
ULN2003A Stepper Motor Controller
ultimo aggiornamento 20 luglio 2019
|
|
ULN2003A Stepper Motor Controller ultimo aggiornamento 20 luglio 2019 |
|
|
|
Il kit venduto dalla Elegoo tramite il sito AMAZON contenuto all'interno in un piccolo contenitore in materiale plastico è formato da:
n° 4 motori unipolari Stepper tipo 28-BYJ48
n° 4 schede di controllo (basata sul Driver 7 canali darlington NPN tipo ULN2003A
n° 1 piattina multicolore 10 cavi con connettori Dupont maschio/femmina
I motori Stepper Motor sono un tipo di dispositivo elettromagnetico che si muove in passi discreti. All'interno sono presenti diverse bobine, l'albero centrale ha una serie di magneti montati su di esso, alle bobine che circondano l'albero sono alternativamente date corrente o no, creando campi magnetici che respingono o attraggono i magneti sull'albero, facendo ruotare il motore. Questo motore unipolare Stepper è dotato di cinque fili e quattro bobine. Le connessioni centrali delle bobine sono collegate tra loro e solitamente utilizzate come connessione di alimentazione. Si chiamano stepper unipolari perché la potenza arriva sempre su questo polo.
 |
|
.jpg)
.jpg)
.jpg)
Schema elettrico
Sulla scheda, oltre all'integrato
ULN2003A, troviamo 4 diodi LED con le relative
resistenze limitatrici, i LED A, B, C, D indica lo stato del funzionamento del
motore passo-passo.
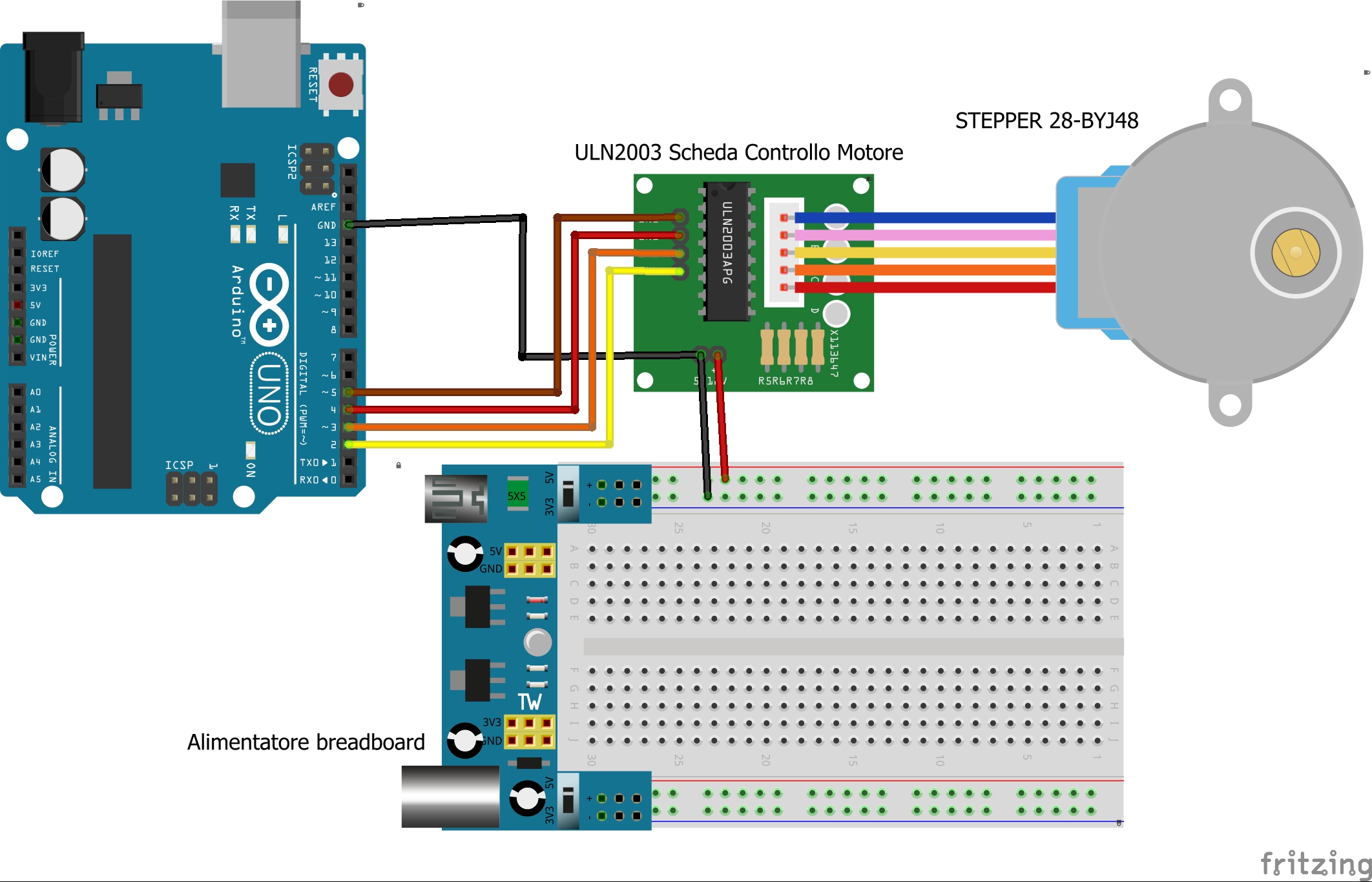
I segnali di controllo provenienti dalla scheda di controllo devono essere
collegati alla pin strip J1, il motore viene collegato alla Pinstrip a 5 poli
J4.
