![]()


ultimo aggiornamento 25 novembre 2018
|
ultimo aggiornamento 25 novembre 2018 |
|
|
|
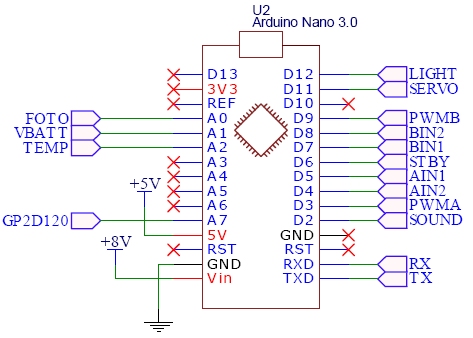
La nuova versione della scheda di controllo del robot Little BOT ha le dimensioni identiche a quella del prototipo pari a di 86x58mm. Dallo schema elettrico si può vedere che su di esso sono presenti le seguenti sezioni:
Sezione alimentazione con modulo elevatore di tensione DC-DC
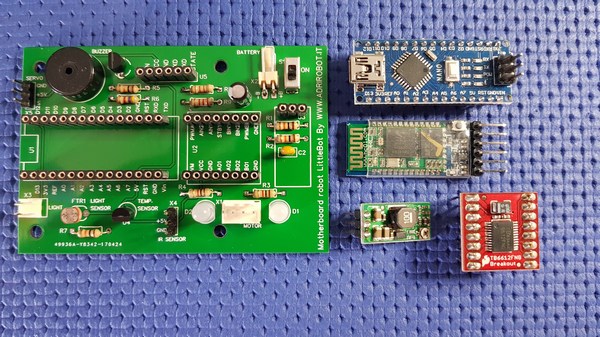
Sezione controller con Arduino Nano
