![]()
![]()
ultimo aggiornamento 11 giugno 2007
|
|
ultimo aggiornamento 11 giugno 2007 |
|
|
|

|
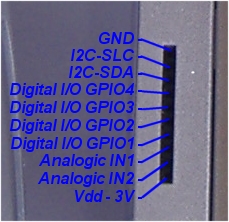
Descrizione delle porte:
|
|
Caratteristiche
elettriche delle porte: Mentre per l'output i valori di corrente e tensioni sono impostati dall'elettronica, in input i valori dipendono dal carico applicato. Per assicurarsi che tutto funzioni correttamente, le tensioni applicate devono appartenere al range [0V, 3V], mentre le correnti al range [-4mA, +4mA]. L'elettronica è protetta fino a valori di I=[-25mA, +25mA] e V = [-0,3V --- 3.3V] ma in tal caso non viene assicurato il corretto funzionamento. |
|
Gestione da
tastierino e display:
Test --> GPIO: il
display mostra una sequenza di cifre: le prime quattro
sono relative alle informazioni provenienti dai GPIO digitali (possono
perciò essere pari a 0 nel caso di valore ‘basso’ o pari a 1 in caso di
valore ‘alto’); il resto della sequenza, invece, si riferisce agli ingressi
analogici e mostra due numeri (uno per l’input 1 e l’altro per l’input 2). |
|
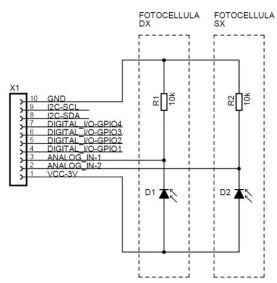
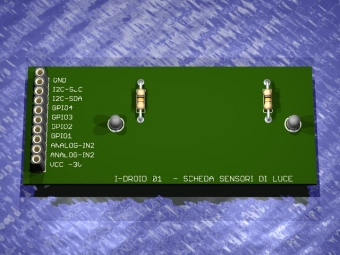
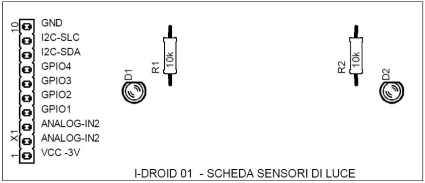
Sensori di luce Per il montaggio dei sensore di luce sono necessari i componenti allegati ai fascicoli n° 66 e 67 (Fase 7 del montaggio del robot) che vanno montati sulla basetta breadboard allegata al fascicolo n° 65.
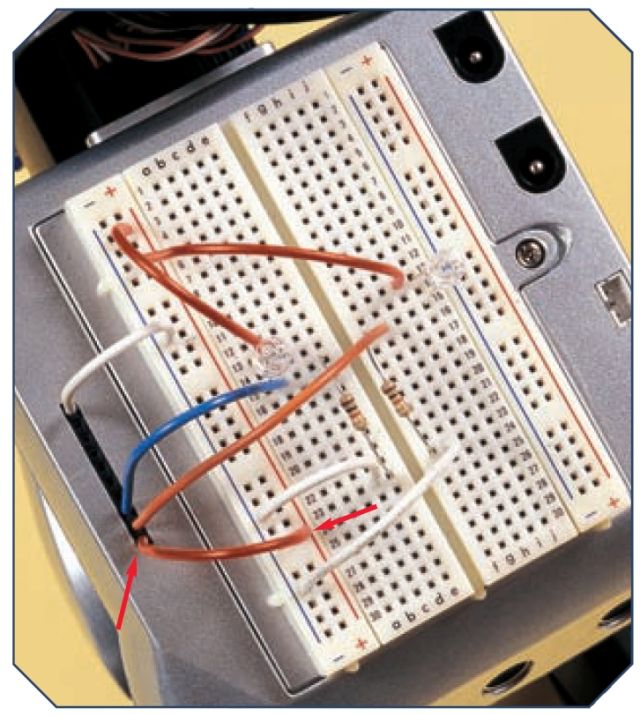
il circuito è mostrato nel fascicolo n°67 (vedere figura sotto) ed è da montare sulla breadboard. Il suo schema, (riportato in basso) è costituito da due parti simmetriche, ognuna con un fotodiodo e una resistenza da 10Kohm.
