Quello presentato in questa
pagina è una nuova versione di uno shield d'interfaccia, che sostituisce quello
precedentemente costruito utilizzando una basetta mille fori.
Old shield
New shield
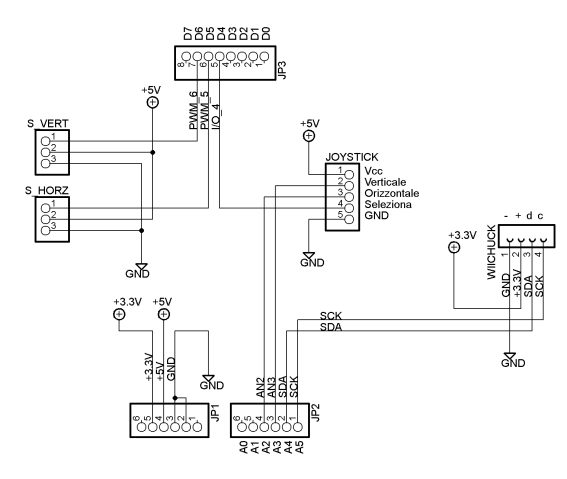
è estremamente semplice limitandosi
ad alcuni connettori, oltre al collegamento di un controller Nunchuck
permette il collegamento di un Joystick analogico.
L'alimentazione del controller Nunchuck
che richiede 3V3 viene prelevato direttamente dalla scheda Arduino.
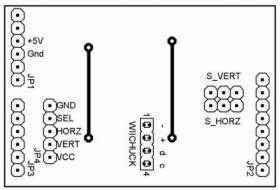
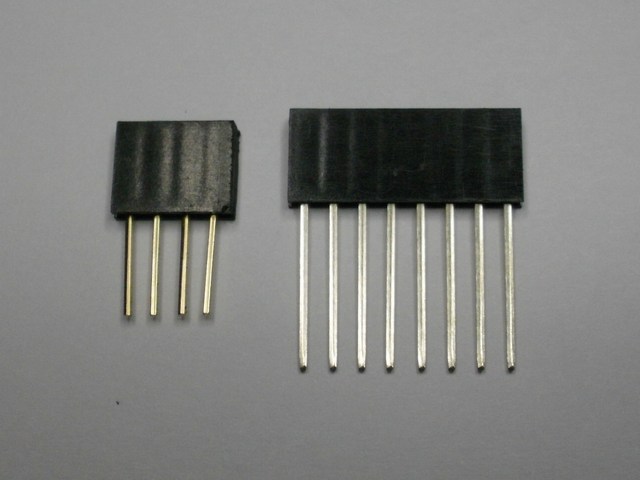
Elenco componenti
JP1-2
PIN strip maschio 1x6
JP3
PIN strip maschio 1x8
S VERT; S HORZ
PIN strip femmina 1x3
JOYSTICK
PIN strip maschio 1x5
