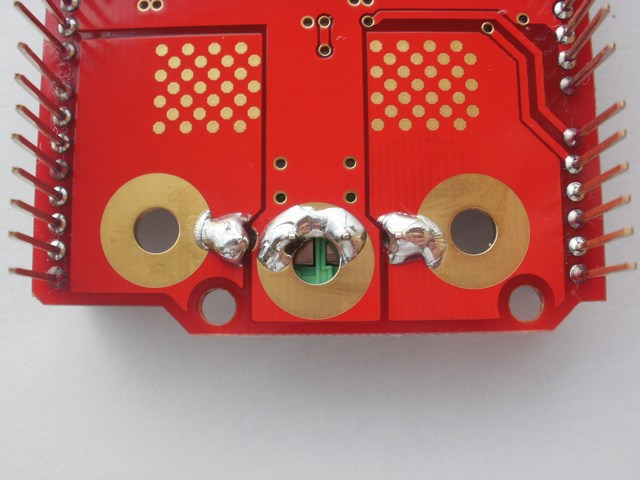
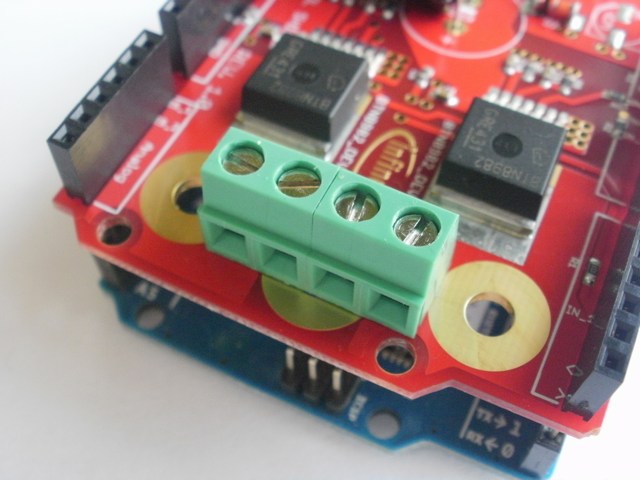
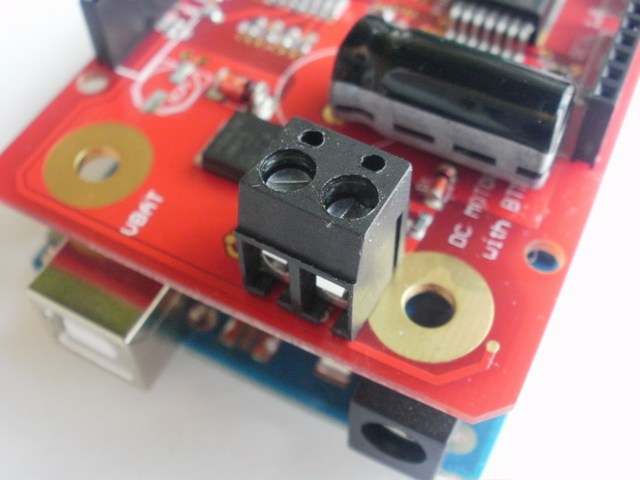
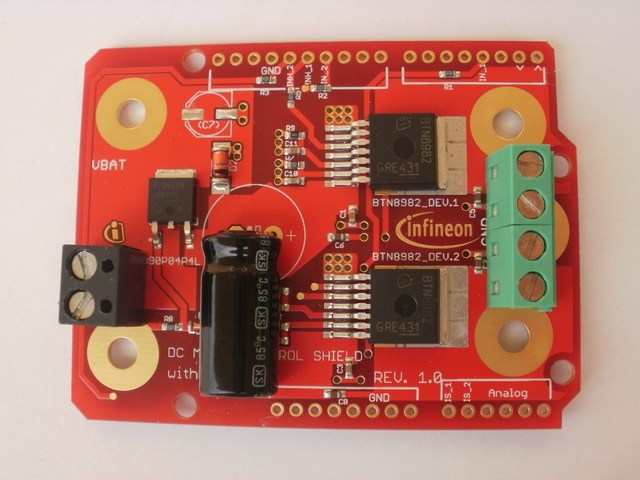
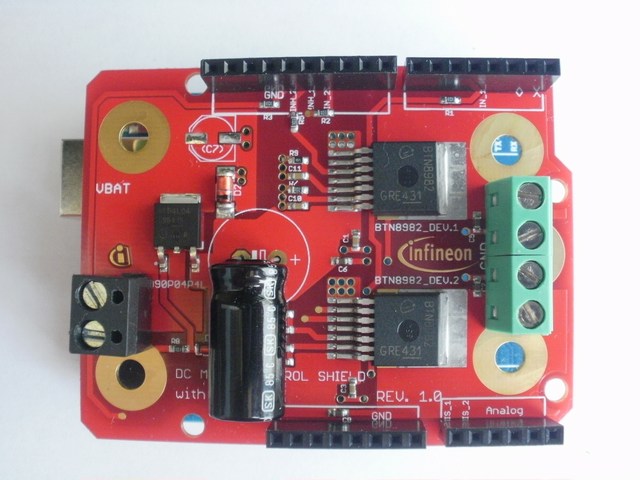
Per utilizzare queste occorrerebbe utilizzare delle boccole da pannello e relative banane, per ridurre l'ingombro è possibile utilizzare delle morsettiere, ma per fare questo occorre procedere alla modifica dello shield come è mostrato nelle foto sottostanti



