
ultimo aggiornamento 7 ottobre 2009
|
|
ultimo aggiornamento 7 ottobre 2009 |
|
|
|
Materiale necessario.
1
Scheda di controllo
robot con CB220
1
Modulo sensori di contatto con 2 microswitch a levetta.
1
Modulo controllo motori DC
1 Chassis - Round Robot
Chassis Pololu
1 Doppio motoriduttore
Tamiya ITEM.70097
1 Ball
caster Tamiya ITEM. 70144
1 TRUCK TIRE SET Tamiya ITEM.
70101*250
1 Porta batterie plastico adatto ad accogliere tre batterie di
tipo stilo (AA), terminali a clips.
1 Deviatore a leva miniatura 2 vie on-o-on
4 Distanziali esagonali M3x25
4 Distanziali esagonali M3x15
2 Profilato in alluminio L 25x15x1,5 l=100mm
2 Profilato in alluminio piatto 15x2 l=95mm
1 Profilato in alluminio piatto 25x2 l=60mm
Viti M3x10
Dadi M3
| Portabatteria | Interruttore a levetta |
|
|
|

Il montaggio del robot prevede alcune fasi preliminari:
Assemblaggio del gruppo motoriduttore
Assemblaggio delle ruote
Assemblaggio del “Ball Caster"
Per il montaggio
occorre seguire le istruzioni contenute nelle confezioni. Per i motoriduttori si
seguiranno le istruzioni per l’assemblaggio della versione con riduzione di
203:1.
Si dovranno poi tagliare e sagomare i profili di alluminio per realizzare il
telaio del robot, seguendo le indicazioni riportate nella figura sotto

Come materiale si
utilizzeranno dei profilati in alluminio che potranno essere acquistati presso
una ferramenta ben fornita.
Come attrezzi di lavoro saranno necessari un seghetto da ferro e un trapano
(possibilmente a colonna) con cui realizzare i fori mediante una punta dal
dimetro di 3,5 mm per i fori di fissaggio e 6,5 mm per l’interruttore a levetta.
L’asola di fissaggio del connettore RS232 della scheda sarà da realizzare con
una serie di fori ravvicinati e rifinita con una lima per metalli di piccole
dimensioni.
Si passerà poi all’assemblaggio vero e proprio del robot partendo dal disco di
base e si fisseranno i vari componenti utilizzando dove possibile i fori
presenti sulla base, o realizzandone sui profili di alluminio.
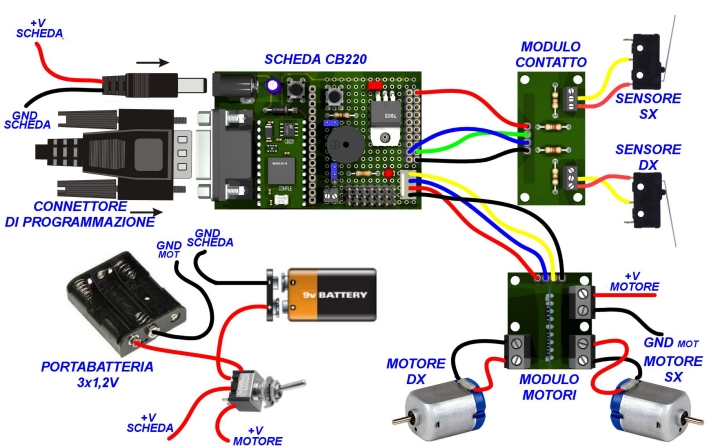
Una volta completato il montaggio meccanico si passerà alla realizzazione del
cablaggio elettrico seguendo lo schema visibile sotto.