Sezione controllo motori con Motor Driver 1A Dual TB6612FNG
Sezione sensore di luce con fotocellula
Sezione sensore di distanza con IR GP2D120
Sezione connettore servo tipo Hitec HS81
Sezione sensore di temperatura con LM35
Sezione Bluetooth con HC-05

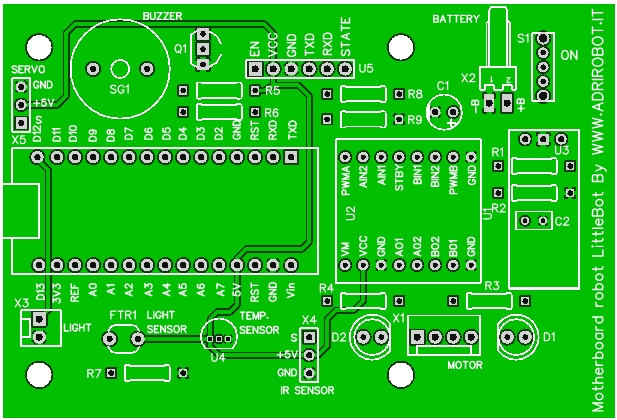
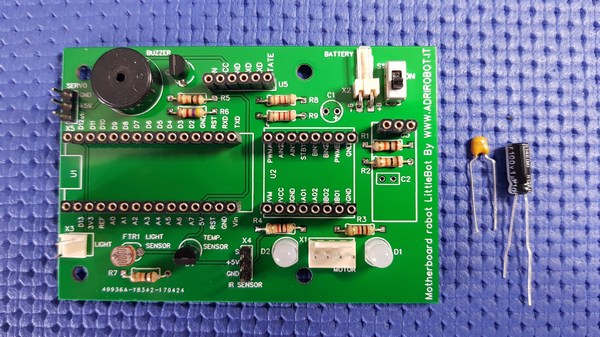
Vista del PCB lato TOP
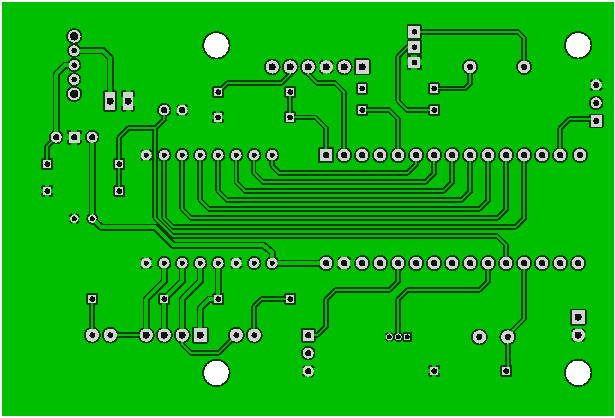
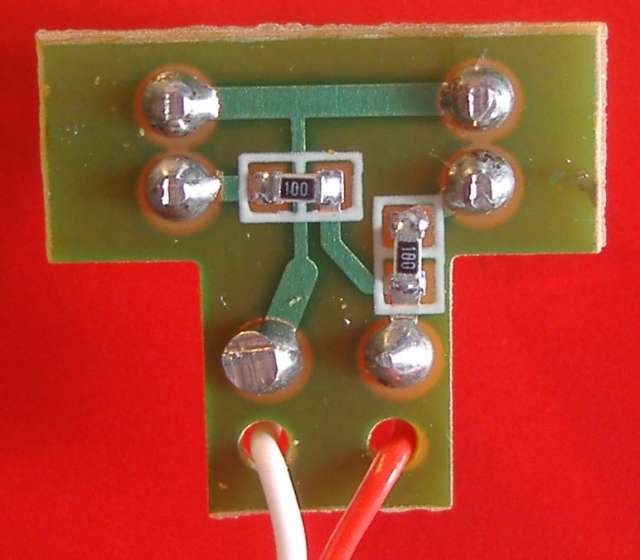
Vista del PCB lato BOTTOM
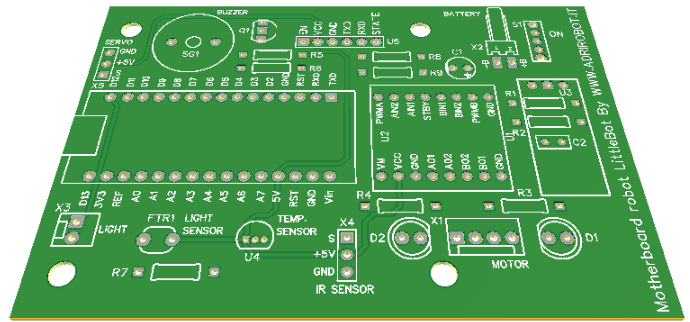
Vista 3D del PCB lato TOP