|
||||||||||||||||||||||||||||||
Alcuni dettagli dello shield
|
|||||||||||||||||||||||||||||||||||||

Schema della scheda

Utilizzo dello shield con Arduino
Controllo singolo motore bidirezionale
Per utilizzare un unico motore bidirezionale con lo shield, effettuare le seguenti operazioni:
collegare il motore a OUT1 e OUT2
collegare un alimentatore a VBAT e GDN
set INH1 e INH2 a HIGH
utilizzare IN1 per la direzione 1, IN2 per la direzione 2
Controllo due motori unidirezionali
Per utilizzare un due motori unidirezionali con lo shield, effettuare le
seguenti operazioni:
collegare il motore 1 a OUT1 e GND, il motore 2 OUT2 e GND
collegare un alimentatore a VBAT E GDN
set INH1 e INH2 a HIGH
utilizzare IN1 per controllare il motore 1, IN2 per il motore 2
Esempio di programma gestione Arduino
![]()
/*Sketch to ddrive Brushed DC-Motor in two directions*/ #define IS_1 0 #define IS_2 1 #define IN_1 3 #define IN_2 11 #define INH_1 12 #define INH_2 13 #define TCONST 100 //Delay Time between Steps int Motor_DC = 0; // actual DC int Motor_DC_MAX = 60; // 50% Dutycycle int i = 0; void setup() { // put your setup code here, to run once: pinMode(IN_1,OUTPUT); pinMode(IN_2,OUTPUT); pinMode(INH_1,OUTPUT); pinMode(INH_2,OUTPUT); reset_ports(); digitalWrite(INH_1,1); digitalWrite(INH_2,1); } void fade_Motor(int port) { for(i = 0; i< Motor_DC_MAX; i++) { Motor_DC = map( i , 0 , 100 , 0 , 255 ); analogWrite( port , Motor_DC ); delay(TCONST); } //Slow down Motor for(i = Motor_DC_MAX; i>= 0; i--) { Motor_DC = map( i , 0 , 100 , 0 , 255 ); analogWrite( port , Motor_DC ); delay(TCONST); } } //Alle IOs zurücksetzen void reset_ports() { digitalWrite(IN_1,0); digitalWrite(IN_2,0); } void loop() { //Fade Motor in forward direction fade_Motor(IN_2); //Wait and Stop reset_ports(); delay(1000); //Wait for 1s //Fade Motor in backward direction fade_Motor(IN_1); //Wait and Stop reset_ports(); delay(1000); //Wait for 1s } |
| Elenco revisioni | |
| 03/09/2015 | Inserito citazioni della scheda su articoli pubblicati su Elettronica Open Source: |
|
07/06/2015 |
Inserito foto modifica shield |
|
23/05/2015 |
Emissione preliminare |