Le tensioni delle resistenze dei due semi-circuiti rappresentano i segnali
letti dalla porte Analog 1 e Analog 2. Facendo il test GPIO sul
display è possibile osservare come variano i due segnali al variare della
luce incidente.
|
||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
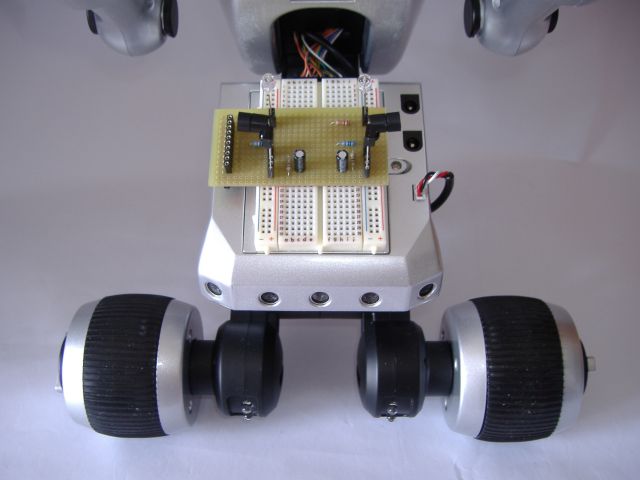
| Programma di gestione sensore di luce: Per testare il funzionamento dei sensori di luce è possibile utilizzare il programma realizzato in (c-like): Insegui luce realizzato da Robotech. Il robot I-D01 segue una sorgente luminosa come una torcia in un ambiente piuttosto buio, sfruttando il circuito descritto sopra Nota. Per far funzionare il programma correttamente la Robotech fornisce questi consigli: i sensori sono molto sensibili, per cui esibiscono un buon comportamento in ambienti bui e con luci localizzate (come quelle delle torce). Quando li testerai, poni il robot sul piedistallo temporaneo, così che le ruote non tocchino terra, e poi indirizza il fascio di luce sui sensori. Per limitare la loro sensibilità puoi anche ricoprirli con del nastro adesivo, oppure inserire dei cappucci di plastica come visibile nella figura sotto.
wh1sp3 ha realizzato un'apposito programma realizzato in visual c-like denominato: Paura del buio
|
|
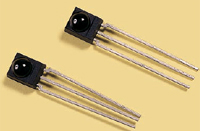
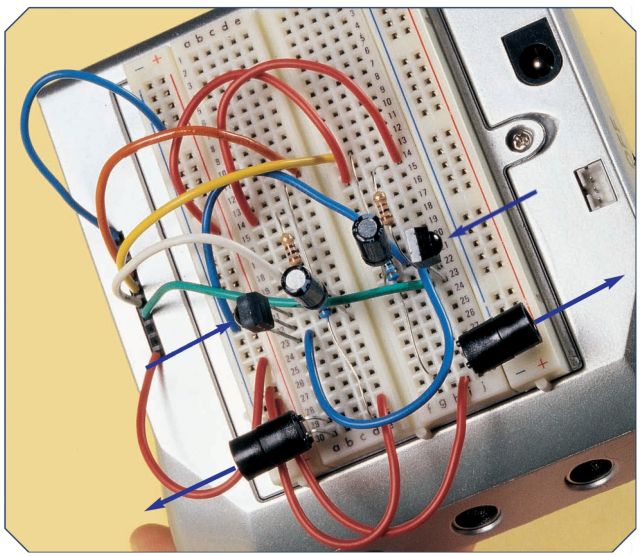
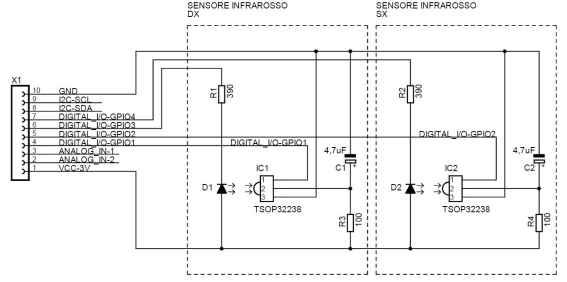
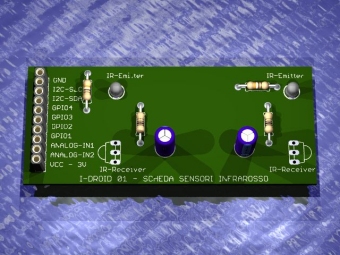
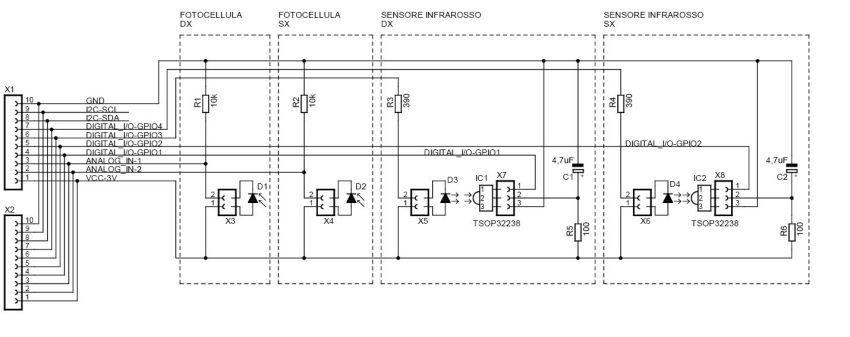
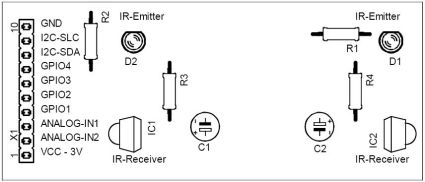
Sensori infrarosso Basandosi sul circuito riportato sui fascicoli n° 81-82 e 83 Figura Questo è il circuito proposto nel fascicolo n°83 di I-droid01 da montare sulla breadboard; serve per rilevare ostacoli laterali utilizzando sensori ad infrarossi. I componenti principali di un sensore a raggi infrarossi sono il trasmettitore e ricevitore.
