ultimo aggiornamento il 26 novembre 2011
|
ultimo aggiornamento il 26 novembre 2011 |
|
|
|
|
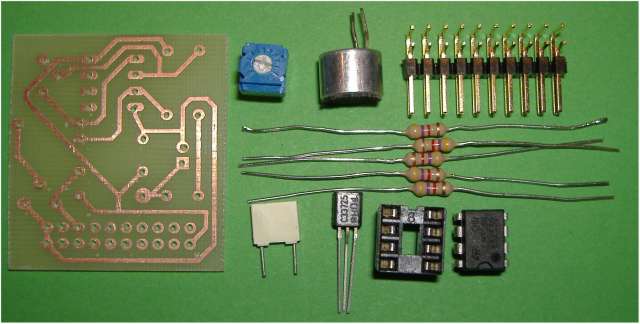
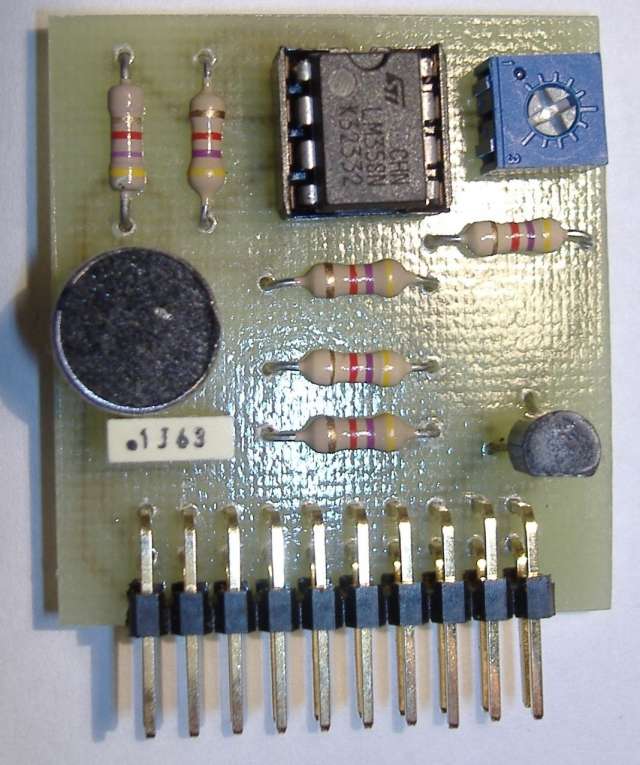
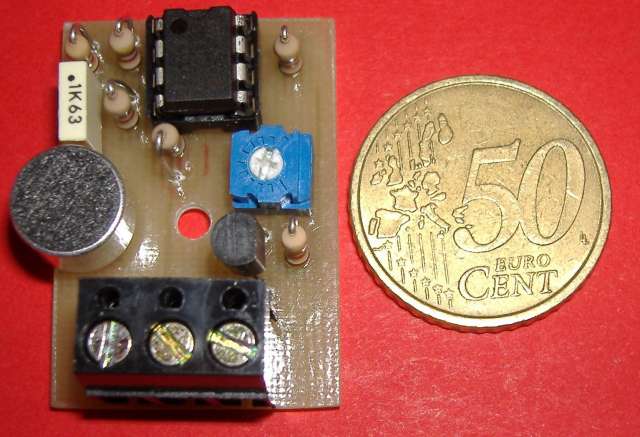
Quella visibile nelle foto a lato è un piccolo modulo (la dimensione della basetta maggiore è di circa 3 cm di lato) che installato sulla scheda BS2 della DeAgostini permette di comandare il robot tramite i suoni o rumori.