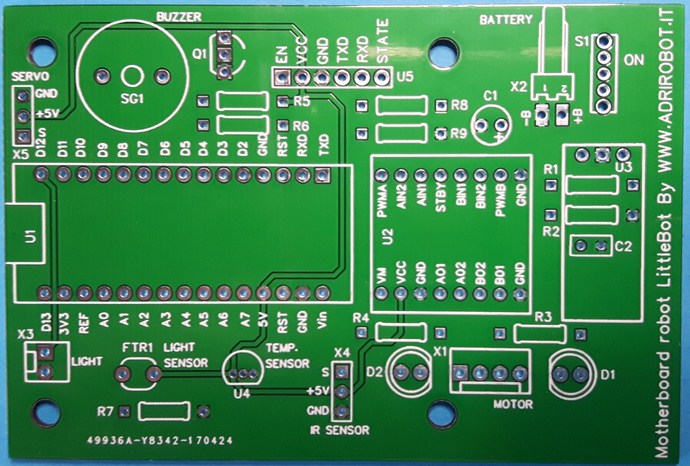
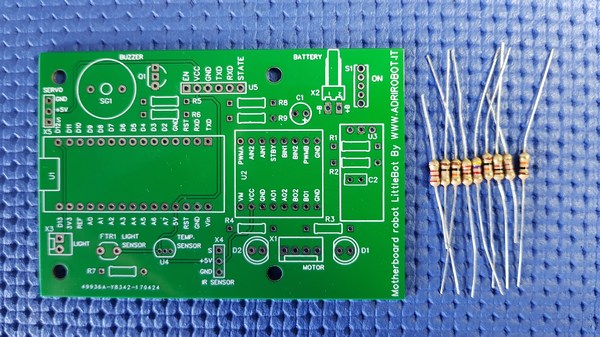
Foto del PCB realizzato da JLCPCB
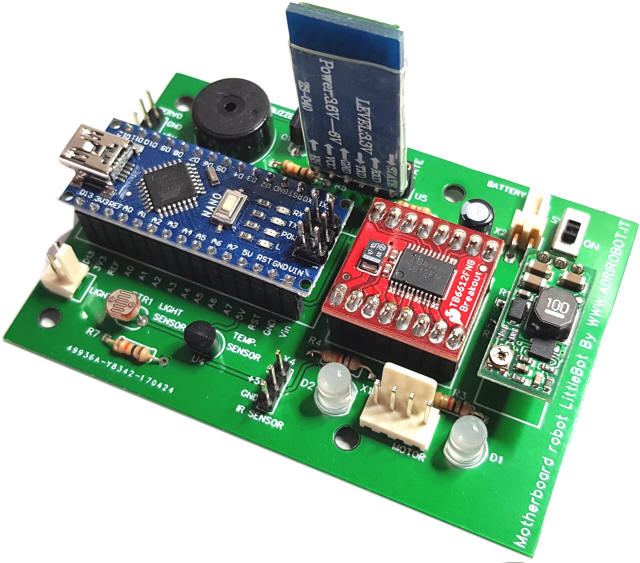
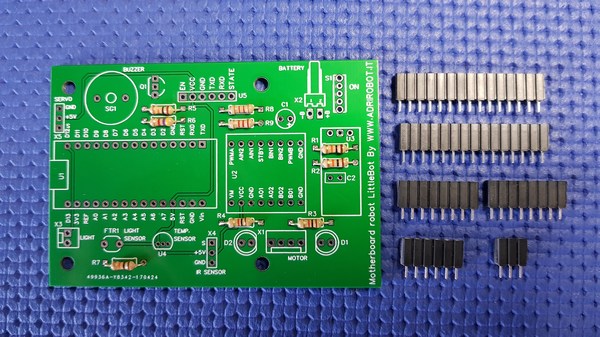
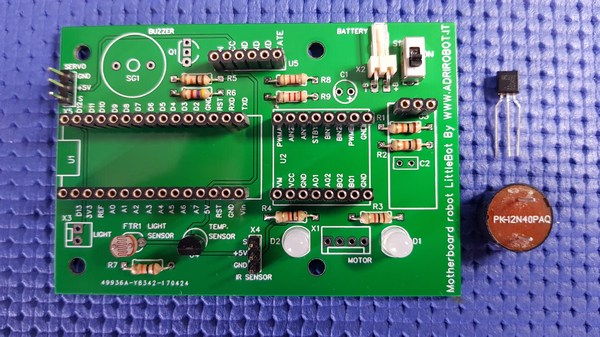
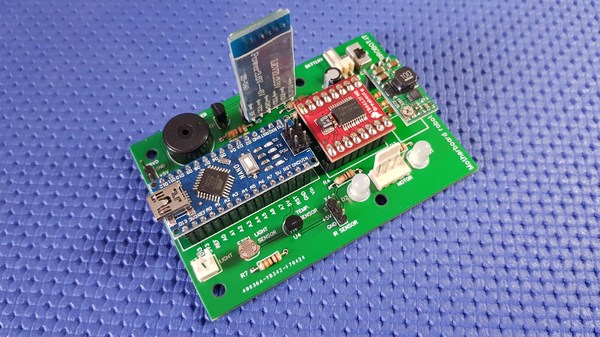
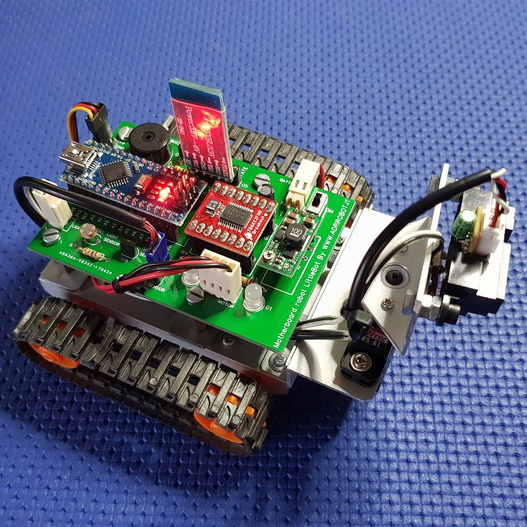
Foto della scheda montata con tutti i componenti
Schema elettrico della nuova
scheda realizzato con il programma EasyEDA
Un servizio per il
disegno di circuiti e la loro simulazione, progettazione e produzione di PCB.
