I-DROID01
I-DROID01
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Hardware
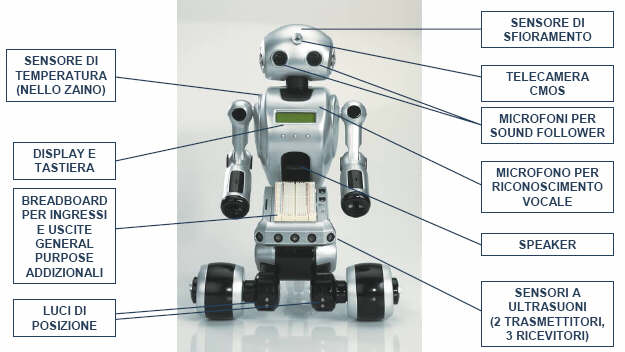
 I-Droid01
è stato progettato e realizzato dalla RoboTech, una società fondata da
due membri dell'Advanced Robotics Technology and System Laboratory
(ARTS Lab) della Scuola Superiore Sant'Anna di Pisa. Nel corso di un
progetto di ricerca lungo un anno, la RoboTech ha sviluppato
dispositivi e software che rendono I-Droid01 capace di vedere, sentire
e rispondere agli essere umani. Il robot è stato distribuito in Italia
con l'opera a dispense settimanali "Costruisci il tuo personal robot
I-D01, vede, sente, parla, si muove come vuoi tu" della casa
editrice DeAgostini in due edizioni uguali di 90 fascicoli a partire da
agosto 2005 (I ediz.) e agosto 2006 (II ediz.). La stessa collezione è
stata successivamente tradotta e distribuita all'estero in vari paesi. I-Droid01
è stato progettato e realizzato dalla RoboTech, una società fondata da
due membri dell'Advanced Robotics Technology and System Laboratory
(ARTS Lab) della Scuola Superiore Sant'Anna di Pisa. Nel corso di un
progetto di ricerca lungo un anno, la RoboTech ha sviluppato
dispositivi e software che rendono I-Droid01 capace di vedere, sentire
e rispondere agli essere umani. Il robot è stato distribuito in Italia
con l'opera a dispense settimanali "Costruisci il tuo personal robot
I-D01, vede, sente, parla, si muove come vuoi tu" della casa
editrice DeAgostini in due edizioni uguali di 90 fascicoli a partire da
agosto 2005 (I ediz.) e agosto 2006 (II ediz.). La stessa collezione è
stata successivamente tradotta e distribuita all'estero in vari paesi. Alcuni siti che si occupano di I-D01:

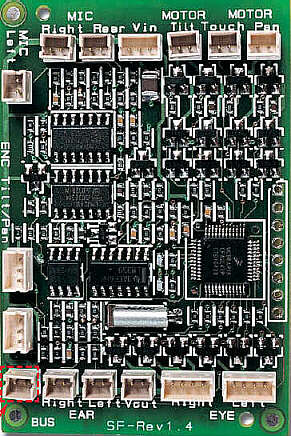
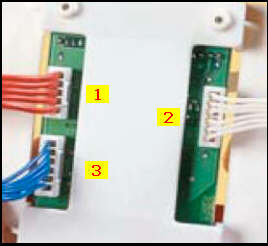
In alto da sinistra a destra - microfono destro (Right) - microfono posteriore (Rear) - alimentazione (Vin) - motore alto/basso (Tilt) - collegamento con pulse (Touch) - motore destra/sinistra (Pan) A sinistra dall'alto in basso - microfono sinistro (Mic Left) - encoder alto/basso (Enc Tilt) - encoder destra/sinistra (Enc Pan). In basso da sinistra a destra - bus di comunicazione (bus) - led orecchio destro (Right) - led orecchio sinistro (Left) - collegamento con power (Vout) - led occhio destro (Right) - led occhio sinistro (Left) Reset iniziale e segnalazioni d'errore. La prima operazione svolta quando il modulo è alimentato è un test di funzionamento, o meglio, un'attività di reset, che consiste nell'eseguire in successione alcuni movimenti verticali e orizzontali della testa: il robot alza la testa fino al raggiungimento del fine corsa e la abbassa di due step; ruota la testa a sinistra fino al raggiungimento del fine corsa e la sposta a destra di 6 step. Durante il primo movimento orizzontale e il primo verticale non vengono contati gli step dei dischi encoder, perché la Head Controller non può conoscere la posizione iniziale della testa: il movimento prosegue (teoricamente all'infinito) finché non viene fornito il segnale di file corsa che non è altro che un segnale prolungato di "assenza di step". Se si verificano errori durante il reset si accendono i led degli occhi con questo criterio:
I led della testa. Il modulo Head Controller comanda l'accensione e lo spegnimenti di tutti i led che si trovano nella testa ('occhi' e 'orecchie'), rendendoli utilizzabili anche da tutti gli altri moduli collegati al bus. Ogni e codifica una determinata attività: gli occhi rossi (gialli) lampeggianti sono sintomo di problemi nella rotazione destra/sinistra (alto/basso); gli occhi diventano verdi quando è attiva la Sound Folloer; le orecchie si accendono di blu quando è attivo il modulo vocale. Gestione da tastiera e display. Tramite il tastierino si possono accedere a queste funzioni della scheda head:
Azione --> Testa ---> Destra Testa --> Sinistra
Testa --> Alza Testa --> Abbassa Ancora [ripete l'ultimo comando] Accendi --> Segui Suoni Spegni --> Segui Suoni
Ogni volta che si sfiora la parte alta della testa del robot, l'apposito sensore di sfioramento lo comunica al modulo, il quale, attraverso un bus, trasferisce l'informazione a tutti gli altri e in particolare al modulo Brain&Vision, il quale implementa la rete neurale che gestisce la 'personalità' del robot.  Il sensore di sfioramento presente sulla parte superiore della testa di
I-D01 è un 'sensore di prossimità di tipo capacitivo'. Tecnicamente
parlando, la presenza di un oggetto comporta nel circuito del sensore
una variazione di capacità. Un cambiamento di capacità, a sua volta,
comporta una variazione nella frequenza di oscillazione che
caratterizza alcuni componenti elettronici del sensore: è la
misurazione di questa frequenza che permette al sensore di 'accorgersi'
della presenza di un oggetto. La variazione della capacità dipende
dall'oggetto che si trova vicino al sensore: il corpo umano, ad
esempio, genera una variazione piuttosto intensa. Il sensore di I-D01 è
stato tarato proprio per rilevare una variazione di capacità
riconducibile alla presenza del corpo umano.