La base del circuito è presa dal sito della De Agostini. |
|
|
|
|
|
|

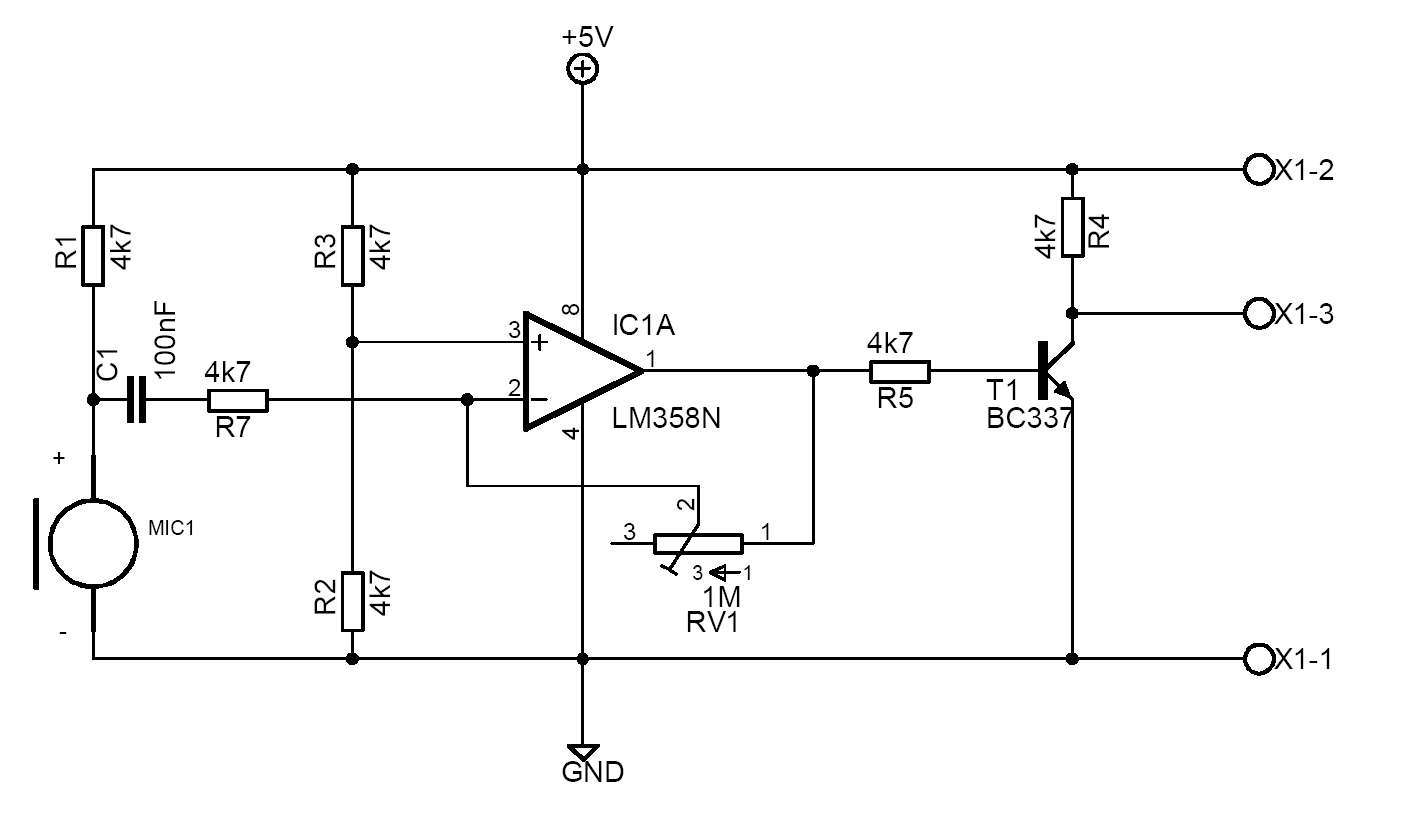
Sensore versione normale

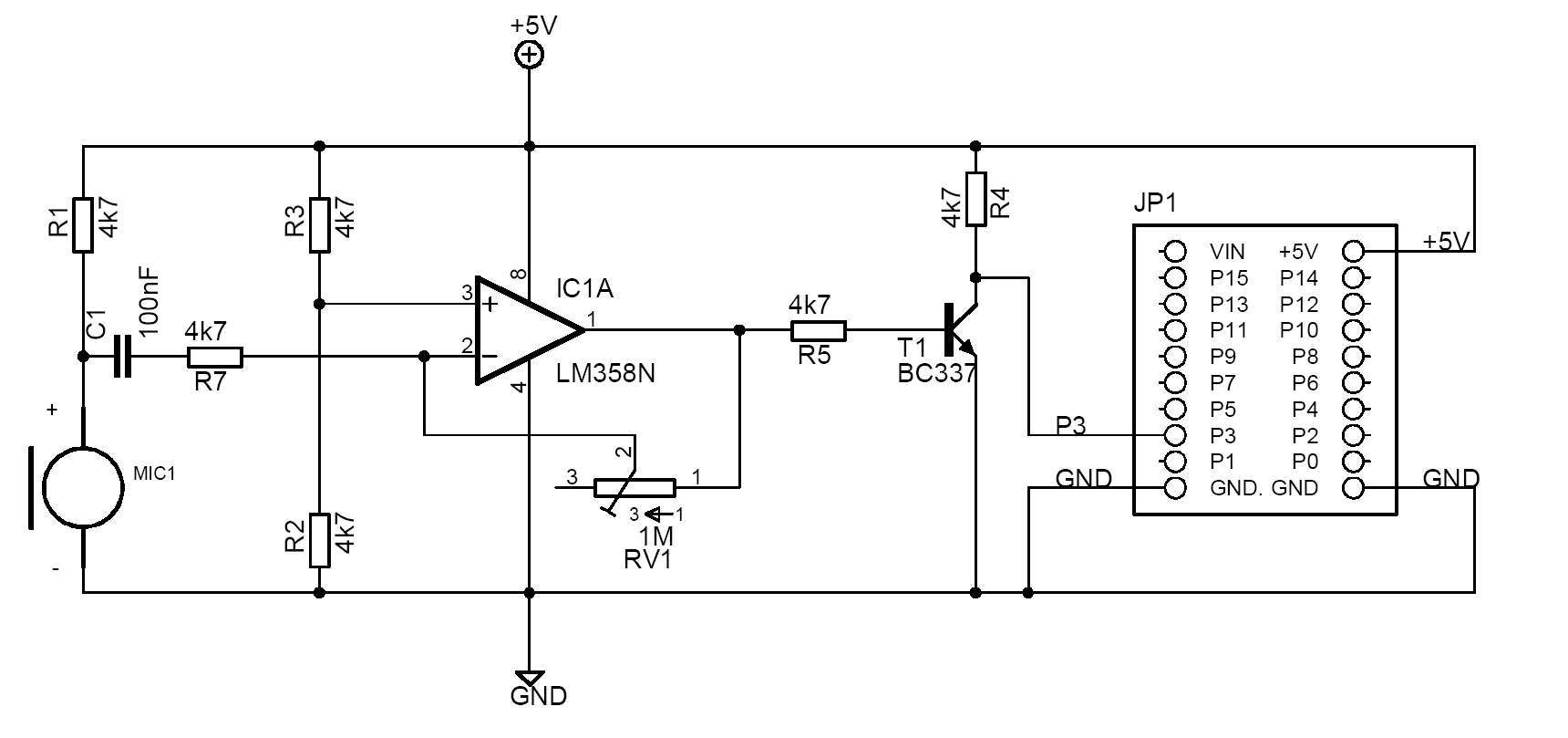 |
Lista componenti: R1-2-3-4-5 = 4,7kohm
1/4W |
|
 Per scaricare il circuito per Programma EAGLE |
Per scaricare il circuito in Formato PDF |
|
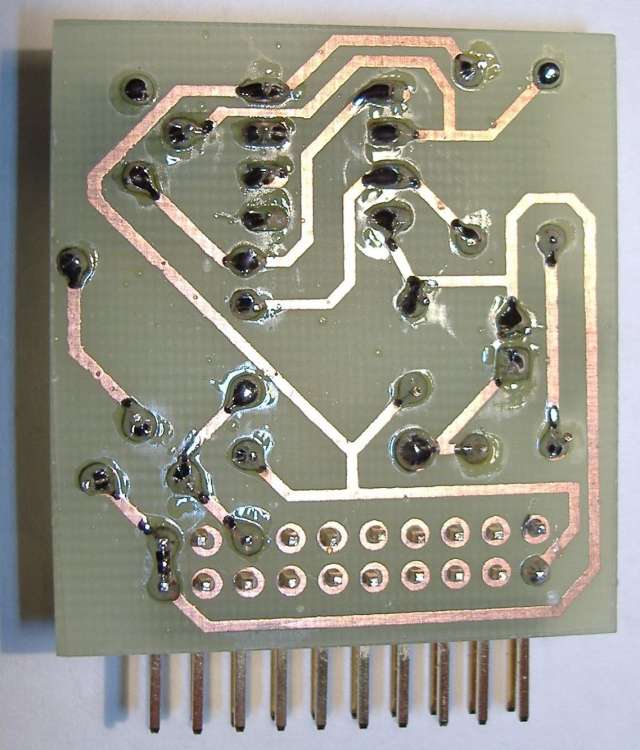
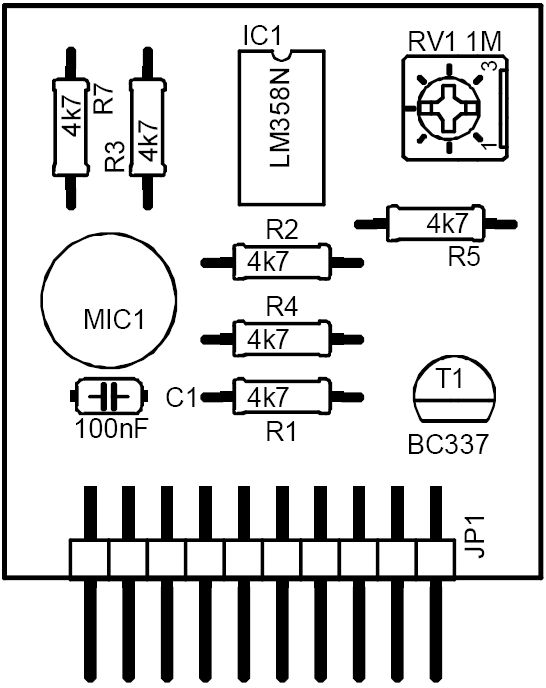
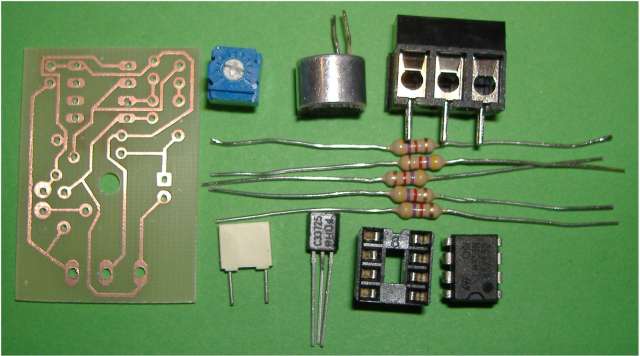
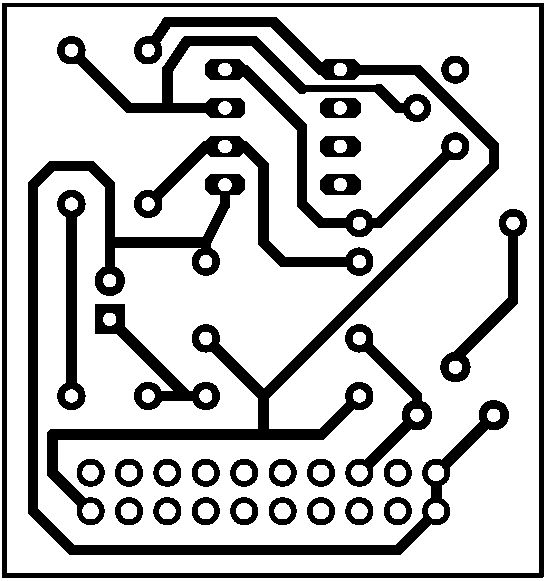