WIICHUCK
PIN strip femmina 1x4
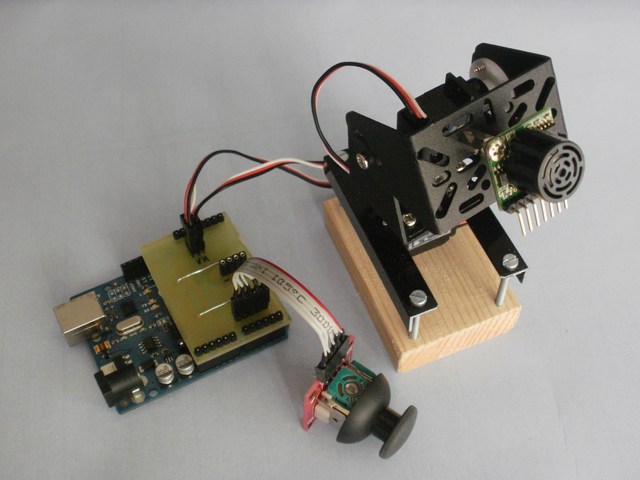
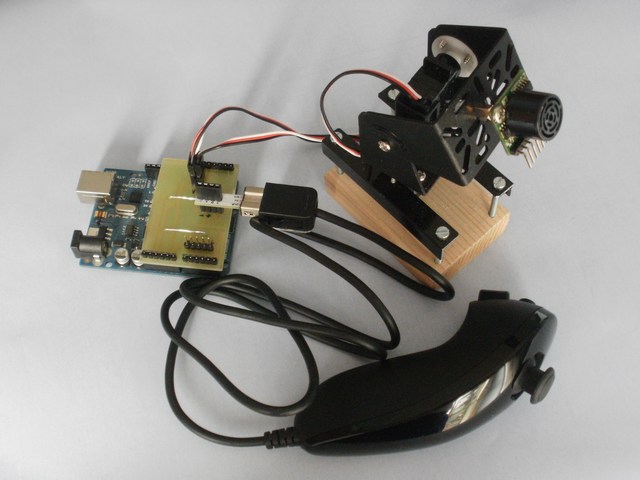
Il filmato
mostra il test di un dispositivo Pan & Tilt
azionato dal controller Nunchuck
Utilizzo dello shield per pilotare un dispositivo Pan & Tilt con un Joystick
Utilizzo dello shield per pilotare un dispositivo Pan & Tilt con un controller Nunchuck
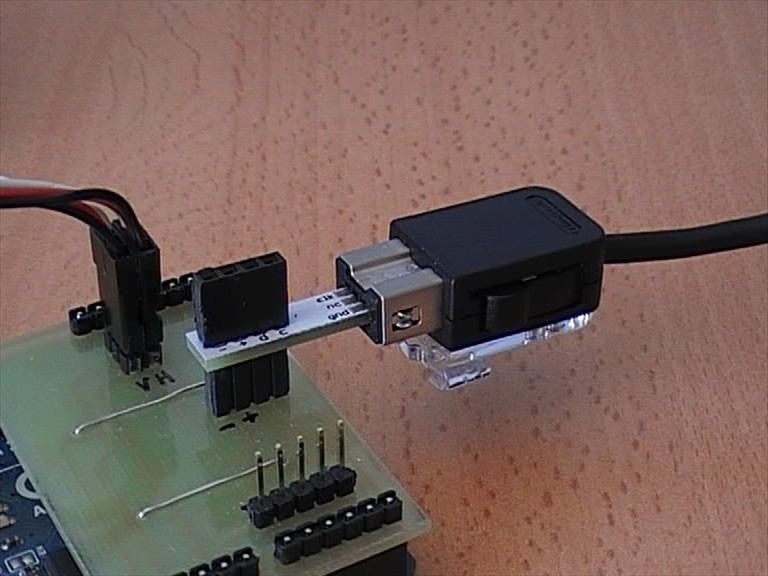
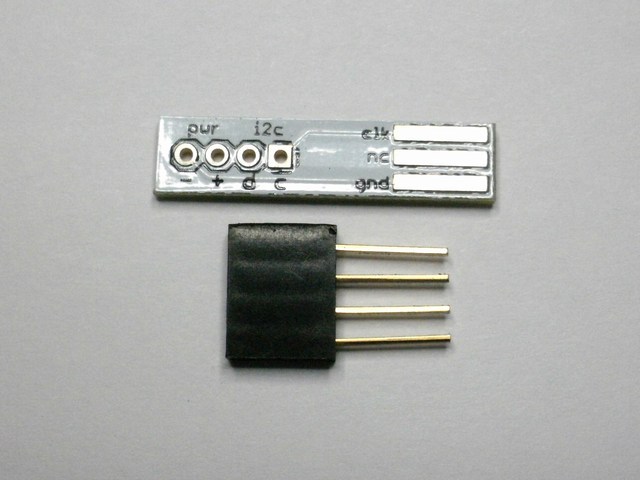
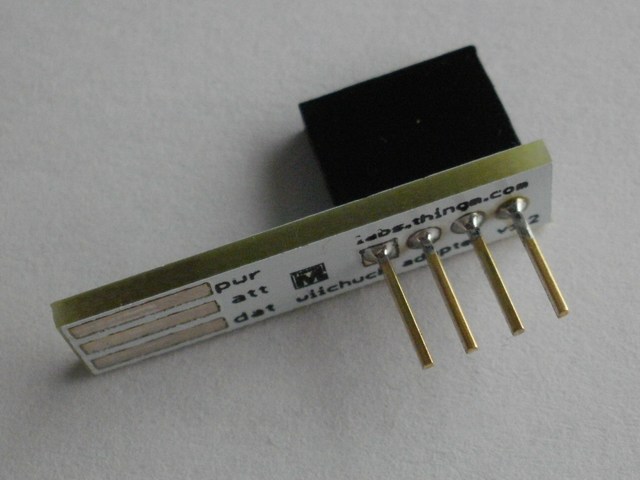
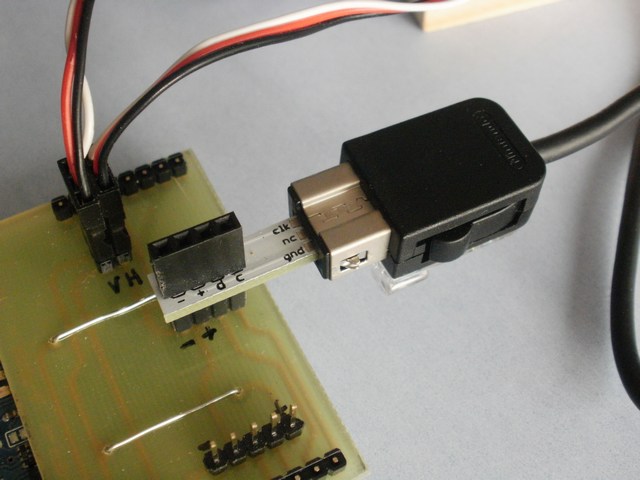
WiiChuck Adapter, codice DEV-09281 Descrizione: L'adattatore WiiChuck è un piccolo
circuito stampato che è progettato per essere inserito nel connettore di
