![]()


ultimo aggiornamento 30 agosto 2014
|
ultimo aggiornamento 30 agosto 2014 |
|
|
|
| Il
robot Robi
è
dotato di
20 gradi di libertà e altrettanti servomotori tipo RS308MD (scheda
tecnica), questi sono stati sviluppati e adattati appositamente
dall’azienda giapponese
Futaba Corporation Il primo servomotore è allegato al fascicolo n° 3 Per il collegamento alla scheda di controllo sono utilizzati dei speciali cavetti dotati di appositi mini connettori, la lunghezza dei cavi è di tre tipologie: 70, 135 e 200 mm.
|
|

Tabella servomotori robot Robi
Per il funzionamento di
Robi ad ogni servomotore deve essere assegnato un numero di di ID, per Robi sono
stati utilizzati i numeri da 2 a 21.
* Nota: il numero del fascicolo è riferito all'edizione giapponese.
|

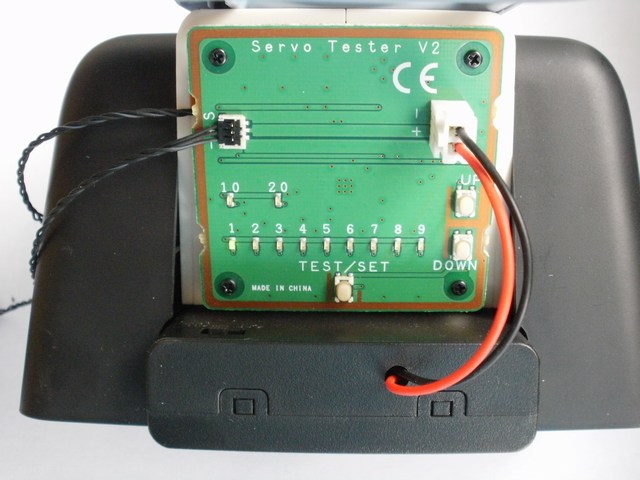
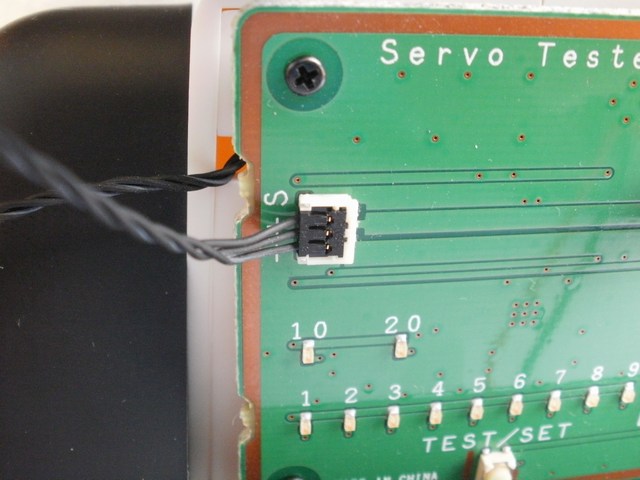
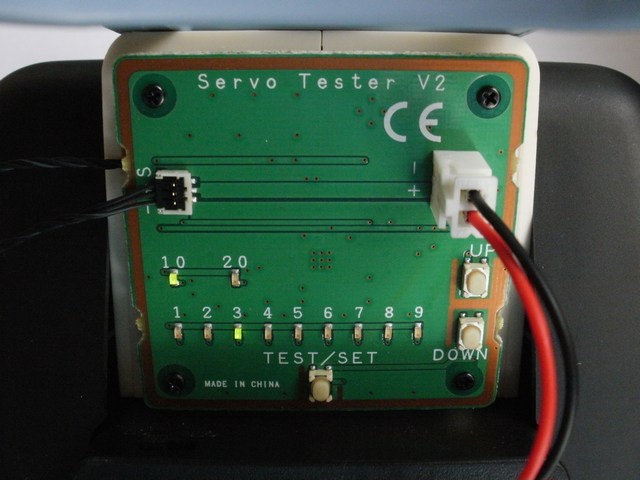
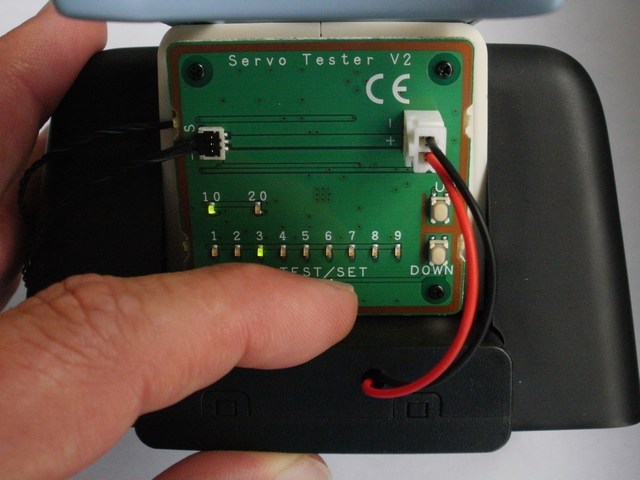
COME TESTARE E ASSEGNARE IL NUMERO DI ID AD UN SERVOMOTORE
|
|||||||||||||||||||||||||||||||||||||||||
Dettaglio della scheda di controllo della scheda servo
Cuore della scheda di controllo del servomotore RS308MD della giapponese Futaba Corporation è il processore prodotto dalla Silicon Labs tipo F332

| Processore F332 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |

 |
 |
 |
 |
| Integrato di controllo F332 | Integrato regolatore 3,3V | Transistor di pilotaggio motore | Integrato ?? |

| Elenco revisioni | |
| 30/08/2014 | Inserito foto della sequenza di assegnazione del codice ID |
| 15/06/2014 | Inserito tabella riassuntiva servomotori, informazioni su processore |
| 14/03/2014 | Inserito filmato di collaudo servomotore |
| 02/03/2014 | Inserito foto scheda controllo servo Futaba |
| 25/01/2014 | Emissione preliminare |