Circuito stampato e disposizione componenti sensore normale
 |
 |
 |
 |

Fase di collaudo del sensore
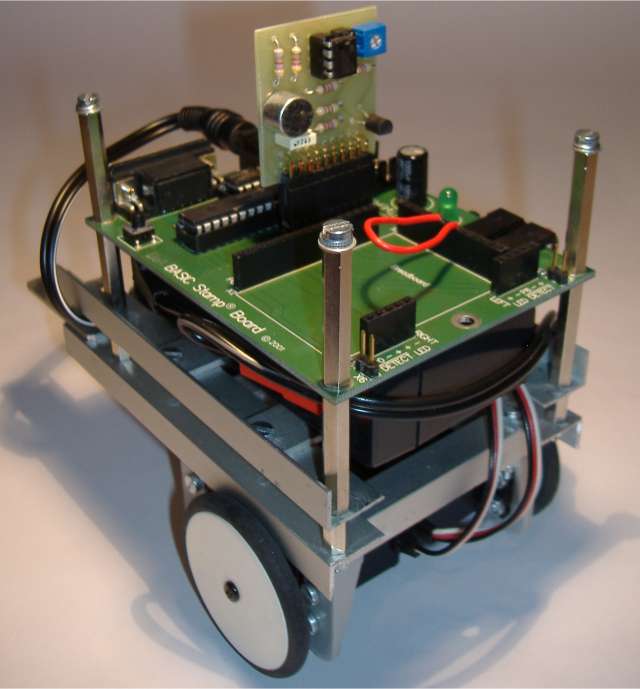
Collaudo del sensore con il robot Robby
Sensore versione ridotta

 |
Lista componenti: R1-2-3-4-5 = 4,7kohm
1/4W |
|
|
Per scaricare il circuito per Programma EAGLE |
Per scaricare il circuito in Formato PDF |
|
Circuito stampato e disposizione componenti sensore ridotto
 |
 |
 |
 |
|
' {$STAMP
BS2} |
Per quanti volessero realizzare i progetti presentati nel sito e non possedessero la scheda possono utilizzare la nuova scheda della Parallax denominata Scheda USB BoE +chip BS2 + Kit con la possibilità di collegamento tramite USB,
|
|---|
| Elenco revisioni: | |
| 26/11/2010 | Aggiornato la pagina con sostituzione del filmato con analogo pubblicato su YOUTUBE |
| 20/11/2006 | Corretto link |
| 09/11/2006 | Aggiornato pagina |
| 03/11/2006 | Aggiornato pagina |
| 23/10/2006 | Emissione preliminare |