un Nintendo Wii Nunchuck per fornire l'accesso a tutti i 4 fili del
telecomando: alimentazione e i due fili del Nunchuck su un pin headr con
passo 2,5mm
Foto
della schedina per l'adattatore (Fonte SparkFun)
Fasi di
montaggio del connettore
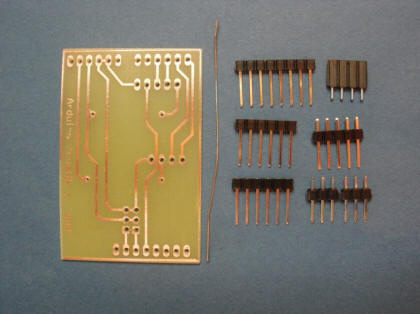
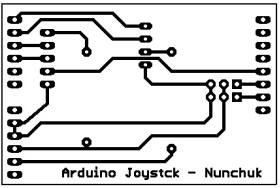
Costruzione della scheda
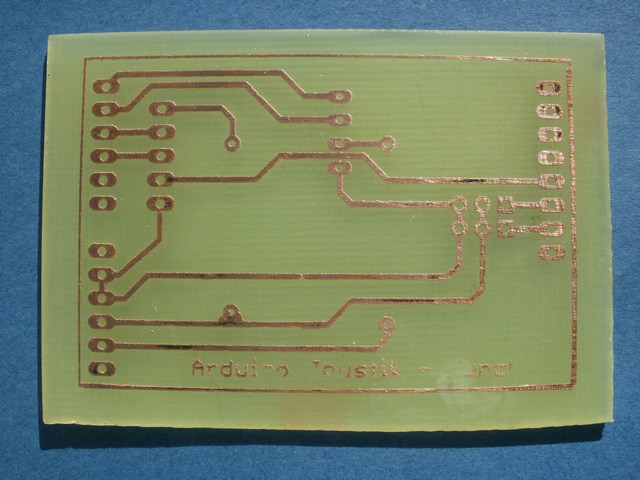
La costruzione inizierà dalla
realizzazione del circuito stampato si scaricare il PDF che riporta la traccia in scala 1:1. Per la
sua realizzazione si utilizzerà una basetta in vetronite (monofaccia) di
dimensioni 35x53mm circa, il metodo potrà essere quello della fotoincisione o
del trasferimento termico utilizzando i cosiddetti fogli blu (PRESS-N-PELL).