Schema del cablaggio del robot
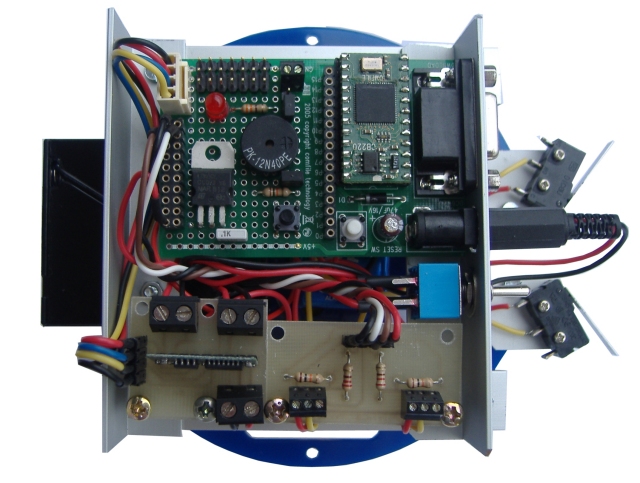
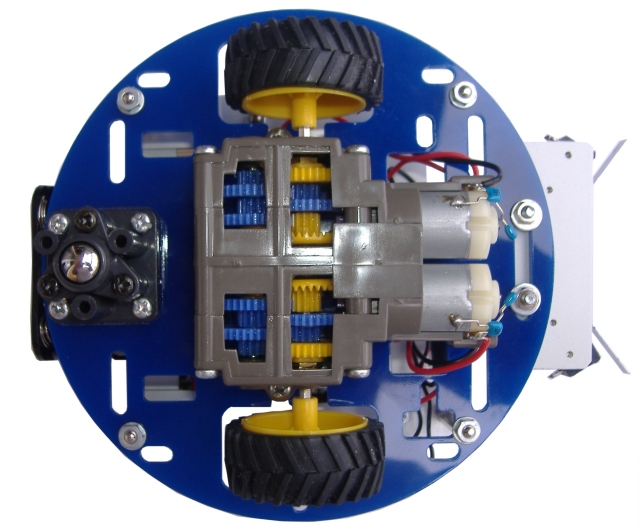
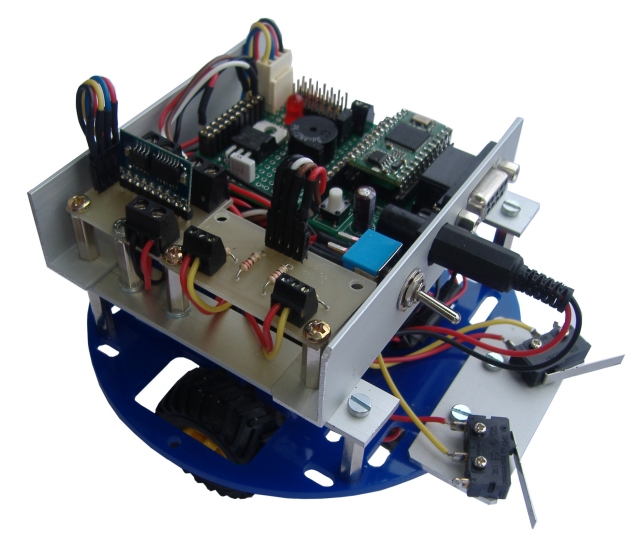
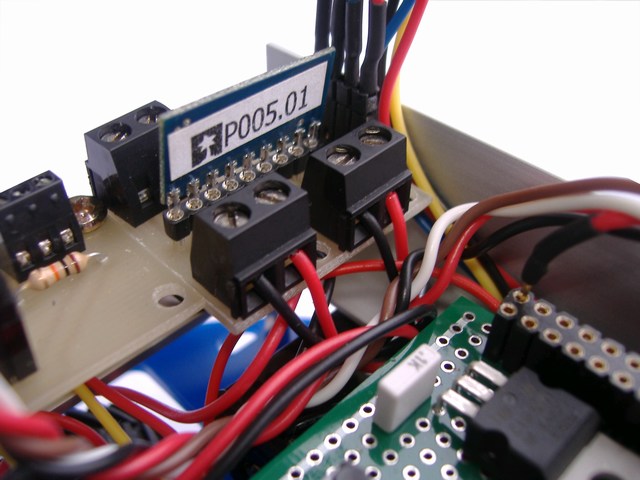
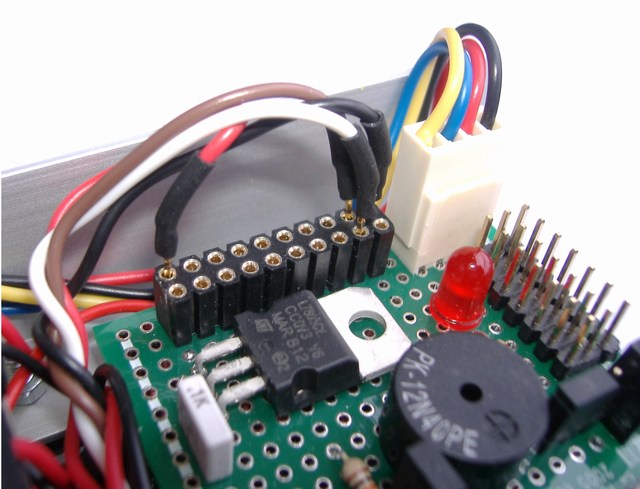
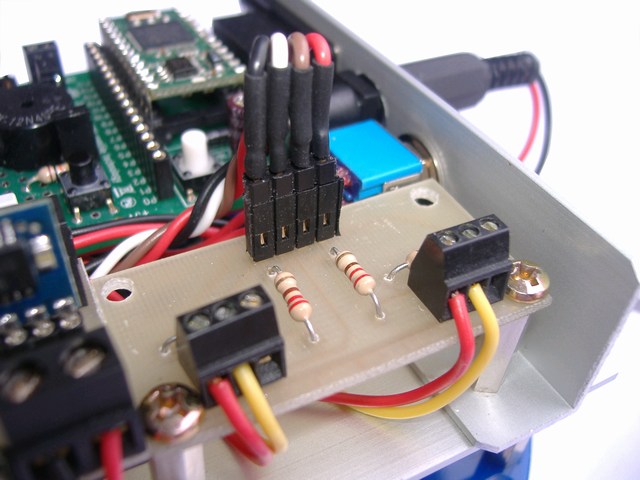
