![]()
![]()
![]()
ultimo aggiornamento
1 aprile 2008
|
|
|
|
|
|
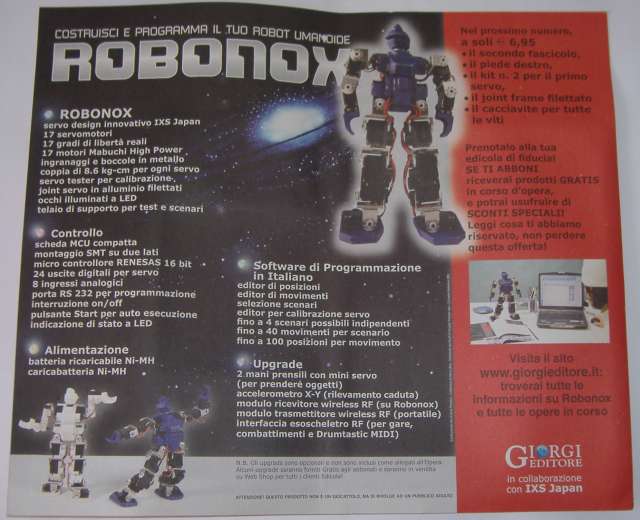
Robonox è un robot umanoide
prodotto e distribuito dalla casa editrice a
partire dal 2 gennaio 2007
Con la consegna dei fascicoli da 31 a 38
l'editore ha comunicato che i fascicoli restanti saranno spediti in un unica
spedizione.
|

Immagini
del primo fascicolo dell'opera
|
|---|
| Indice |
| Meccanica: Quasi tutta la meccanica di questo robot è costituita dall'insieme di 17 servomotori (design innovativo IXS Japan) che conferiscono a Robonox 17 gradi di libertà.
|
![]()
|
Scheda di controllo: Il controllo del robot è affidato alla scheda RMC Micro Renesas ed è inclusa nella schiena, sotto alla batteria. Presenta queste caratteristiche:
Tools di programmazione della scheda
di controllo |
![]()
|
Alimentazione: |
![]()
Software di
programmazione in Italiano:
|
![]()
| Upgrade: Gli upgrade sono opzionali e non sono inclusi come allegati all'opera. Possono essere comprati sulla sezione Web Shop del sito di Robonox; alcuni di questi verranno forniti gratis agli abbonati.
Moduli previsti nella prima fase e poi non realizzati
|
![]()
Riepilogo sintetico dei componenti forniti nel corso dell'opera:
|
![]()
|
Contenuto dei fascicoli:
|
![]()
|
|---|
| Elenco revisioni | |
| 01/04/2008 | Aggiornato pagina |
| 17/03/2008 | Inserito foto del materiale del Robobox |
| 03/12/2007 | Inserito link con lettera editore. |
| 26/01/2007 | Eliminata sezione fascicoli, spostata in apposita pagina |
| 09/01/2007 | Emissione preliminare |
![]()