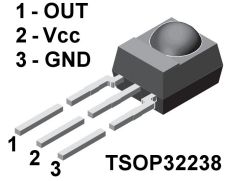
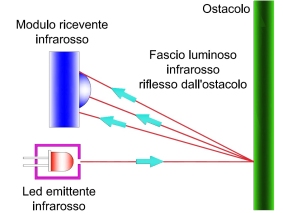
Piedinatura del sensore infrarosso utilizzato Il trasmettitore è un diodo che genera luce infrarossa quando viene sollecitato da un segnale oscillante (uscite breadboard GPIO3 e GPIO4); se la luce infrarossa colpisce un oggetto abbastanza vicino, rimbalza, torna indietro e viene rilevato dal ricevitore. Il ricevitore (TSOP32238) è un circuito integrato sensibile solo alla luce infrarossa (altrimenti sarebbe influenzato da qualunque tipo di luce); in stato di riposo genera un segnale alto che diventa basso solo quando viene colpito da un raggio infrarosso. I segnali prodotti dai ricevitori vengono acquisiti dalle porte GPIO1 e GPIO2 della breadboard.
Il circuito è costituito complessivamente da due parti uguali e simmetriche; guardando la breadboard frontalmente, sul lato sinistro (rispetto a chi guarda) si monta il circuito destro, e sul lato destro quello sinistro. |
||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Programma di gestione sensore infrarosso:
Per testare il funzionamento dei sensori infrarossi è
possibile utilizzare il programma realizzato in (c-like): Infrarossi
realizzato da Robotech.
|
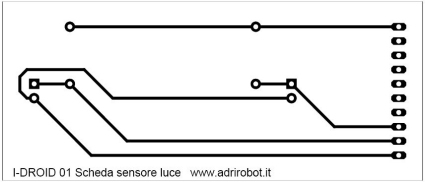
Scheda per sensori di luce
|
|
Per non dover ogni volta rifare il circuito sulla breadboard, ottenendo
un sistema più affidabile e "pulito", è possibile realizzare il circuito
proposto sui fascicoli realizzando un'apposito circuito stampato.