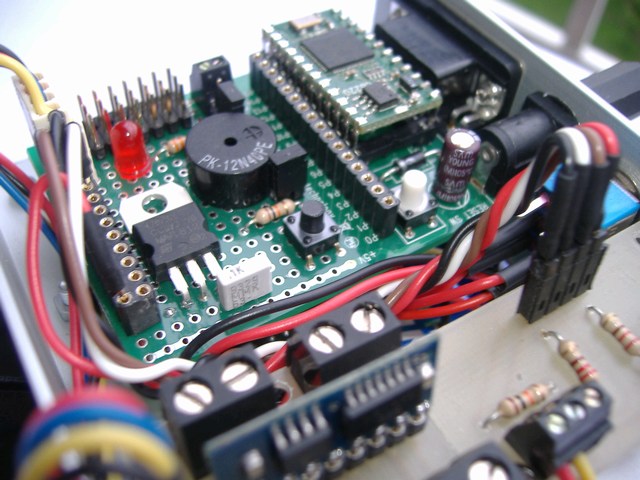
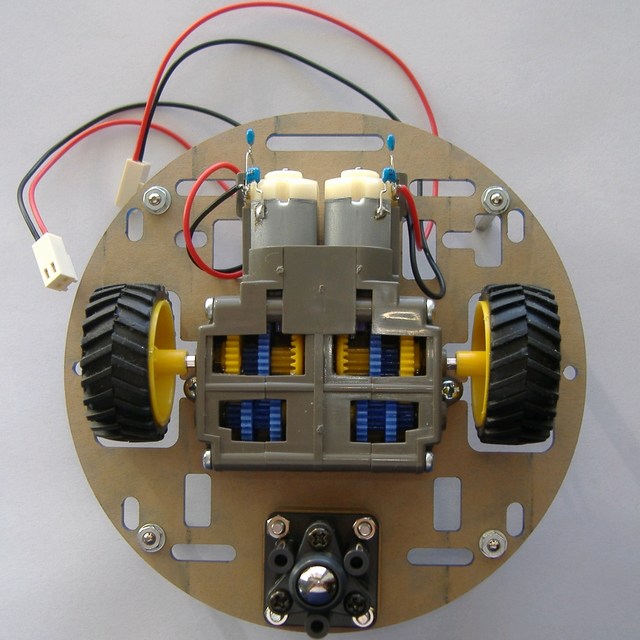
Alcune foto di dettaglio del robot
| Elenco revisioni | |
| 07/10/2009 | Aggiornato pagina |
| 29/09/2009 | Emissione preliminare |








{kind=link}
{kind=link}