Modulo controllo motori con TB6612FNG
ultimo aggiornamento 16 giugno 2019
|
|
Modulo controllo motori con TB6612FNG ultimo aggiornamento 16 giugno 2019 |
|
|
|
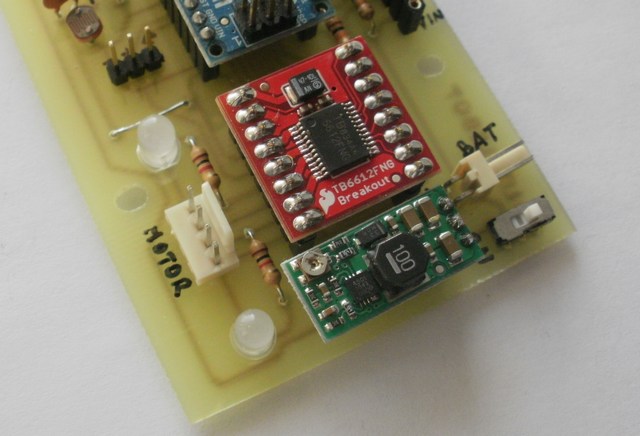
Il modulo di controllo motore è basato sull'integrato TB6612FNG prodotto dalla Toshiba ed è in grado di pilotare due motori a corrente continua con una corrente costante di 1.2A (3.2A di picco) interfacciandosi con un microcontrollore, può anche essere utilizzato per controllare un singolo motore passo-passo bipolare.
|
||||||||||||

L'integrato è un H-bridge di tipo MOSFET molto più efficiente rispetto a un
ponte H-bridge basato su BJT come i più datati L298N o LB1836M Sanyo,
il che consente di avere più corrente per alimentare i motori e meno da trarre
dalla rete logica-
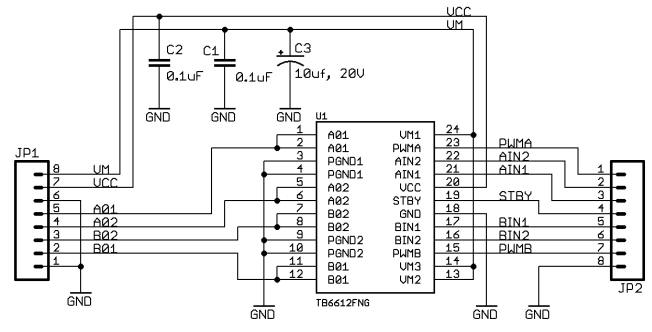
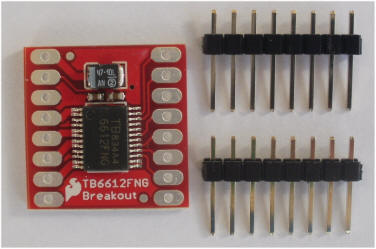
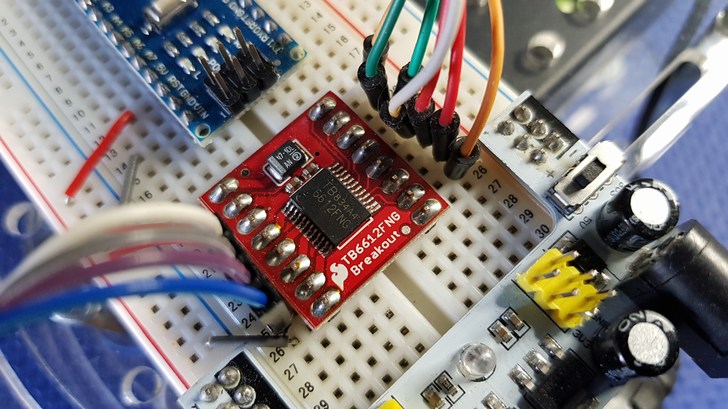
L'integrato è montato su una piccola breakout board il che permette l'accesso
diretto a tutte le caratteristiche del TB6612FNG, sono inoltre presenti i condensatori di
alimentazione e i condensatori di disaccoppiamento su entrambe le linee di
alimentazione
 |
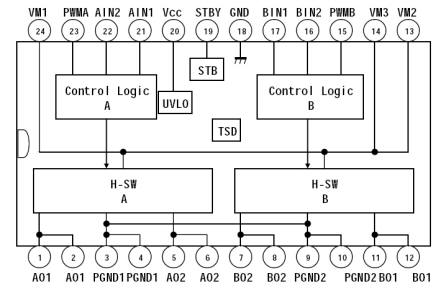 |
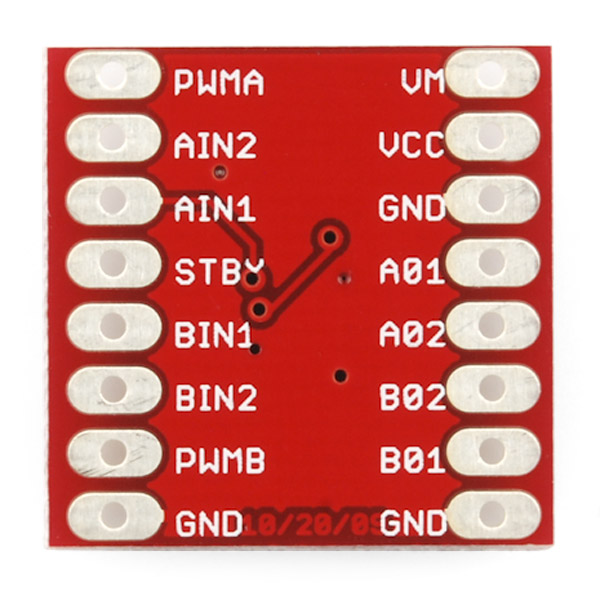
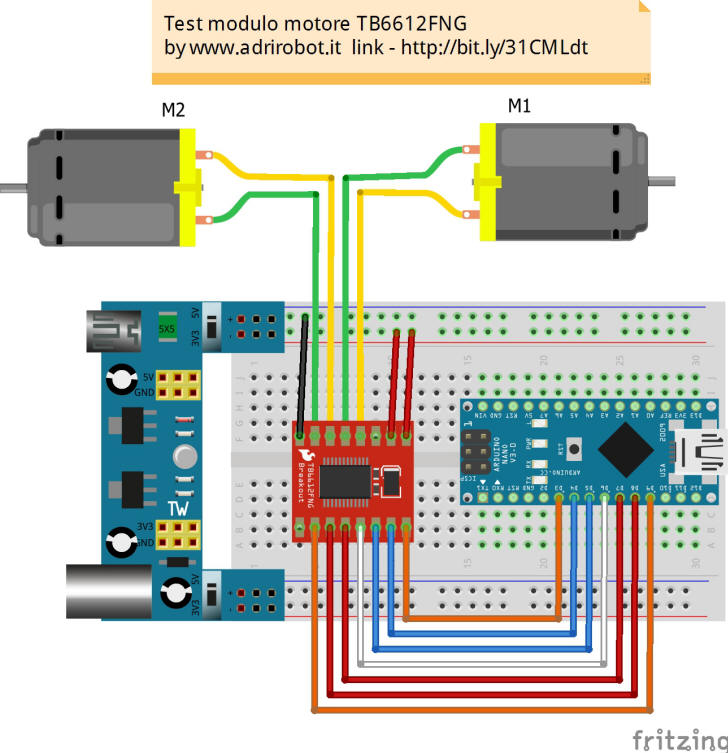
Ognuno dei due canali motore
ha due pin di controllo direzione e un pin di controllo della velocità che
accetta un ingresso PWM con una frequenza fino a 100 kHz. Il pin STBY deve
essere posto a livello alto per porre il driver dalla modalità standby.
Due segnali di ingresso (IN1 e IN2) possono essere utilizzati per comandare il
motore in una delle quattro modalità di funzionamento - rotazione oraria CW,
rotazione antioraria CCW, a freno rapido,
e stop.
La tensione di alimentazione della logica (VCC) può essere nel range di 2.7-5.5VDC,