Il sensore di sfioramento presente sulla parte superiore della testa di
I-D01 è un 'sensore di prossimità di tipo capacitivo'. Tecnicamente
parlando, la presenza di un oggetto comporta nel circuito del sensore
una variazione di capacità. Un cambiamento di capacità, a sua volta,
comporta una variazione nella frequenza di oscillazione che
caratterizza alcuni componenti elettronici del sensore: è la
misurazione di questa frequenza che permette al sensore di 'accorgersi'
della presenza di un oggetto. La variazione della capacità dipende
dall'oggetto che si trova vicino al sensore: il corpo umano, ad
esempio, genera una variazione piuttosto intensa. Il sensore di I-D01 è
stato tarato proprio per rilevare una variazione di capacità
riconducibile alla presenza del corpo umano.
Con l'installazione della rete neurale (compresa nel sistema operativo della Brain&Vision a partire dalla versione 1.2) il sensore di sfioramento è attivo solo se la rete neurale è attiva; è comunque possibile programmare in c-like il suo funzionamento, con o senza rete neurale.
 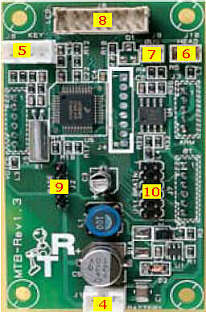
1 - ARMS: connettore per cavo a 5 fili rossi della scheda Arms 2 - VOICE: connettore per cavo a 6 fili bianchi della scheda Voice 3 - BLUETOOTH: connettore per cavo a 6 fili blu della scheda Bluetooth 4 - BATTERY: connettore per cavo a 3 fili (rosso, nero, bianco) di alimentazione proveniente dal marsupio 5 - KEY: connettore per cavo a 4 fili (rosso, viola, blu, giallo) del tastierino 6 - HEAD: connettore per cavo a 3 fili bianchi dell'alimentazione della testa 7 - BUS: connettore per cavo a 2 fili bianchi del bus della testa 8 - LCD: connettore per cavo a 16 fili policromi del Display 9 - BASE: connettore nero a 5 socket per inserzione diretta della scheda Base 10 - B&V: connettore nero a 12 socket per inserzione diretta dalla Brain&Vision
 Il modulo Bluetooth monta un microcontrollore LMX9830A della National,
compatibile con le specifiche dette 'Bluetooth 1.2 Core Specification'.
Si tratta di un dispositivo di classe 2: l'effettiva distanza
coperta e la qualità del collegamento dipendono da molti fattori, tra
cui la presenza di ostacoli o di disturbi elettromagnetici e il
dispositivo utilizzato come controparte nella connessione. Solitamente
la comunicazione tra dispositivi BT di classe 2 è garantita per un
raggio d'azione di 10 metri, che può estendersi fino a 30 metri in
campo aperto e in assenza di disturbi esterni.
Il modulo Bluetooth monta un microcontrollore LMX9830A della National,
compatibile con le specifiche dette 'Bluetooth 1.2 Core Specification'.
Si tratta di un dispositivo di classe 2: l'effettiva distanza
coperta e la qualità del collegamento dipendono da molti fattori, tra
cui la presenza di ostacoli o di disturbi elettromagnetici e il
dispositivo utilizzato come controparte nella connessione. Solitamente
la comunicazione tra dispositivi BT di classe 2 è garantita per un
raggio d'azione di 10 metri, che può estendersi fino a 30 metri in
campo aperto e in assenza di disturbi esterni.
Questa scheda è attualmente in commercio con la sigla "Bluetooth Serial Module RBT-001"; è l'unico modulo elettronico di I-D01 che non presenta un hardware dedicato al robot, cioé il suo funzionamento non è strettamente legato all'architettura di I-D01. Questo modulo può quindi essere utilizzato per qualunque applicazione che richieda una comunicazione wireless; i rivenditori di questa scheda mettono a disposizione anche dei programmi applicativi e degli esempi di codice scritti in C o Pbasic per imparare ad usare la scheda.

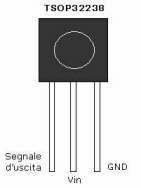
(1) VCOM: connettore per cavo a 6 fili bianchi che collegano il modulo vocale con la Motherboard (2) SPEAKER: connettore per cavo a due fili gialli dello speaker (3) MIC: connettore per cavo del microfono a due fili (bianco e nero) avvolti da una guaina nera  Elenco parole / suoni che il robot può pronunciare / emettere
Elenco parole che il robot può comprendere (word sets) Elenco parole / suoni che il robot può pronunciare / emettere
Elenco parole che il robot può comprendere (word sets)
Accensione spegnimento. Col tasto destro alla voce Voice del menù Diagnostic è possibile accendere/spegnere il modulo vocale e impostare il livello di confidenza. Microfono e speaker del robot. I-D01 dispone di 4 microfoni e uno speaker. Tre microfoni sono inseriti dentro la testa; servono per realizzare la funzione Sound Follower e sono gestiti dal modulo Head Controller. Il quarto microfono è posto sul lato destro del petto e serve per ascoltare la voce. Lo speaker si trova nella pancia e serve per riprodurre suoni la cui frequenza si trova nell'intervallo tipico della riproduzione vocale; è caratterizzato da un'impedenza pari a 8 ohm e da una potenza in uscita di circa 0,25 watt. Il microfono sul petto e lo speaker sono gestiti dal modulo vocale. Comandi vocali - word sets. I comandi vocali sono costituiti da gruppi di parole, chiamati word sets, che possono essere compresi da I-D01. Servono per dare ordini vocali (ad esempio "braccio destro, abbassa"), oppure per stuzzicare lo stato emotivo implementato dalla rete neurale (ad esempio dicendo: "carino", "brutto", "noioso", ecc...). La scheda vocale contiene tutti i word sets ma ne mette a disposizione solo un numero ristretto; tutti gli altri vengono attivati dalla scheda Brain&Vision; inoltre alcuni comandi vocali che servono per far evolvere lo stato emotivo, vengono riconosciuti solo se è attiva la rete neurale ("bello", "brutto", "carino", ecc...). Livello di confidenza - capacità uditive. Il livello di confidenza serve per impostare le 'capacità uditive' del robot. E' possibile scegliere tra 5 diversi livelli di confidenza che vanno da 0 a 4; il livello 0 è quello meno selettivo, il livello 4 è il più selettivo; impostando il livello 0 il robot riconosce più facilmente le parole ma aumenta la possibilità che riconosca parole sbagliate; il livello di default è 3. Il livello di confidenza è selezionabile con il tasto destro alla voce Voice del menù Diagnostic; il valore scelto è permanente e viene mantenuto anche a robot spento. Questa funzione è attiva a partire dalla versione 1.1 del sistema operativo linux della Brain&Vision. Led delle orecchie - stato di ascolto. Lo stato dei LED delle orecchie è utilizzato da I-D01 per far capire se è in ascolto oppure no.