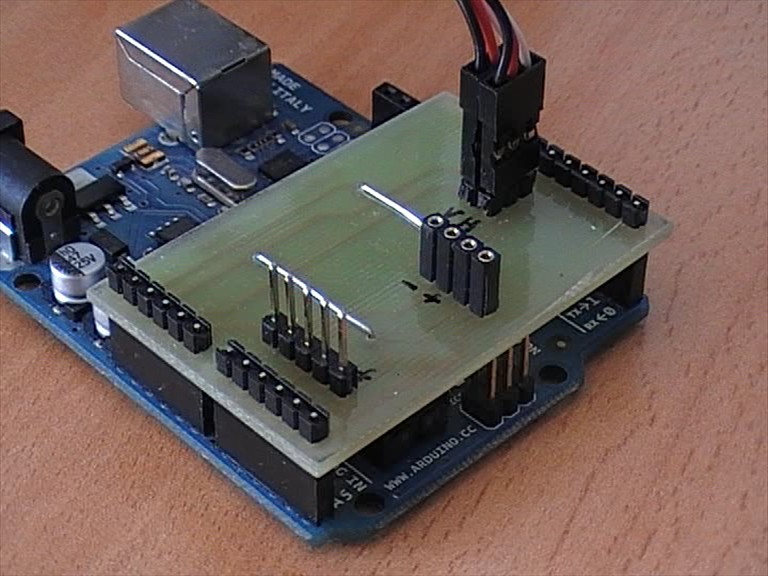
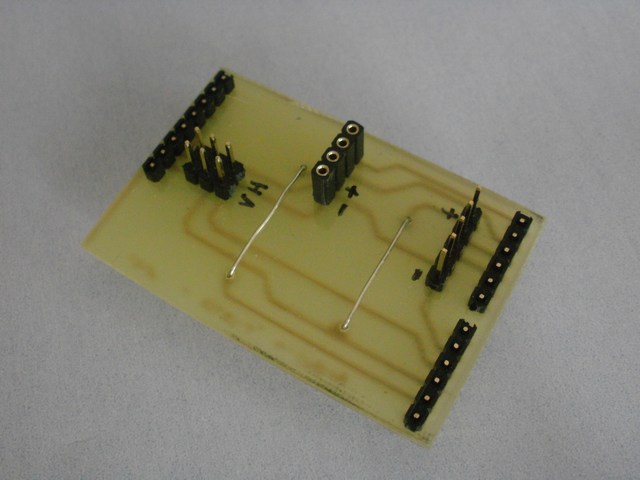
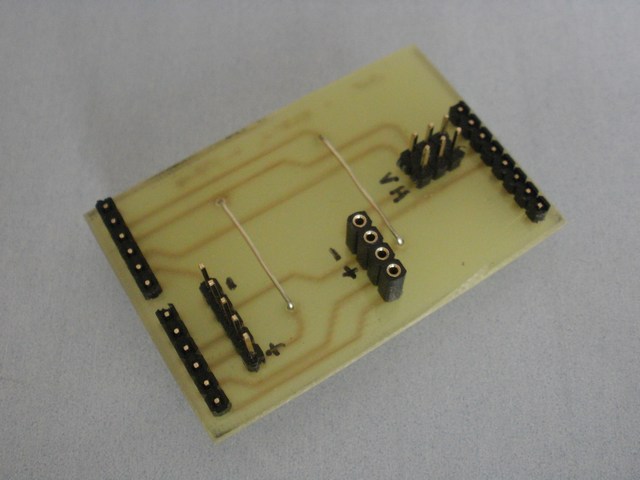
Fasi di montaggio dello
Shield per Nunchuk/Joystick
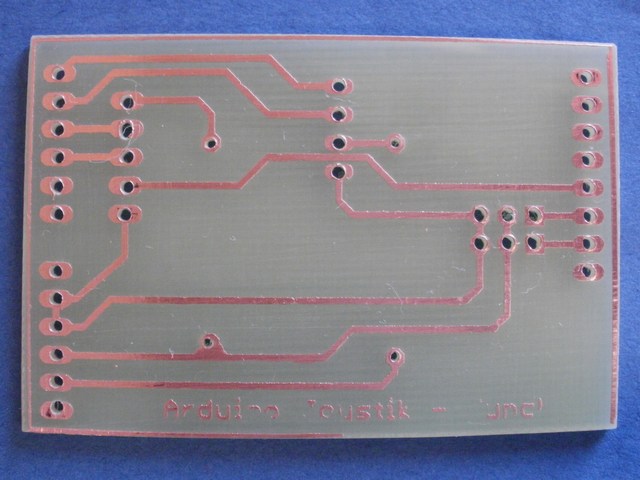
Una
volta inciso il rame, si verificherà in controluce o mediante l’utilizzo di un
multimetro, che non vi siano cortocircuiti soprattutto tra le piste più vicine.