Provalo è gratuito!
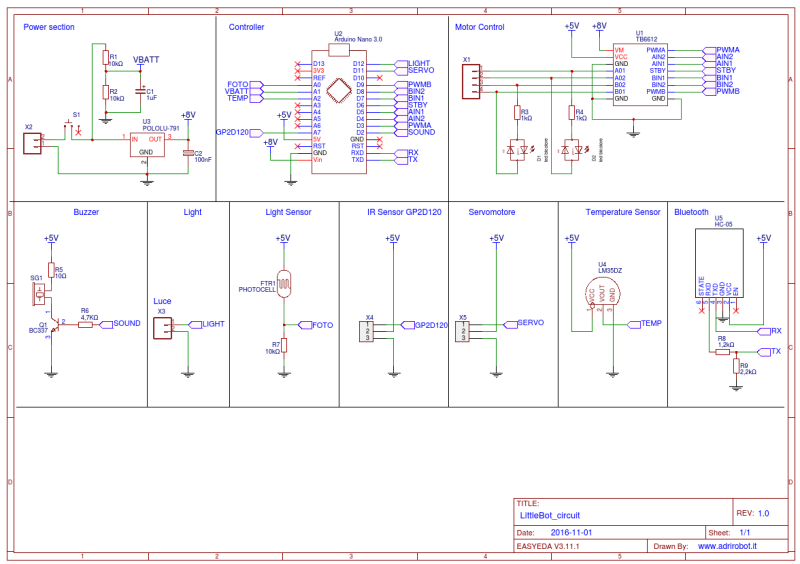
Schema della scheda in formato PDF
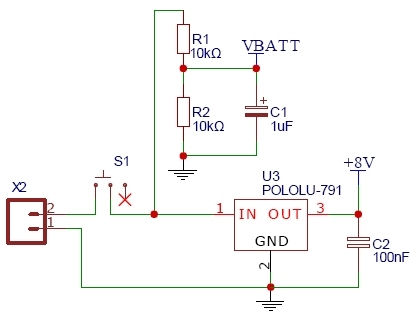
La tensione di alimentazioni è fornita
tramite il connettore X2 tramite una batteria Li-ion 3,7V 1840mA/h.
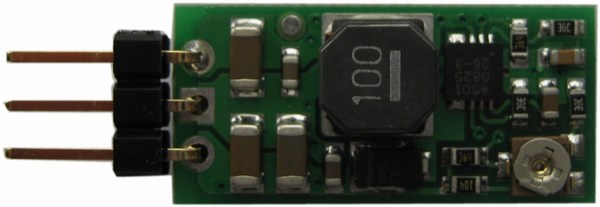
Per elevare la tensione della batteria
a quella di 9V, viene utilizzato un elevatore
mini Convertitore DC/DC prodotto dalla
Pololu
Si basa su un integrato SC4501 Semtech (regolatore di commutazione con Soft-Start- 2 Amp, 2 Boost
MHz ).
