
ultimo aggiornamento 14 gennaio 2012
|
|
ultimo aggiornamento 14 gennaio 2012 |
|
|
|
Materiali e Attrezzi
Per l’assemblaggio del robot ricorreremo a componenti derivati dalle opere a fascicoli “COSTRUISCI E PROGRAMMA IL TUO ROBOT" con cui si assemblava il robot “Panettone” e “Ultimate Real Robot” che permetteva il montaggio del robot “Cybot” entrambe edite dalla DeAgostini.
  |
  |
| Opera “Panettone | Opera “Cybot” |

Materiali prelevati dal
Fascicolo 1 dell'opera Cybot:
|
I materiali prelevati dal Fascicolo 2 dell'opera Cybot:
|
I materiali prelevati dal Fascicolo 3 dell'opera Cybot:
|
 |
 |
  |
Scheda di controllo e sensori di contatto recuperati dal robot Panettone della DeAgostini

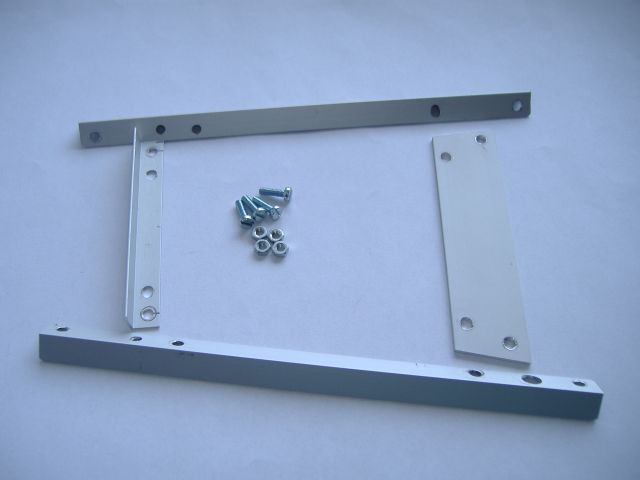
Per proseguire la costruzione del robot è necessaria la seguente minuteria metallica, reperibile presso una normale ferramenta, mentre i distanziali sarà più facile reperirli presso un negozio di materiale elettronico in quanto utilizzati come supporto dei circuiti stampati:
- 4 distanziali esagonali M3 l=10mm
- 4 distanziali esagonali M3 l=30mm
(montati sulla base del robot)
- 8 viti testa cilindrica con intaglio M3x10 (telaio).
- 4 viti testa cilindrica con intaglio M3x8 (scheda controllo).
- 1 vite testa cilindrica con intaglio M3x20.
- 1 distanziale in plastica l=20 mm (per scheda motore).
- 9 dadi M3
- 5 rondelle piane foro interno ø 3,2 mm.
Occorrerà inoltre costruire dei particolari d’alluminio seguendo i
disegni che è possibile scaricare.
Come materiale si utilizzeranno dei profilati in alluminio che potranno
essere acquistati presso una ferramenta ben fornita (tipo Brico o
similari)
Come attrezzi saranno necessari un seghetto da ferro e un trapano
(possibilmente a colonna) con cui realizzare i fori mediante una punta dal
diametro di 3,5 mm per i fori di fissaggio e 6,5 mm per l’interruttore a
levetta.