|
||||||||
|---|---|---|---|---|---|---|---|---|---|
CIRCUITO STAMPATO E DISPOSIZIONE DEI COMPONENTI
|
 |
|
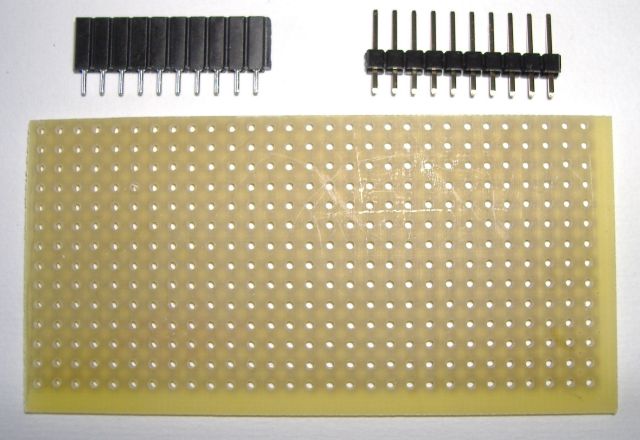
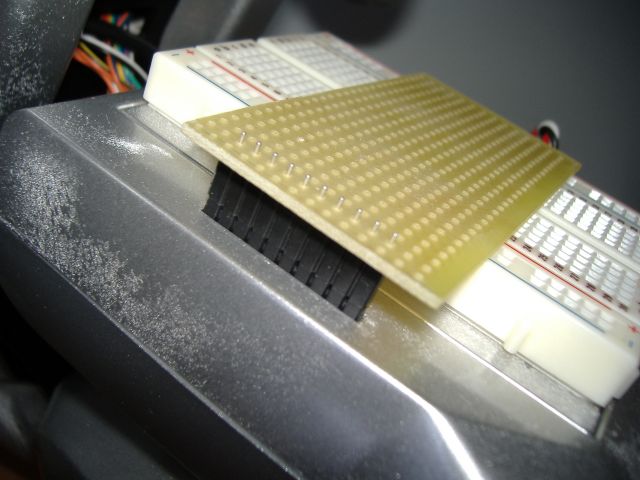
Connettore per schede sensori Componenti necessari per la realizzazione del collegamento della scheda con il connettore sul marsupio: 1) Basetta
circuito stampato |
|
 Installazione connettore tipo 2 |
 Installazione connettore tipo 3 |
 |
 |
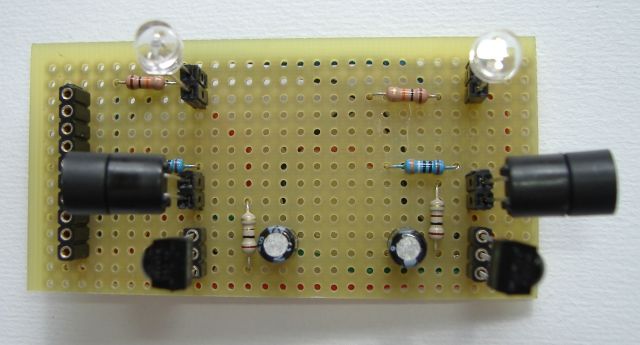
| Vista dei connettori connessi alla basetta millefori utilizzata per la costruzione del prototipo | |
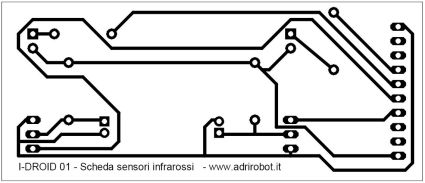
Scheda per sensori infrarossi
|
|
||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
CIRCUITO STAMPATO E DISPOSIZIONE DEI COMPONENTI
 |
 |
|
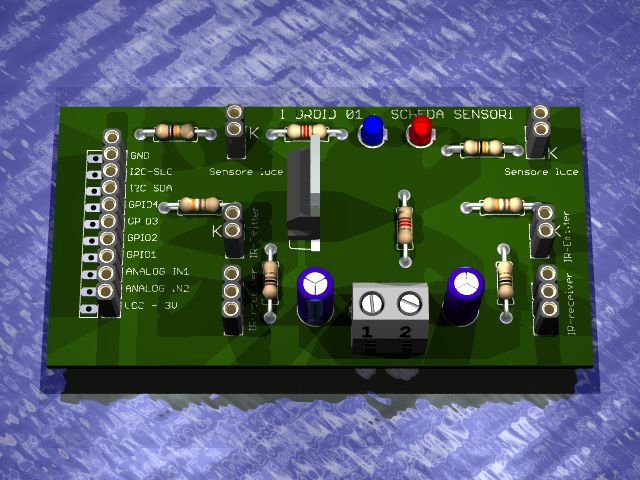
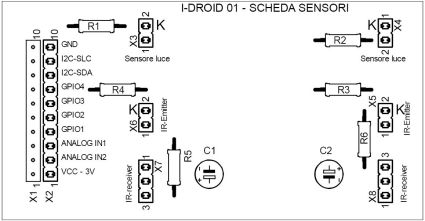
Scheda per sensori infrarossi e luce scheda in via di test attendere conferma per utilizzo Nella figura sotto è visibile la scheda che permette di avere sempre connessi sia i sensori di luce che quelli ad infrarossi. La presenza di connettori femmina permette di riutilizzare eventualmente i componenti su altri circuiti. Il connettore X2 permette di realizzare altri circuiti sulla basetta breadboard. |
|
|
|||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
DISPOSIZIONE DEI COMPONENTI
|
| Elenco revisioni | |
| 11/06/2007 | Inserito preliminare scheda completa |
| 28/05/2007 | Inserito foto prototipo |
| 25/05/2007 | Modificata scheda sensori |
| 23/05/2007 | Emissione preliminare |