Questo integrato accetta una tensione di ingresso
compresa tra 1,5 e 16 Volt, e produce un output regolabile (tramite un
potenziometro) tra 2,5 e 9,5 Volt,
a
circa l'80% di efficienza.
Fa parte del circuito un partitore formato da R1-R2 che viene collegato alla
porta analogica A1 , per monitorare lo stato di carica della batteria
 |
 |
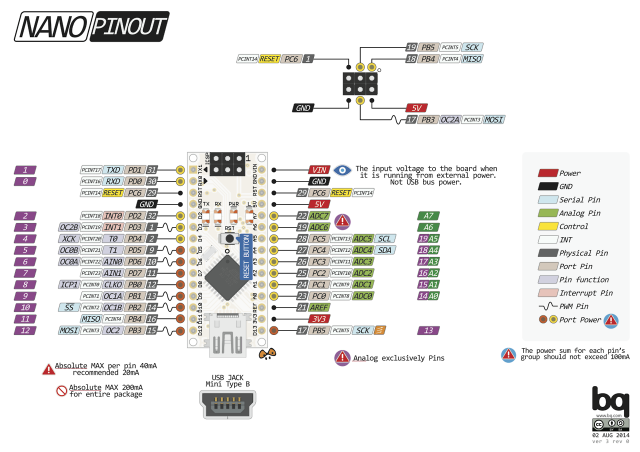
Il controllo del robot è dato da un Arduino Nano a cui sono collegati i vari sensori e moduli di controllo. In particolari cono utilizzati i seguenti pin
| Pin | Funzione |
| Pin Digitale 0 | RX da modulo Bluetooth |
| Pin Digitale 1 | TX da modulo Bluetooth |
|
Pin Digitale 2 |
Buzzer |
|
Pin Digitale 3 |
Velocità motore A PWMA |
|
Pin Digitale 4 |
Comando motore A AIN2 |
|
Pin Digitale 5 |
Comando motore A AIN1 |
|
Pin Digitale 6 |
Standby motori STBY |
|
Pin Digitale 7 |
Comando motore B BIN1 |
|
Pin Digitale 8 |
Comando motore B BIN2 |
|
Pin Digitale 9 |
Velocità motore A PWMB |
|
Pin Digitale 11 |
Comando Servo |
|
Pin Digitale 12 |
Faro |
|
Pin Digitale 13 |
Led su Arduino Nano |
|
Pin Analogico A0 |
Misurazione foto resistenza |
|
Pin Analogico A |
Misurazione tensione batteria |
|
Pin Analogico A2 |
Misurazione temperatura |
|
Pin Analogico A7 |
Misurazione distanza |
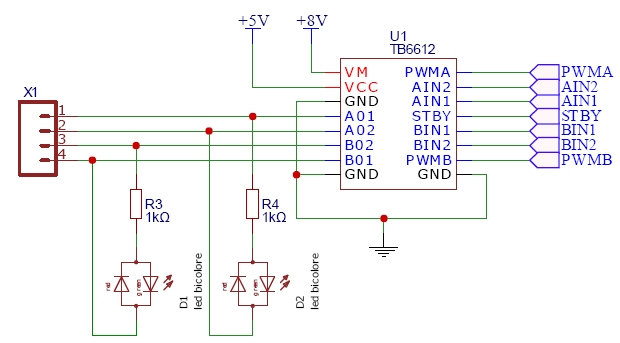
Per pilotare i due motoriduttori è
utilizzato un modulo in cui è utilizzato un integrato
TB6612FNG
che è in grado di pilotare due motori a corrente continua
con una
corrente costante di 1.2A (3.2A di picco) interfacciandosi con un micro
microcontrollore,
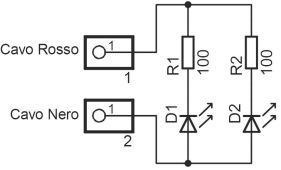
Per il pilotaggio sono utilizzati 7 linee digitali connesse al
processore. Il senso di rotazione è evidenziato da una coppia di
led Bicolore tipo L-57EGW
| L-57EGW Led BI-COLORE 2 PIN | ||
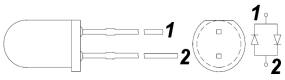 |
Codice RS 228-5720A |
 |
| Piedinatura | Datasheet | Foto |
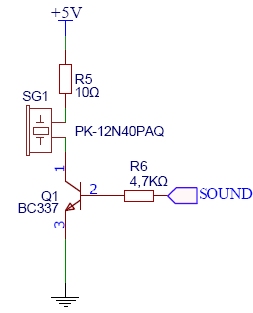
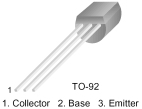
Il robot dispone per eventuali segnalazioni acustiche di un buzzer tipo PK-12N40PAQ pilotato tramite un transistor NPN tipo BC 337.