Analisi di alcuni comandi vocali. Di seguito viene analizzata la logica di comprensione di alcuni word sets, quelli attivi solo con il modulo vocale; lo stesso ragionamento può essere esteso a tutti gli altri word sets. Le parole che costituiscono i comandi vocali sono raggruppate in word set collegati tra di loro come indicato in figura. Un word set è un insieme di parole che I-D01 può capire in un determinato momento; all'inizio è attivo il word set 1, cioé I-D01 può capire solo le parole Azione, Accendi, Spegni, Password, Messaggi, Ciao, Grazie, I-Droid. Se si pronuncia una di queste parole, viene attivato il word set successivo come indicato dalle frecce. Ad esempio dopo la parola Azione, segue il word set 2; dopo la parola Password segue il word set 4, dopo la parola Messaggi segue il word set 8; dopo le parole Ciao, Grazie, I-Droid, non segue un bel niente. I comandi vocali da impartire a I-D01 sono costituiti da 1, 2 o 3 parole. I comandi più semplici sono quelli costituiti da una sola parola come Ciao, Grazie, I-Droid. - pronunciando la parola Ciao, il robot risponde Ciao - pronunciando la parola Grazie, il robot risponde Prego - pronunciando la parola I-droid, il robot risponde Dimmi, oppure Eccomi. Se un comando è costituito da più parole (2 o 3) si procede così: dopo aver pronunciato la prima parola, si aspetta che I-D01 risponda OK; la successiva parola si pronuncia mentre le orecchie lampeggiano. Ad esempio per comandare I-D01 di alzare la testa, si procede così: - pronunciare Azione
- aspettare che I-D01 dica OK - mentre lampeggiano le orecchie, pronunciare Testa - aspettare che I-D01 dica OK - mentre lampeggiano le orecchie, pronunciare Alza 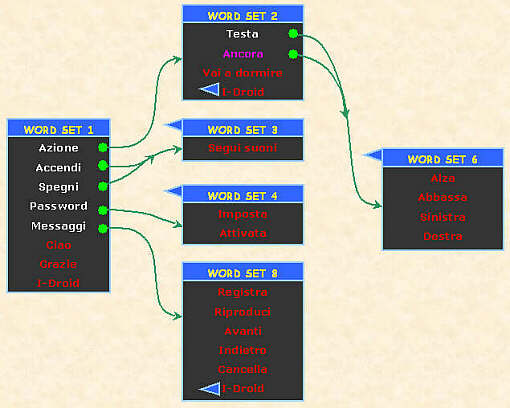
Password biometrica. La parte di riconoscimento vocale è 'speaker independent', vale a dire che il robot potrà essere comandato da qualsiasi persona. È però possibile configurare e attivare una password biometrica in modo che il robot non risponda più a utenti 'estranei' finché non viene riattivato dalla persona che ha configurato la password. Questo processo viene detto 'speaker verification'. L'impostazione avviene pronunciando, partendo dal Word Set 1, 'password' -> 'imposta': I-D01 chiederà di pronunciare la password (che verrà memorizzata) e poi di ripeterla per confermarla. L'attivazione vera e propria viene effettuata con 'password' -> 'attivata': da questo momento il robot resterà in attesa di sentire la parola corretta pronunciata dalla persona giusta. Per cancellare una password impostata in precedenza basta indurre in errore la procedura di impostazione: attraverso 'password' -> 'imposta' si accede alla registrazione della password; pronunciando poi due parole diverse (una per la registrazione, l'altra per la conferma) I-D01 cancellerà qualsiasi password precedentemente memorizzata, emettendo due 'beep' per segnalarlo. La password viene impostata tramite comandi vocali; la disattivazione avviene tramite il comportamento Password Vocale On/Off del PC Control o Mobile Control. Messaggi vocali. Il modulo voice è in grado di memorizzare fino a 10 messaggi di circa 16 secondi ciascuno. La gestione dei messaggi può essere fatta in due modi:
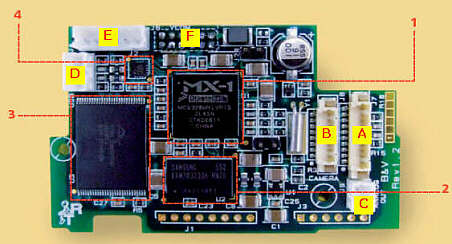
(A) CAMERA J7: cavo a 10 fili blu della CMOS (B) CAMERA J8: cavo a 8 fili blu della CMOS (C) ANALOG OUT: connettore non usato (D) USB: cavo a tre fili (arancione rosso e marrone) per collegamento USB con scheda di connessione PC-B&V (E) UART: cavo a sei fili (blu, verde, giallo, arancione, rosso e marrone) per collegamento seriale con scheda di connessione PC-B&V (F) VCOM: connettore nero a 12 pin, posto sul retro della scheda per alimentazione e bus. Microprocessore. Il processore della scheda del modulo Brain & Vision è senza dubbio quello più potente a bordo del robot. Commercializzato dalla Freescale, si tratta di un processore DragonBall i.MXL a 32 bit dalle elevate prestazioni, ma anche a basso consumo energetico. La sua alimentazione è di 3V che vengono forniti dalla Motherboard tramite il bus di comunicazione. La sua frequenza di elaborazione è pari a 150 MHz: ciò significa che il processore è in grado di eseguire fino a 150 milioni di istruzioni semplici in un secondo. Esso, inoltre, può interfacciarsi con altri dispositivi tramite vari standard di comunicazione. Per eseguire le elaborazioni a cui è chiamato, il processore fa uso di alcuni registri di memoria interni ad accesso rapido, che vengono usati per la memorizzazione dei dati su cui vengono compiuti i calcoli. Memoria RAM. La 'memoria ad accesso casuale' (o RAM) con cui è equipaggiata la scheda elettronica B&V è prodotta dalla Samsung. Dal punto di vista strettamente elettronico, il dispositivo di memoria è costituito da quattro banchi, ciascuno dei quali può contenere fino a 1.048.576 'parole' ciascuna da 32 bit. Riassumendo e riportando a termini meno 'criptici', si può dire che la capacità totale della RAM è pari a 16 MB, equivalenti a 128 Mb. La gestione dei registri di memoria, realizzati con tecnologia CMOS, viene effettuata in modo da rendere le operazioni di lettura e scrittura dei dati le più veloci possibili. La massima frequenza di funzionamento è pari a circa 133 MHz, anche se essa dipende dalle condizioni di utilizzo. Le tolleranze in termini di temperatura di esercizio sono piuttosto ampie: la RAM può funzionare all'interno dell'intervallo compreso all'incirca tra i -25°C e i +70°C. Memoria Flash. Anche la memoria Flash utilizzata a bordo della scheda B&V, come quella RAM, ha una capacità complessiva pari a 16 MB. Il dispositivo di memoria Flash è prodotto dalla Spansion (azienda leader nel settore delle memorie Flash e collegata ad AMD e Fujitsu). I 128 Mb (equivalenti ai sopra citati 16 MB) sono suddivisi esattamente in 8.388.608 parole da 16 bit ciascuna. I dati vengono scambiati attraverso un bus di comunicazione a 16 bit. L'affidabilità è molto elevata: i dati contenuti nei registri di memoria possono essere mantenuti in media 20 anni. Il tempo di accesso medio ai dati contenuti in memoria è di circa 100 ns, mentre la scrittura di dati avviene con un tempo medio pari a circa 240 μs ogni 16 bit. La temperatura alla quale il dispositivo di memoria Flash può funzionare è compresa tra circa -40°C e +85°C. Transceiver USB. La scheda elettronica del modulo Brain&Vision è dotata di una porta di collegamento USB, che permetterà la programmazione della scheda stessa. Per rendere possibile la comunicazione tra i dispositivi elettronici posti all'interno della scheda e il cavo USB che sarà collegato, è presente sulla scheda stessa un dispositivo transceiver USB. La parola 'transceiver' nasce dalla contrazione dei due termini inglesi transmitter ('trasmittente') e receiver ('ricevente'). In effetti, il transceiver USB realizza una sorta di traduzione tra il 'linguaggio' proprio dei segnali del cavo USB (o Universal Serial Bus) e quello a 'livelli elettrici logici' gestito invece dal processore. Il transceiver di cui è dotata la scheda elettronica del modulo Brain & Vision permette di ricevere e trasmettere dati con una velocità pari a 12 Mb/s (megabit al secondo). Il dispositivo, inoltre, è compatibile con le Specifiche 1.1 dello standard USB e utilizza segnali digitali sia in ingresso sia in uscita. Dal punto di vista delle temperature di esercizio, anch'esso garantisce ampi margini di tranquillità, potendo operare all'incirca tra i -40°C e i +85°C. Scheda PC-B&V. Serve per interfacciare il modulo B&V con il PC; è indispensabile per eseguire queste funzioni:
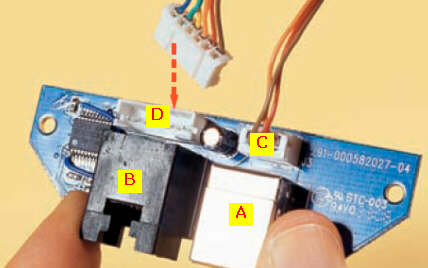
(A) Porta per cavo USB di connessione con il PC (B) Porta per cavo seriale di connessione con il PC (C) Cavo a 3 fili per connessione USB con la scheda B&V (D) Cavo a 6 fili per connessione seriale con la scheda B&V Gestione da tastierino e display. Tramite il tastierino si possono accedere a queste funzioni della scheda Brain&Vision:
Azione --> Foto Giochiamo --> Seguimi / Nascondino / Caccia al tesoro
Comando -- > Zero / Uno / Due / ...... Nove / Dieci Ancora [ripete l'ultimo comando] Accendi --> Visione Spegni --> Visione Sistema operativo Linux Per quanto riguarda l'installazione e l'uso del s.o. Linux vedi pagina software. Analisi e riutilizzo della scheda B&V. Segnalo il link ad un sito molto interessante che descrive come sviluppare e riutilizzare la scheda per applicazioni indipendenti dal robot I-D01: http://escogito.altervista.org/arm-ita.html
 I
chip CMOS sono sensori usati per le telecamere digitali (in alternativa
si impiegano anche i CCD). I chip CMOS più evoluti producono quasi la
stessa qualità di immagine dei CCD ma richiedono una potenza circa 100
volte inferiore, il che consente di preservare di molto la durata delle
batterie. Inoltre, un chip CMOS richiede meno circuiti elettrici di
supporto. La CMOS di I-D01 si trova nella testa e viene gestita dalla
Brain&Vision. Le sue funzioni sono: I
chip CMOS sono sensori usati per le telecamere digitali (in alternativa
si impiegano anche i CCD). I chip CMOS più evoluti producono quasi la
stessa qualità di immagine dei CCD ma richiedono una potenza circa 100
volte inferiore, il che consente di preservare di molto la durata delle
batterie. Inoltre, un chip CMOS richiede meno circuiti elettrici di
supporto. La CMOS di I-D01 si trova nella testa e viene gestita dalla
Brain&Vision. Le sue funzioni sono:
Programmi di elaborazione video. La Brain&Vision mette a disposizione alcuni programmi di prova che permettono di inseguire un oggetto o una persona sulla base del e dell'oggetto o della pelle. In assenza della scheda base sono attivi solo 2 programmi:
Foto. A partire dalla versione 1.2 del kernel linux della brain&vision, la CMOS può scattare le foto (risoluzione 640x480); le foto vengono memorizzate in formato jpeg nella memoria flash della scheda B&V e possono essere facilmente recuperate: è sufficiente collegare il robot (quando già acceso) al computer attraverso il cavo USB; in questo modo la porzione di memoria usata per le foto viene vista come un disco esterno accessibile da PC. Comandi vocali Azione --> Giochiamo --> Seguimi / Nascondino / Caccia al tesoro Accendi / Spegni --> Visione (corrisponde a Segui Visione) Gestione da tastierino e display Tramite il tastierino si può accedere a questa funzione della CMOS:
 Reset iniziale e segnalazioni d'errore.
Appena la scheda viene attivata esegue in automatico il reset del
motore del bacino che consiste nel riportare I-D01 in posizione seduto;
questa operazione avviene quindi ad ogni accensione. Reset iniziale e segnalazioni d'errore.
Appena la scheda viene attivata esegue in automatico il reset del
motore del bacino che consiste nel riportare I-D01 in posizione seduto;
questa operazione avviene quindi ad ogni accensione. Controllore PID. Il punto di forza del firmware è l'implementazione del PID, ovvero di un sistema di controllo che monitorizza le velocità. Per "controllo" si intende, in generale, l'azione svolta per portare e mantenere ad un valore prefissato un parametro fisico di un impianto o di un processo - ad esempio la temperatura di un forno, il livello di un fluido in un serbatoio, la velocità di rotazione di un motore, ecc. Il controllo di tipo PID è caratterizzato dall'utilizzo combinato di tre funzioni di tipo Proporzionale, Integrale e Derivativo - da cui l'acronimo PID. Lo scopo del controllo PID in I-D01 è di far girare le ruote a determinate velocità, indipendentemente dal variare delle condizioni (diffente assemblaggio, tolleranze sulla meccanica, quantità di grasso sugli ingranaggi, tipo di pile, peso del robot, ecc...). Nei casi specifici in cui viene richiesto di procedere in linea retta (avanti o indietro), lo scopo del PID è quello di eguagliare le velocità dei motori; ciò avviene riducendo la velocità più alta a quella più bassa; questo avviene solo se la differenza tra le due velocità non è superiore al 20%. E' importante quindi non avere particolari attriti tra gli ingranaggi per permettere al PID di esplicare la sua azione senza penalizzare troppo la velocità di locomozione. Velocità delle ruote motrici. Le ruote possono procedere con diversi gradi di velocità che vanno all'incirca da 13.5cm/s a 20cm/s con controllo PID e fino a 30cm/s senza controllo. Il programmi applicativi forniti con il software di I-D01 utilizzano solo la velocità controllata che per default è quella minima (13.5cm/s); con i programmi di telecontrollo è possibile passare a 20cm/s. Con i comandi vocali, I-D01 si muove solamente con la velocità minima e per un tot di secondi (non esiste il comando vocale che arresta il movimento delle ruote). Tramite programmazione, agendo sui comandi I2C, è possibile escludere l'azione del PID e quindi portare la velocità di locomozione fino a 30cm/s; ma in tal caso non vi è alcun controllo sulla velocità. Per variare la velocità, i motori delle ruote sono alimentati in PWM, ovvero le tensioni sono modulate ad ampiezza di impulso. La risultate della modulazione è una tensione media di circa 3,4V. Sistemi di protezione. Il firmware della scheda base implementa due sistemi di protezione:
Azione --> Base ---> Avanti Base --> Indietro
Base --> Sinistra Base --> Destra Base --> Alza Base --> Abbassa Ancora [ripete l'ultimo comando]. Accendi --> Evita Ostacoli Spegni --> Evita Ostacoli Tramite comandi vocali I-D01 si muove solo alla velocità minima e per 50cm alla volta.