Si passerà quindi alla foratura della stessa, utilizzando principalmente una
punta da 0,8-1 mm.
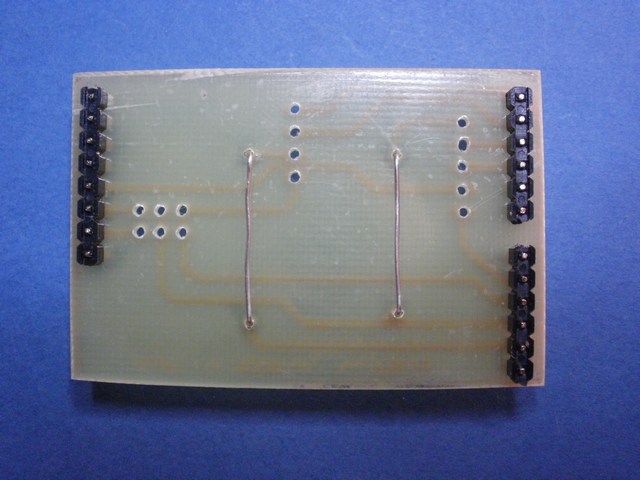
Quindi si posizioneranno e salderanno i connettori e i due ponticelli seguendo lo schema riportato
sotto.
Per la saldatura si utilizzerà un piccolo saldatore a punta fine, della potenza
di circa 25 – 30 W.
Foto
delle fasi di
montaggio della scheda
Alcuni
dettagli dello
Shield per Nunchuk
Programma di
gestione
Il programma qui presentato
permette di azionare un dispositivo Pan
& Tilt che può essere auto costruito seguendo le indicazioni riportate
in questa pagina
/*Programma:new_Comando_telecamera_Nunchuk.ino Versione: 1.0 Comando dispositivo Pan & Tilt tramite Nunchuk Porte utilizzate Pin +5V -> Alimentazione servo Pin +3V3 -> Alimentazione Nunchuk Pin GND -> Alimentazione Porta D5 servo Rotazione telecamera Porta D6 servo Rotazione base Porta A4 SDA porta P18 Porta A5 SCK porta P19 Lettura dei valeurI min e max Joystick X: mini=26 maxi=219 ==> a riposo = 123 Joystick Y: mini=31 maxi=229 ==> a riposo = 129 Bottone C=1 a riposo C=0 premuto Bottone Z=1 a riposo Z=0 premuto Creato il 27/06/2012 da Adriano Gandolfo <https://www.adrirobot.it> This example code is in the public domain. */
#include <Wire.h>
#include <string.h>
#include <stdio.h>
uint8_t outbuf[6];
int cnt = 0;
int ledPin = 13;
int servoPin2 = 5; // Pin servo Rotazione telecameraint servoPin = 6; // Pin servo Rotazione baseint pulseWidth = 0;
int pulseWidth2 = 0;
long lastPulse = 0;
long lastPulse2 = 0;
int z_button = 0;
int c_button = 0;
int refreshTime = 20;
int minPulse = 200; //int minPulse2 = 200;
int zeroPulse = 400; // Azzeramento posizione servo Rotazione basint zeroPulse2 = 350; // Azzeramento posizione Rotazione telecameraint dtime=10;
#define pwbuffsize 10
long pwbuff[pwbuffsize];
long pwbuffpos = 0;
long pwbuff2[pwbuffsize];
long pwbuffpos2 = 0;
voidsetup()
{
Serial.begin (9600);
Wire.begin ();
nunchuck_init ();
pinMode(servoPin, OUTPUT);
pinMode(servoPin2, OUTPUT);
pulseWidth = minPulse;
pulseWidth2 = minPulse2;
Serial.print ("Impostazione terminata");
}
void nunchuck_init()
{
Wire.beginTransmission (0x52);
Wire.write (0x40);
Wire.write (0x00);
Wire.endTransmission ();
}
void send_zero()
{
Wire.beginTransmission (0x52);
Wire.write (0x00);
Wire.endTransmission ();
}
int t = 0;
voidloop()
{
t++;
long last = millis();
if( t == 1) {
t = 0;