![]()
| Transistor NPN BC337/338 Switching and Amplifier Applications | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
 |
 |
|
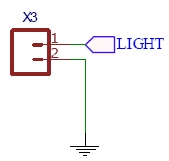
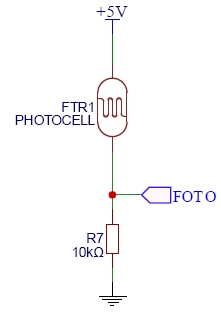
Il robot dispone di un sensore di luce rappresentato da una fotoresistenza. La variazione di resistenza provoca una variazione del valore della tensione che può essere letta dalla porta analogica A0 del processore.


![]()
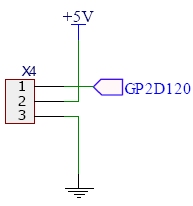
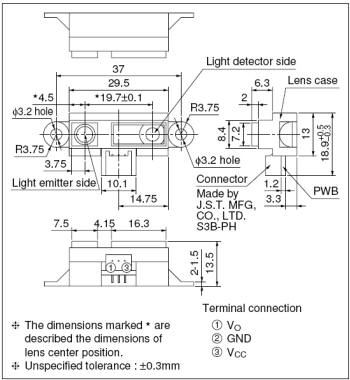
Il robot dispone di un sensore di distanza collegato al connettore X4, si tratta di un sensore a infrarossi della serie GP2D120 prodotto dalla SHARP
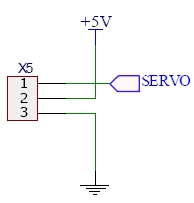
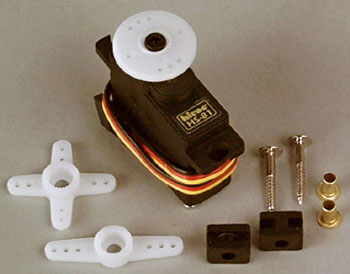
Per muovere il sensore frontale e il faro di illuminazione frontale è presente un servomotore tipo Hitec HS81 collegato al connettore X5 a azionato dalla porta D11
 |
 |
Caratteristiche tecniche del servo HITEC HS-81
|
Control System: |
+Pulse Width Control 1500usec Neutral |
|
Required Pulse: |
3-5 Volt Peak to Peak Square Wave |
|
Operating Voltage: |
4.8-6.0 Volts |
|
Operating Temperature Range: |
-20 to +60 Degree C |
|
Operating Speed (4.8V): |
0.11sec/60° at no load |
|
Operating Speed (6.0V): |
0.09sec/60° at no load |
|
Stall Torque (4.8V): |
36.10 oz/in. (2.6kg.cm) |
|
Stall Torque (6.0V): |
41.66 oz/in. (3kg.cm) |
|
Operating Angle: |
45 Deg. one side pulse traveling 450usec |
|
360 Modifiable: |
No |
|
Direction: |
Clockwise/Pulse Traveling 1500 to 1900usec |
|
Current Drain (4.8V): |
8.8mA/idle and 220mA no load operating |
|
Current Drain (6.0V): |
9.1mA/idle and 280mA no load operating |
|
Dead Band Width: |
8usec |
|
Motor Type: |
3 Pole Ferrite |
|
Potentiometer Drive: |
Direct Drive |
|
Bearing Type: |
None, outer case serves as bearing |
|
Gear Type: |
All Nylon |
|
Connector Wire Length: |
6.29" (160mm) |
|
Dimensions: |
1.17" x 0.47"x 1.16" (29.8 x 12 x 29.6mm) |
|
Weight: |
0.58oz (16.6g) |
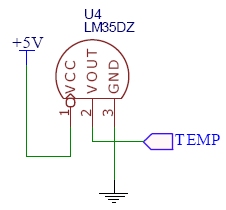
Sezione sensore di temperatura
Il robot dispone di un sensore di temperatura tipo LM35, che fornisce un’uscita una tensione proporzionale alla temperatura rilevata che è pari a 10 mV per ogni grado centigrado che viene letta tramite una porta analogica A2.