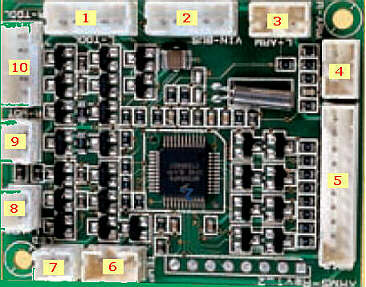 (1) L-TOOL: connettore per cavo a 5 fili giallo per l'espansione del braccio sinistro (1) L-TOOL: connettore per cavo a 5 fili giallo per l'espansione del braccio sinistro
(2) VIN-BUS: connettore per cavo a 5 fili rossi per l'alimentazione e il bus (3) L-ARM: connettore per cavo a 3 fili (rosso, giallo, blu) dell'encoder del braccio sinistro (4) R-ARM: connettore per cavo a 3 fili (rosso, giallo, marrone) dell'encoder del braccio destro (5) GPIO: connettore per cavo a 10 fili policromatici delle uscite del marsupio (6) TEMP: connettore per cavo a tre fili (nero, giallo e arancione) del sensore di temperatura (7) LED: connettore per cavo a due fili (bianco rosso) dei ledi di posizione (8) L-MOT: connettore per cavo a due fili (bianco giallo) del motore del braccio sinistro (9) R-MOT: connettore per cavo a due fili (bianco marrone) del motore del braccio destro (10) R-TOOL: connettore per cavo a 5 fili arancione per l'espansione del braccio destro Test iniziale e segnalazioni d'errore. La prima operazione svolta quando il modulo è alimentato è un test di funzionamento, o meglio, un'attività di reset, che consiste nell'eseguire in successione alcuni movimenti delle braccia: alza un po' il braccio sinistro e lo abbassa fino a fine corsa; poi esegue la stessa cosa per il braccio destro. Se su un braccio è applicato un eventuale tool, come ad esempio la torcia, il test inizia accendendo e spegnendo velocemente il tool e successivamente esegue il movimento del braccio. Se il modulo Arms rileva un problema, tale informazione viene fornita dal robot tramite una scritta sul display e il lampeggio delle luci di posizione, secondo la casistica seguente.
Sistema di protezione. Il firmware della scheda arms implementa un sistema di protezione basato sugli assorbimenti: se per caso viene rilevato un elevato assorbimento di corrente da parte dei motori, questi vengono bloccati automaticamente e sul display compare la scritta 'Arms stalled'; a questo punto occorre riavviare la scheda arms resettandola tramite i comandi del tastierino: Diagnostic --> Arms. Se non funziona, allora bisogna spegnere e riaccendere il robot.
I-D01 dispone di tre porte d'espansione controllate dalla scheda ARMS. La porta più 'potente' si trova sul marsupio e serve per realizzare circuiti d'espansione da montare sulla breadboard. Le altre due porte sono collegate sulle braccia e servono per gestire eventuali accessori come la pinza, la torcia, e il telecomando universale.
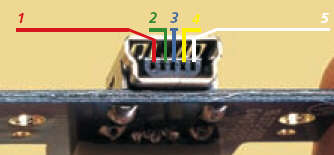
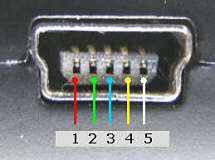
Ogni braccio presenta 3 gradi di mobilità di cui 2 nella spalla e 1 nel gomito; un solo grado è attuato ed è quello che permette al braccio di alzarsi e abbassarsi frontalmente. A mano è possibile alzare lateralmente le braccia e fissare l'angolo del gomito. I movimenti attuati avvengono tramite due scatole motore collocate all'interno del torso e controllate dalla scheda ARMS. Ogni braccio termina con una cavità a forma di croce e un pulsante laterale che permettono l'aggancio meccanico di eventuali accessori, e una mini porta USB per il loro collegamento elettronico.   
Gestione da tastierino e display Tramite il tastierino si può accedere a queste funzioni della scheda arms:
Azione --> Braccio destro ---> Alza / Abbassa / Accendi / Spegni Braccio sinistro ---> Alza / Abbassa / Accendi / Spegni
Temperatura Ancora [ripete l'ultimo comando] Accendi --> Tool sinistro / Tool destro [corrisponde ad Azione-->Braccio dx/sn --> Accendi] Spegni --> Tool sinistro / Tool destro [corrisponde ad Azione-->Braccio dx/sn --> Spegni] Accendi --> Luci Spegni --> Luci
Le porte di espansione delle braccia si trovano sulla parte superiore degli avambracci; si presentano come connettori mini USB, ma utilizzano i pin in modo diverso dai dispositivi basati su tale standard, con i quali, perciò, non sono compatibili. Ogni mini porta presenta cinque socket, che servono per l'alimentazione degli accessori e per lo scambio di informazioni. Gli accessori che sfruttano queste porte sono la torcia e il telecomando universale che si collegano utilizzando un cavetto maschio mini USB. La torcia può essere collegata indifferentemente sul braccio sinistro o destro; il telecomando solo sul braccio sinistro. Nell'ultima fase di costruzione del robot, l'avambraccio destro viene completamente sostituito con la pinza; la configurazione finale è pertanto questa:
Comandi vocali:
 Il
trasmettitore TSOP viene fatto funzionare a frequenza tra i 30 e i
56 kHz, a secondo della procedura di apprendimento e dei dispositivi da
comandare. Nella parte frontale della scatola, davanti al circuito
trasmettitore / ricevitore, è presente un tappo circolare fatto di
materiale opaco che lascia passare solo i raggi infrarossi, in modo da
evitare interferenze con altre sorgenti luminose. Il
trasmettitore TSOP viene fatto funzionare a frequenza tra i 30 e i
56 kHz, a secondo della procedura di apprendimento e dei dispositivi da
comandare. Nella parte frontale della scatola, davanti al circuito
trasmettitore / ricevitore, è presente un tappo circolare fatto di
materiale opaco che lascia passare solo i raggi infrarossi, in modo da
evitare interferenze con altre sorgenti luminose.