Wire.requestFrom (0x52, 6);
while (Wire.available ()) {
outbuf[cnt] = nunchuk_decode_byte (Wire.read ());
digitalWrite (ledPin, HIGH);
cnt++;
}
if (cnt >= 5) {
printNunchuckData();
int z_button = 0;
int c_button = 0;
if ((outbuf[5] >> 0) & 1)
z_button = 1;
if ((outbuf[5] >> 1) & 1)
c_button = 1;
switch (c_button) {
case 1:
switch (z_button) {
case 0:
break;
case 1:
muovi();
break;
}
break;
case 0:
switch (z_button) {
case 0:
delay(10000);
break;
case 1:
delay(3000);
break;
}
break;
}
}
cnt = 0;
send_zero();
} // if(t==)
updateServo();
delay(dtime);
}
void updateServo() {
if (millis() - lastPulse >= refreshTime) {
digitalWrite(servoPin, HIGH);
delayMicroseconds(pulseWidth);
digitalWrite(servoPin, LOW);
digitalWrite(servoPin2, HIGH);
delayMicroseconds(pulseWidth2);
digitalWrite(servoPin2, LOW);
lastPulse = millis();
}
}
int i=0;
void printNunchuckData()
{
int joy_x_axis = outbuf[0];
int joy_y_axis = outbuf[1];
int accel_x_axis = outbuf[2]; // * 2 * 2; int accel_y_axis = outbuf[3]; // * 2 * 2;int accel_z_axis = outbuf[4]; // * 2 * 2;int z_button = 0;
int c_button = 0;
if ((outbuf[5] >> 0) & 1)
z_button = 1;
if ((outbuf[5] >> 1) & 1)
c_button = 1;
if ((outbuf[5] >> 2) & 1)
accel_x_axis += 2;
if ((outbuf[5] >> 3) & 1)
accel_x_axis += 1;
if ((outbuf[5] >> 4) & 1)
accel_y_axis += 2;
if ((outbuf[5] >> 5) & 1)
accel_y_axis += 1;
if ((outbuf[5] >> 6) & 1)
accel_z_axis += 2;
if ((outbuf[5] >> 7) & 1)
accel_z_axis += 1;
Serial.print (i,DEC);
Serial.print ("\t");
Serial.print ("X: ");
Serial.print (joy_x_axis, DEC);
Serial.print ("\t");
Serial.print ("Y: ");
Serial.print (joy_y_axis, DEC);
Serial.print ("\t");
Serial.print ("Tasto Z: ");
Serial.print (z_button, DEC);
Serial.print (" ");
Serial.print ("Tasto C: ");
Serial.print (c_button, DEC);
Serial.println ("");
i++;
}
char nunchuk_decode_byte (char x)
{
x = (x ^ 0x17) + 0x17;
return x;
}
void muovi (){
float tilt = (zeroPulse - outbuf[0]);
float tilt2 = (zeroPulse2 - outbuf[1]);
tilt = (tilt);
pulseWidth = (tilt * 5) + minPulse;
tilt2 = (tilt2);
pulseWidth2 = (tilt2 * 5) + minPulse2;
pwbuff [pwbuffpos] = pulseWidth;
pwbuff2[pwbuffpos2] = pulseWidth2;
if( ++pwbuffpos == pwbuffsize ) pwbuffpos = 0;
if( ++pwbuffpos2 == pwbuffsize ) pwbuffpos2 = 0;
pulseWidth=0;
pulseWidth2=0;
for( int p=0; p<pwbuffsize; p++ ){
pulseWidth += pwbuff[p];
pulseWidth2 += pwbuff2[p];
}
pulseWidth /= pwbuffsize;
pulseWidth2 /= pwbuffsize;
}