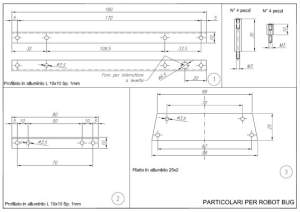 Disegno dei particolari in alluminio |
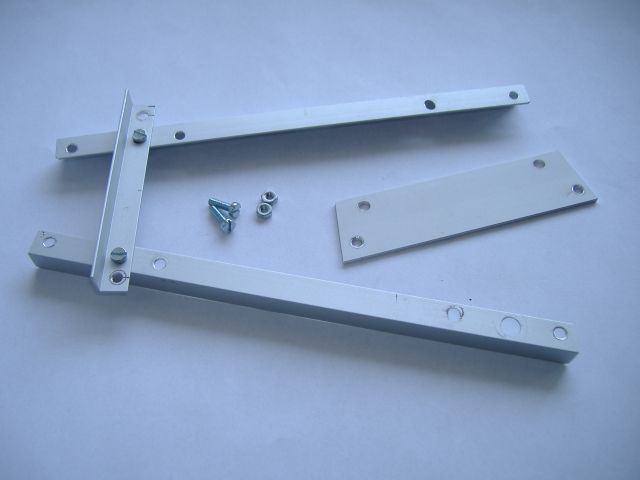
 Foto della minuteria necessaria |
 Foto dei particolari realizzati |
Sono poi necessari degli attrezzi per il montaggio: un cacciavite, una pinza, una forbice da elettricista, delle pinzette, saldatore e stagno per le saldature
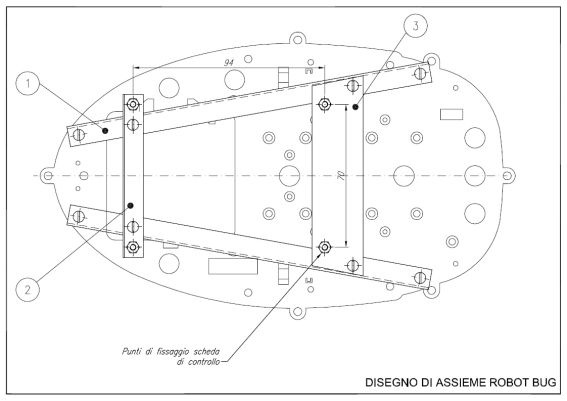
Fasi di montaggio del telaio
Per l’assemblaggio preliminare
del telaio si dovranno seguire le istruzioni presenti sul rispettivo
fascicolo dell’opera Cybot, non inseriremo i ripari gommati, dovremo allungare i
cavi dei motori e inserire un interruttore a levetta sui cavi connessi al vano
batteria.
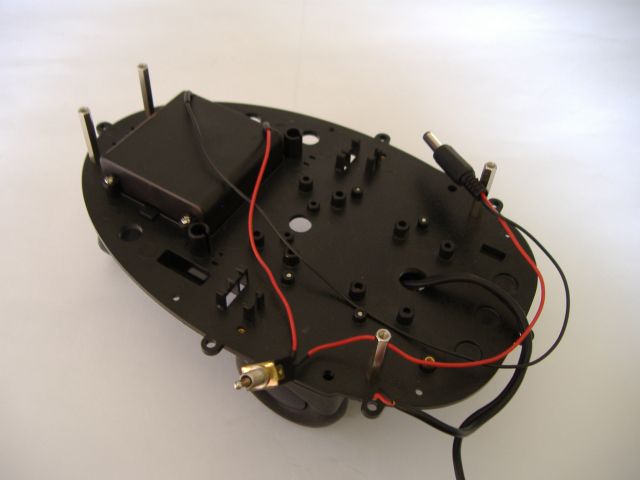
Inseriremo poi i distanziali esagonali
lunghi 30 mm con dado e rondella per il fissaggio del telaio
di supporto della scheda di controllo, utilizzando alcuni fori già presenti.
 |
 |
 |
In particolare, quelli posteriori saranno avvitati a delle boccole filettate già presenti, mentre per quelli anteriori si dovranno utilizzare 2 dadi M3. Come attrezzi ci si aiuterà con una piccola pinza.
 |
 |
 |
I cavi d’alimentazione, che dovranno sostituire quelli presenti, saranno da realizzare mediante del cavo flessibile in rame, e dovranno terminare con uno spinotto polarizzato per alimentare la scheda di controllo, dove il cavo nero (negativo) sarà collegato all’esterno dello spinotto, mentre il cavo rosso (positivo) al piolo centrale
 |
 |
 |
 |
 |
Si passerà quindi ad assemblare il telaio d’alluminio utilizzando i particolari e la minuteria realizzata seguendo i disegni già descritti. Per il montaggio ci si aiuterà con un cacciavite a lama piatta e una pinza.
 |
 |
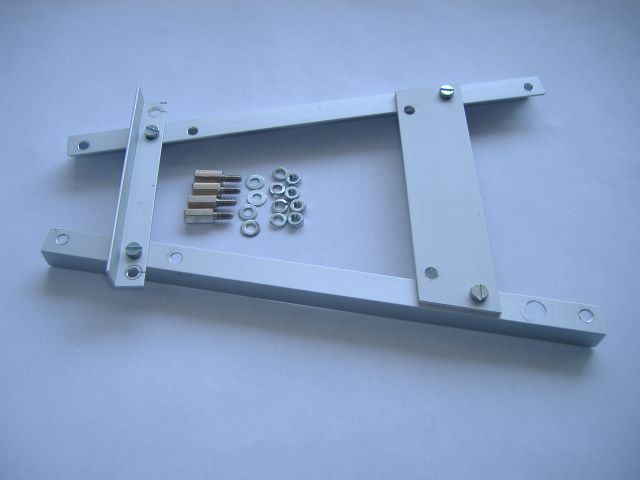 |
Si passerà quindi a fissare i distanziali esagonali da 10 mm, che serviranno a fissare la scheda di controllo, a fine montaggio avremo completato il montaggio del telaio.