La pin strip J3 serve per l'alimentazione, se si collega il motore 28-BYJ48
che deve essere alimentato a 5V si dovrà montare un cavallotto in modo che la
stessa tensione arrivi oltre che all'integrato U1 anche al motore.
Visto l'assorbimento del motore, l'alimentazione al motore non può essere
derivata dalla scheda di controllo, ma dovrà essere fornita da apposito
alimentatore esterno



.jpg)
.jpg)
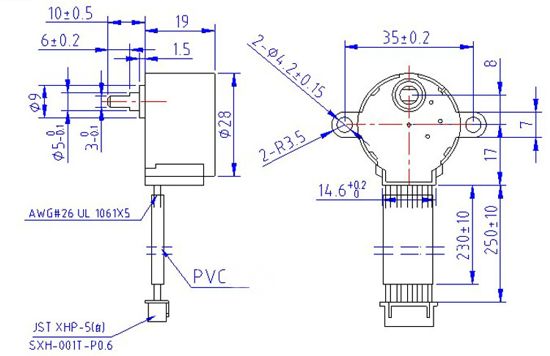
Caratteristiche del motore stepper 28BYJ-48
|
.jpg)
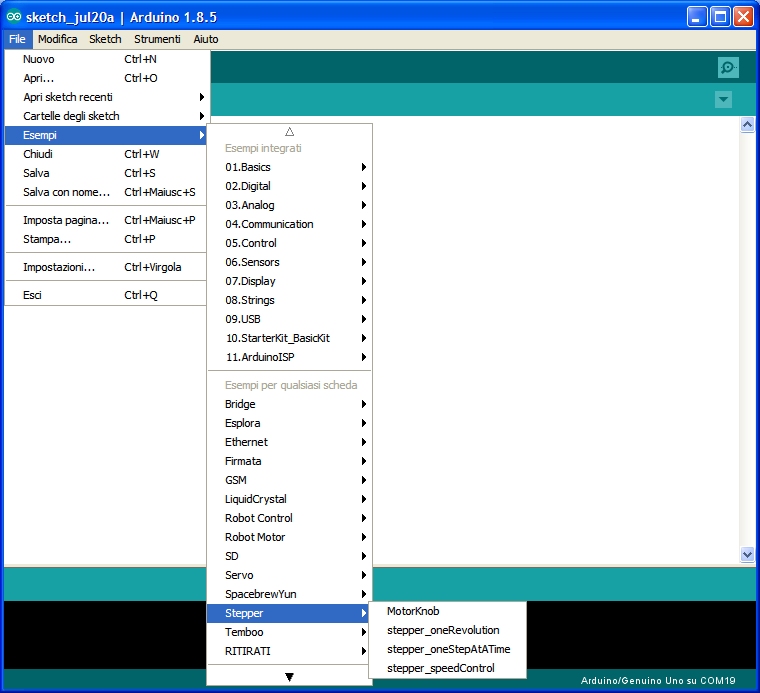
Segue un semplice sketch di prova, per il suo utilizzo si fa uso della libreria stepper che si trova tra quelle standard dell'IDE, le funzioni disponibili nella libreria sono:
lo sketch utilizzato
test_stepper.ino è derivato
tra quelli presenti negli esempi della libreria il suo
nome è Stepper Motor Control - one revolution.
In questo esempio, l'albero esegue una rotazione completa in senso orario,
eseguendo il numero di 2048 passi utilizzando la libreria Arduino
Stepper. Lo stepper è controllato da pin digitali 2, 3, 4 e 5 secondo lo schema
tipico riportato sopra.
Sotto è anche visibile un breve filmato.
Sketch test_stepper
![]()
|
|
|
Altri progetti con moduli per il comando di motori
|
|
|
 |
 |
|
|
Motor shield |
Infineon motor Shield |
modkit MotoProto L298 | L293 shield | Scheda con L297 - L298N |
 |
 |
 |
 |
 |
| Modulo con L293 | Modulo con doppio L293 | Modulo con ULN2003A | Modulo con TB6612FNG | Modulo con LB1836M |
| Elenco revisioni | |
|
20/07/2019 | Inserito programma e filmato |
|
09/04/2019 | Emissione preliminare |

