![]()
![]()
ultimo aggiornamento 22 giugno 2007
|
|
ultimo aggiornamento 22 giugno 2007 |
|
|
|
|
Grazie ai componenti allegati ai nuovi fascicoli puoi realizzare una ‘mano’
prensile, costituita da tre dita di cui uno opponibile movimentato da un
apposito motore elettrico, che consente di afferrare piccoli oggetti. Il
motore viene controllato tramite un’apposita scheda (Hand), posta anch’essa
nell’avambraccio, in modo da poter scegliere tra tre diversi livelli di
forza nella chiusura delle dita. Grazie ai contenuti del quarto CD-ROM
(anch’esso allegato alla nuova serie di fascicoli), la ‘mano’ può essere
azionata: |
|

 |
 |
Fascicoli per la costruzione della mano
|
|---|
Fasi di montaggio della mano
|
|---|
Scheda di controllo
|
|---|
|
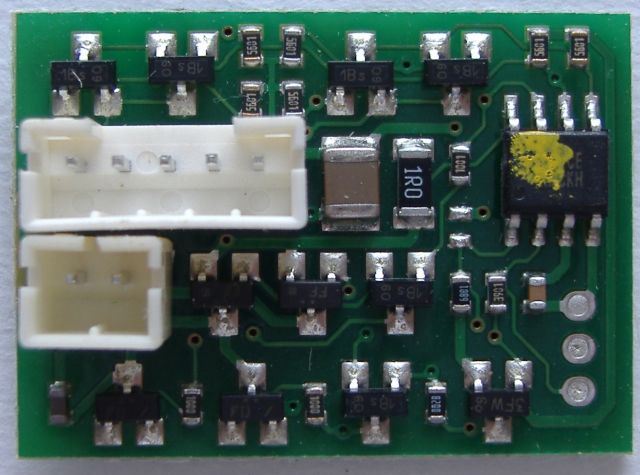
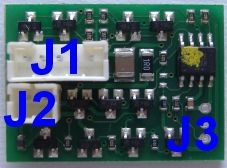
La scheda di controllo della mano
ha le dimensioni di 28x20 mm, riporta la sigla Hand-Rev 1.0.
Sulla scheda è presente un piccolo processore dalla sigla MG4CE RMCKH Sulla scheda sono presenti 2 connettori. J1 a questo connettore (5 poli) andrà collegato il cavo che precedentemente andava collegato alla presa con connettore mini USB J2 a questo connettore (2 poli) andrà collegato il motore che aziona la mano. Esiste poi un connettore J3 di cui non è noto l'utilizzo. |
|
| Elenco revisioni | |
| 22/06/2007 | Emissione preliminare |