Si fisserà quindi il telaio sui distanziali esagonali, fissandolo il tutto con 4 viti, si fisserà in questa fase anche l’interruttore a levetta.

Si proseguirà il montaggio fissando la scheda di controllo al telaio, fissandola sempre con 4 viti.

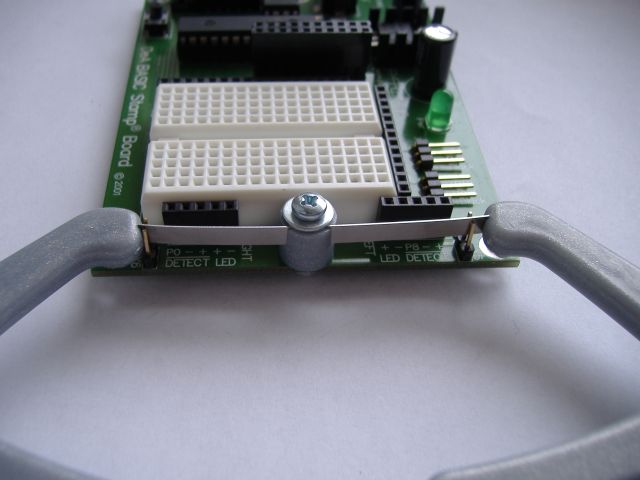
Si prosegue poi con l’installazione dei sensori di contatto, per i quali ho utilizzato quelli del robot “Panettone“allegati al fascicolo 16.
 |
 |
 |
 |
Questi andranno fissati alla scheda di controllo.
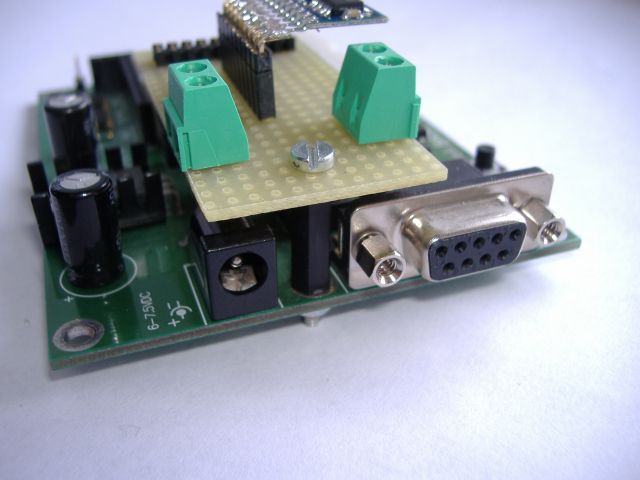
Si passa quindi all’installazione della scheda di pilotaggio dei motori.
S’inserirà quindi il connettore a quello presente sulla scheda di
controllo, e si fisserà tramite una vite e un dado, utilizzando l'apposito
foro presente sulla scheda di controllo.
Si passerà così alle ultime fasi di montaggio, con il
collegamento dei motori alla scheda utilizzando le due morsettiere
presenti.
S’inserirà lo spinotto d’alimentazione verificando che attivando
l’interruttore a levetta si accenda l’apposito led verde presente sulla
scheda di controllo.
Ricordarsi di inserire quattro batterie del tipo AA
nell’apposito vano rispettandone la polarità.
 |
 |
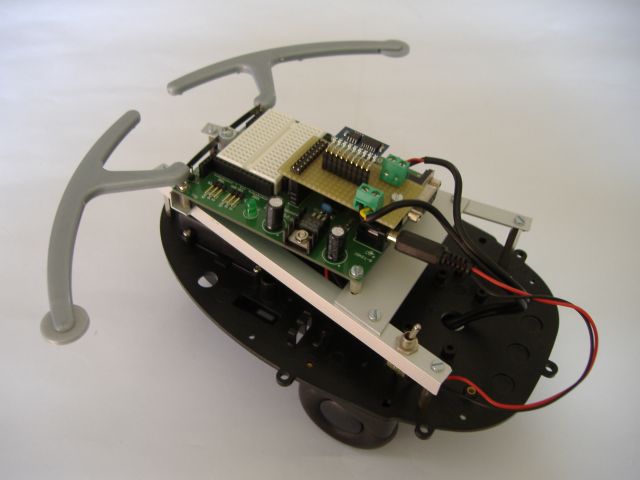
A questo punto il nostro robot è montato e possiamo passare alla sua programmazione.
| Elenco revisioni | |
| 14/01/2012 | Aggiornato pagina |
| 04/06/2007 | Emissione preliminare |