 La
pinza è costituita da tre dita di cui due fisse e una opponibile
movimentata da un motore elettrico, che consente di afferrare
piccoli oggetti. L'apertura massima è di circa 5cm; il dito opponibile
può muoversi fino a chiudere completamente la pinza. A differenza degli
altri accessori, la pinza sostituisce completamente l'avambraccio
destro ed è progettate per funzionare solo a destra; non si può quindi
montarla sul braccio sinistro. La pinza è controllata da un scheda
interna al braccio, chiamata scheda Hand che utilizza tutte le linee
della porta USB sinistra, che quindi non può essere più utilizzata da
altri dispositivi. La forza con cui la pinza chiude può essere
impostata tra sei diversi livelli, utilizzando i pulsanti del
tastierino. Per gestire la pinza è necessaria la versione 1.5 del
Kernel linux della B&V. La
pinza è costituita da tre dita di cui due fisse e una opponibile
movimentata da un motore elettrico, che consente di afferrare
piccoli oggetti. L'apertura massima è di circa 5cm; il dito opponibile
può muoversi fino a chiudere completamente la pinza. A differenza degli
altri accessori, la pinza sostituisce completamente l'avambraccio
destro ed è progettate per funzionare solo a destra; non si può quindi
montarla sul braccio sinistro. La pinza è controllata da un scheda
interna al braccio, chiamata scheda Hand che utilizza tutte le linee
della porta USB sinistra, che quindi non può essere più utilizzata da
altri dispositivi. La forza con cui la pinza chiude può essere
impostata tra sei diversi livelli, utilizzando i pulsanti del
tastierino. Per gestire la pinza è necessaria la versione 1.5 del
Kernel linux della B&V.
Comandi vocali: Azione --> Braccio destro ---> Accendi/Spegni Accendi/Spegni --> Tool destro Gestione da tastierino e display:
 Il
sensore di temperatura è gestito dalla scheda ARMS
e fornisce in uscita un segnale elettrico analogico che
indica la misura della temperatura rilevata. La scheda elettronica Arms
provvede ad effettuare una conversione in digitale del segnale
elettrico, in modo da rendere il dato elaborabile. Il modulo B&V, a
sua volta, rileva il valore elaborato dall'ARMS circa 10 volte al
secondo e tramite il bus I2C lo mette a disposizione a tutte le altre
schede; il valore temperatura viene ad esempio acquisito dalla scheda
madre che lo rende visibile sul display, dal modulo Bluetooth che lo
invia al PC Control e Mobile Control, e dal modulo voice in modo che
I-D01 lo possa pronunciare. Il sensore di temperatura è costituito
dall'integrato LM35 (modello DZ). Produce una tensione in uscita che è
direttamente proporzionale alla temperatura in gradi celsius, secondo
questa relazione: Vout = 10mV/C° x T° Il
sensore di temperatura è gestito dalla scheda ARMS
e fornisce in uscita un segnale elettrico analogico che
indica la misura della temperatura rilevata. La scheda elettronica Arms
provvede ad effettuare una conversione in digitale del segnale
elettrico, in modo da rendere il dato elaborabile. Il modulo B&V, a
sua volta, rileva il valore elaborato dall'ARMS circa 10 volte al
secondo e tramite il bus I2C lo mette a disposizione a tutte le altre
schede; il valore temperatura viene ad esempio acquisito dalla scheda
madre che lo rende visibile sul display, dal modulo Bluetooth che lo
invia al PC Control e Mobile Control, e dal modulo voice in modo che
I-D01 lo possa pronunciare. Il sensore di temperatura è costituito
dall'integrato LM35 (modello DZ). Produce una tensione in uscita che è
direttamente proporzionale alla temperatura in gradi celsius, secondo
questa relazione: Vout = 10mV/C° x T°
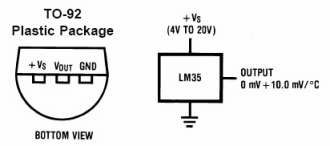
Il suo cavetto a tre fili è collegato ai piedini nel seguente modo: - filo arancione --> VS (tensione di alimentazione) - filo giallo --> Vout (segnale di uscita) - filo nero --> GND (massa) L'integrato LM35 richiede una alimentazione compresa tra 4V e 20V; pertanto non viene alimentata dalla logica della scheda ARMS che è di 3V, ma riceve la stessa tensione che alimenta i motori. Lettura da display. Tramite il tastierino si può leggere la temperatura:
Azione --> Temperatura Ancora [ripete l'ultimo comando]
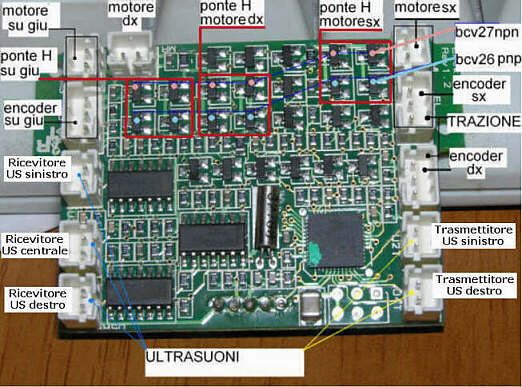
Il sistema di rilevamento ostacoli a ultrasuoni di cui è dotato I-D01 è composto da tre elementi riceventi e due trasmittenti, posizionati in modo alternato nella parte anteriore del marsupio del robot. Pur avendo funzioni diverse, ricevitori ed emettitori hanno un aspetto esterno del tutto simile, dato da un elemento cilindrico la cui base superiore presenta una fitta rete, che protegge i dispositivi interni. Anche in tali elementi interni non vi sono grandi differenze tra emettitori e ricevitori: il principio di funzionamento è sostanzialmente lo stesso, anche se i primi sono ottimizzati per trasmettere onde ultrasoniche a una frequenza di 40 kHz, mentre i secondi lo sono per captare eventuali segnali di quello stesso tipo, sintomo della presenza di ostacoli nelle vicinanze. La frequenza più alta udibile dall'orecchio umano è di circa 20KHz.   