 |
 |
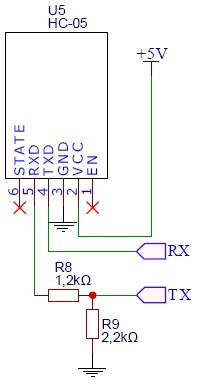
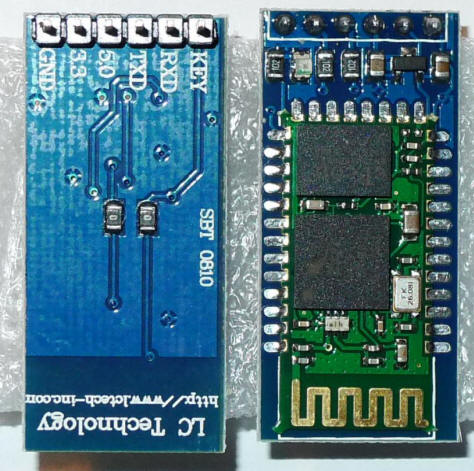
Il connettore U5
permette di collegare un modulo
Bluetooth HC-05
che è uno dei moduli più popolari e poco costosi utilizzati per le
comunicazioni RF, il suo costo è di meno di 10 €.
Il modulo ha una portata di 10 mt, e si imposta facilmente tramite
comandi AT ed
è programmabile sia come master che come slave a differenza del modello HC-06
che è solo utilizzabile come slave.
Per il collegamento sono utilizzati RX, TX, VCC, GND.
Dato che le linee dati sono a 3.3V mentre quelle di Arduino sono a 5V,
sarà necessario inserire un partitore per ridurre la tensione in
ingresso sul pin RX del modulo SH-05, mentre questo non sarà necessario
sul pin TX.
In teoria si ha che se R1=R2 qualsiasi sia il loro valore quello che ottiene è
un partitore di tensione simmetrico ossia applicando in ingresso 10V in uscita
si avranno 5V, variando il rapporto tra R1 ed R2 a favore di R1 ( R1 > R2 ) in
uscita al partitore di tensione si avrà una tensione di uscita inferiore a Vi/2;
variando il rapporto a favore di R2 ( R1 < R2 ) si ottiene una Vo > Vi/2.
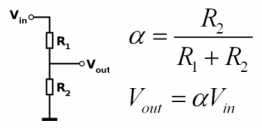
Dato che dobbiamo avere in uscita una tensione inferiore ai 3.3V partendo da una tensione di 5V, si è optato per un valore di R8 pari a 1.2kΩ e R9= 2.2 kΩ, con un rapporto pari a 0,545 il che garantisce un valore della tensione in uscita pari a 3.2V

|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Elenco revisioni | |
|
25/11/2018 |
Aggiornato pagina |
|
20/09/2018 |
Emissione preliminare |