Ricevitore sinistro (cavo
bianco rosso)
Scheda emettitore - ricevitore - emettitore
Ricevitore destro (cavo blu e arancione)
La sensibilità dei ricevitori dipende dall'angolo con cui essi sono 'investiti' dalle onde acustiche: la capacità di ricezione è massima per onde che si trovano all'interno di un cono 'di visione' ampio circa 60°. Gli elementi del sistema a ultrasuoni di I-D01 vengono posti nella parte frontale del marsupio, a formare la sequenza ricevitore, emettitore, ricevitore, emettitore, ricevitore: in questo modo si massimizza la capacità di ricezione delle onde acustiche riflesse da eventuali ostacoli e, quindi, si rende più efficace l'individuazione di ostacoli posti di fronte al robot.  
I dispositivi sensoriali a ultrasuoni con cui I-D01 è equipaggiato sono stati studiati per essere impiegati in una gamma di applicazioni piuttosto ampia, che va anche al di là della robotica: dalla costruzione di telecomandi 'ultrasonici' per elettrodomestici a quella di interruttori 'a vicinanza', dalla realizzazione di sistemi di misurazione del livello dei liquidi nei contenitori a quella di dispositivi di ausilio al parcheggio nelle automobili. Gestione da tastierino e display. Tramite il tastierino si può accedere a queste funzioni relative agli ultrasuoni:
Il marsupio svolge tre funzioni:
Sul lato destro del marsupio si colloca un altro insieme di porte anch'esse messe a disposizione dalla scheda ARMS. Queste porte servono per gestire i circuiti posti sulla breadbord (ad esempio i sensori di luce e i sensori laterali ad infrarossi). Il collegamento tra marsupio e scheda arms avviene tramite un connettore posto sul retro.  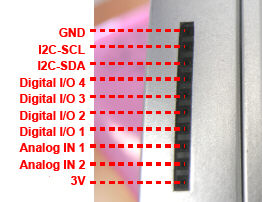
Comandi vocali. Accendi/Spegni --> Uscita uno/due/tre/quattro: setta al valore logico 1/0 la porta corrispondente Caratteristiche elettriche delle porte. Di seguito sono riportate le caratteristiche elettriche degli ingressi/uscite digitali. Sono prima riportati i valori massimi assoluti che non danneggiano l'elettronica ma che non garantiscono il corretto funzionamento. Successivamente sono indicati i valori che vanno rispettati per assicurare un corretto funzionamento del modulo elettronico ARMS a cui i GPIO sono collegati.
La breadboard è una scheda ad inserzione rapida che permette di montare e smontare facilmente i circuiti d'espansione: è dotata di 60 righe di socket organizzate in due colonne. Ogni riga presenta 5 socket collegati tra di loro. Ai lati sono presenti 20 gruppi da 5 soket per l'alimentazione e la massa. La breadboard presenta, nella sua parte posteriore, un adesivo, che permette di farla aderire al coperchio del vano delle batterie.  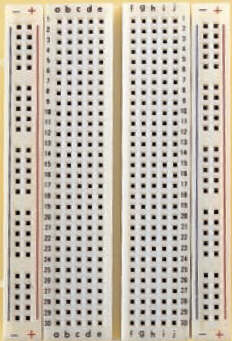
Per iniziare a fare qualche esperimento, oltre alla breadboard, sono stati forniti i seguenti componenti nel corso dell'opera:
 
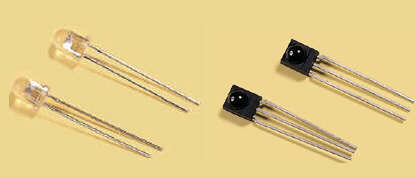
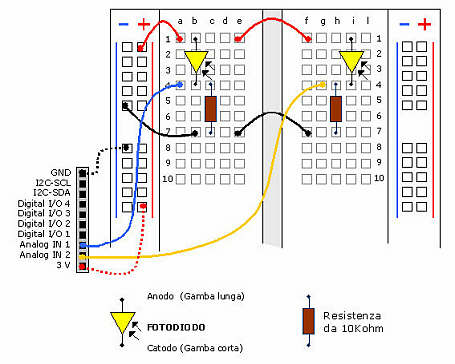
Fotodiodi, resistenze e ponticelli
I trasmettitori e ricevitori ad infrarossi sono gli stessi di quelli usati per la schedina ricevitore/trasmettitore del telecomando ad infrarossi; la differenza sta nel loro utilizzo: i trasmettitori per la breadboard sono utilizzati per rilevare ostacoli laterali e per questo tipo di applicazione è sufficiente trasmettere segnali a una frequenza fissata a priori, che in questo caso è settata a 38 kHz. Invece il trasmettitore del telecomando viene fatto funzionare a frequenze che variano tra 30 e i 56 kHz, a seconda della procedura di apprendimento e dei dispositivi da comandare.
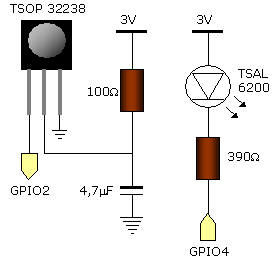
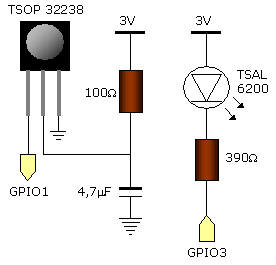
Questo è il circuito proposto nel fascicolo n°83 di I-D01 da montare sulla breadboard; serve per rilevare ostacoli laterali utilizzando sensori ad infrarossi. Il circuito è costituito complessivamente da due parti uguali e simmetriche; guardando la breadboard frontalmente, sul lato sinistro (rispetto a chi guarda) si monta il circuito destro, e sul lato destro quello sinistro.
I componenti principali di un sensore a raggi infrarossi sono il trasmettitore e ricevitore. 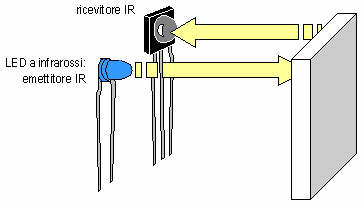
Il trasmettitore è un diodo della serie TSAL6200 che genera luce infrarossa e viene pilotato da un segnale oscillante (uscite breadboard GPIO3 e GPIO4); se la luce infrarossa colpisce un oggetto abbastanza vicino, rimbalza, torna indietro e viene rilevato dal ricevitore. Il ricevitore (TSOP32238) è un circuito integrato sensibile solo alla luce infrarossa (altrimenti sarebbe influenzato da qualunque tipo di luce); in stato di riposo genera un segnale alto che diventa basso solo quando viene colpito da un raggio infrarosso. I segnali prodotti dai ricevitori vengono acquisiti dalle porte GPIO1 e GPIO2 della breadboard.
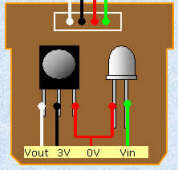
 Questo
è il circuito proposto nel fascicolo n°67 di I-D01 da montare sulla
breadboard; è costituito da due parti simmetriche, ognuna con un
fotodiodo e una resistenza da 10Kohm. Il fotodiodo è un componente
sensibile alla luce; la corrente che lo attraversa aumenta linearmente
all'aumentare della luce incidente (tra 0 e 200lux, per valori maggiore
il sensore perdere sensibilità). Con l'aumentare della corrente che
attraversa il fotodiodo, aumenta anche la caduta di tensione sulla
resistenza; le tensioni delle resistenze dei due semi-circuiti
rappresentano i segnali letti dalla porte Analog 1 e Analog 2.
Facendo il test GPIO sul display è possibile osservare come
variano i due segnali al variare della luce incidente. I fotodiodi
forniti con il kit esibiscono un comportamento lineare. Questo circuito
può essere usato in vari modi, ad esempio per inseguire una
sorgente luminosa o per assumere un determinato comportamento in
funzione della luce o del buio. La disposizione dei componenti sulla
breadboard illustrata nel fascicolo n°67 di I-D01 non è adatta per far
convivere i sensori di luce con gli infrarossi, perché utilizzano dei
socket in comune. Qui di seguito viene mostrato come spostare i sensori
di luce per lasciare spazio ai sensori IR. Questo
è il circuito proposto nel fascicolo n°67 di I-D01 da montare sulla
breadboard; è costituito da due parti simmetriche, ognuna con un
fotodiodo e una resistenza da 10Kohm. Il fotodiodo è un componente
sensibile alla luce; la corrente che lo attraversa aumenta linearmente
all'aumentare della luce incidente (tra 0 e 200lux, per valori maggiore
il sensore perdere sensibilità). Con l'aumentare della corrente che
attraversa il fotodiodo, aumenta anche la caduta di tensione sulla
resistenza; le tensioni delle resistenze dei due semi-circuiti
rappresentano i segnali letti dalla porte Analog 1 e Analog 2.
Facendo il test GPIO sul display è possibile osservare come
variano i due segnali al variare della luce incidente. I fotodiodi
forniti con il kit esibiscono un comportamento lineare. Questo circuito
può essere usato in vari modi, ad esempio per inseguire una
sorgente luminosa o per assumere un determinato comportamento in
funzione della luce o del buio. La disposizione dei componenti sulla
breadboard illustrata nel fascicolo n°67 di I-D01 non è adatta per far
convivere i sensori di luce con gli infrarossi, perché utilizzano dei
socket in comune. Qui di seguito viene mostrato come spostare i sensori
di luce per lasciare spazio ai sensori IR.
Il display permette al robot di mostrare dati relativi al suo stato, di eseguire test diagnostici, di attivare e disattivare varie funzioni. Le voci visualizzate sul display sono organizzate in 3 o 4 menù a seconda dei componenti hardware montati sul robot. I tre tasti posti sotto il display permettono di scorrere i menù, e di attivare/disattivare le varie funzioni.   
Le funzioni a cui si può accedere tramite il tastierino sono organizzate in quatto menù:
Premendo il tasto centrale si fanno scorrere le vari voci interne al menù selezionato Premendo il tasto destro si dà la conferma per eseguire la funziona selezionata La motherboard mette a disposizione un numero finito di funzioni; tutte le altre vengono integrate dal modulo Brain&Vision e aumentano con l'aumentare della versione del sistema operativo Linux. Menù comandi del display (breve)
Menù comandi del display (approfondito)
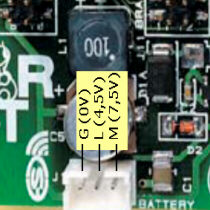
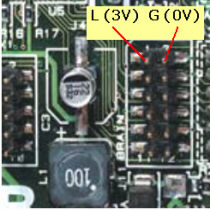
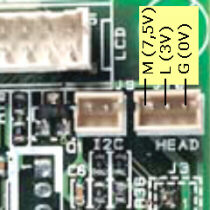
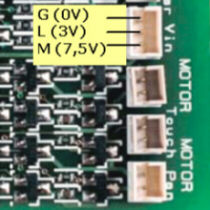
Utilizzando il tester ho ricavato le tensioni di vari connettori; può essere utile per fare i controlli.
Ogni motore di I-D01 presenta un encoder che serve per controllare il movimento. Il dispositivo encoder è costituito da:
 Tutti gli encoder di I-D01 sono di tipo 'relativo', cioé non Tutti gli encoder di I-D01 sono di tipo 'relativo', cioé non   | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||



 "COSTRUISCI IL TUO PERSONAL ROBOT I-D01"
"COSTRUISCI IL TUO PERSONAL ROBOT I-D01"










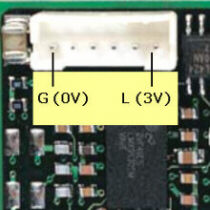
 alimentazione
del robot: contiene un vano che ospita 8 pile AA (ricaricabili o non)
suddivise funzionalmente in due gruppi da 5 pile per i motori e 3
pile per la logica. La tensione per i motori è quindi di 7.5V se si
usano pile usa e getta, o 6V se si usano batterie. La tensione per la
logica è 4.5V se si usano pile usa e getta o 3,6V se si usano
batterie. Nella parte laterale del marsupio trova posto
l'interruttore principale per l'accensione e lo spegnimento di I-D01.
L'alimentazione viene erogata dal connettore vicino al bordo
sinistro: su questo connettore si collega un cavo a tre fili (massa,
logica, motori) che trasporta l'alimentazione al resto del robot
arrivando direttamente alla scheda Motherboard. La
Motherboard stabilizza la tensione logica a 3V e ridistribuisce
questa tensione e quella dei motori alle altre schede. Solo durante la
seconda fase, il cavo di alimentazione arriva direttamente alla scheda
Head Controller (dal momento che manca ancora la Motherboard).
alimentazione
del robot: contiene un vano che ospita 8 pile AA (ricaricabili o non)
suddivise funzionalmente in due gruppi da 5 pile per i motori e 3
pile per la logica. La tensione per i motori è quindi di 7.5V se si
usano pile usa e getta, o 6V se si usano batterie. La tensione per la
logica è 4.5V se si usano pile usa e getta o 3,6V se si usano
batterie. Nella parte laterale del marsupio trova posto
l'interruttore principale per l'accensione e lo spegnimento di I-D01.
L'alimentazione viene erogata dal connettore vicino al bordo
sinistro: su questo connettore si collega un cavo a tre fili (massa,
logica, motori) che trasporta l'alimentazione al resto del robot
arrivando direttamente alla scheda Motherboard. La
Motherboard stabilizza la tensione logica a 3V e ridistribuisce
questa tensione e quella dei motori alle altre schede. Solo durante la
seconda fase, il cavo di alimentazione arriva direttamente alla scheda
Head Controller (dal momento che manca ancora la Motherboard).