mentre l'alimentazione del motore (VM) è limitata a una tensione massima di
15VDC.
La corrente di uscita nominale fino a 1,2 A per canale (o fino a 3.2A per
un breve, singolo impulso).
Lo schema del modulo è molto semplice in quanto ricalca quasi fedelmente quello consigliato sul datasheet, oltre
| TB6612FNG Driver IC for Dual DC motor | ||
 |
|
 |
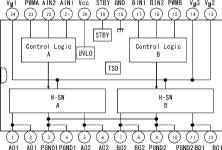
| Piedinatura | Datasheet | Foto dell'integrato |
• Tensione di
alimentazione: 15 V max = VM, VCC = 2.7-5.5V
• Corrente di uscita: Ia = 1,2 A (medio) / 3.2A (picco)
• Controllo standby per risparmiare energia
• CW / CCW / short freno / stop modalità di controllo motore
• Built-in circuito di shutdown termico e circuito a bassa tensione rilevazione
• Spaziatura dei pin 2,5 mm
• Condensatori di filtraggio su entrambe le linee di alimentazione
• Dimensioni: 20.3x20,3mm
|
Nella tabella sottostante la Tabella della verità (Tabella
logica) per l'impostazione dei pin di e relativa uscita. Per facilitare la
gestione si potrà fare uso della speciale
libreria creata dalla Sparkfun che semplifica tutte le operazioni.
Quando le uscite sono impostate su Alto/Basso, il motore funzionerà. Quando sono
impostati su Basso/Alto il motore funzionerà nella direzione opposta. In
entrambi i casi, la velocità è controllata dall'ingresso PWM.
Tabella della verità
|
Non dimenticare che il pin STBY deve essere alto per guidare i motori.
Altri progetti con moduli per il comando di motori
|
|
|
 |
 |
|
|
Motor shield |
Infineon motor Shield |
modkit MotoProto L298 | L293 shield | Scheda con L297 - L298N |
 |
 |
 |
|
 |
| Modulo con L293 | Modulo con doppio L293 | Modulo con ULN2003A | Modulo con L298N | Modulo con LB1836M |
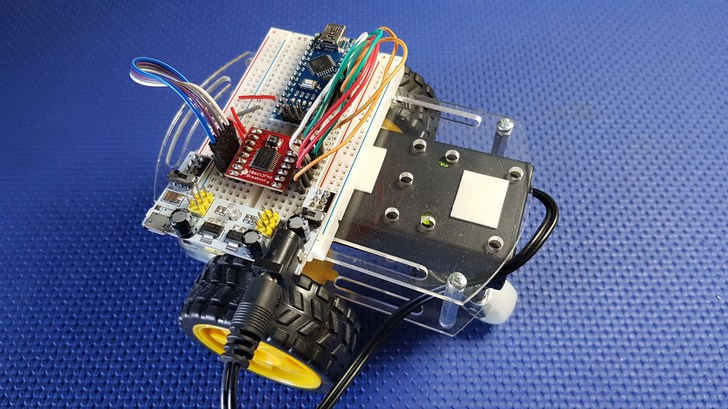
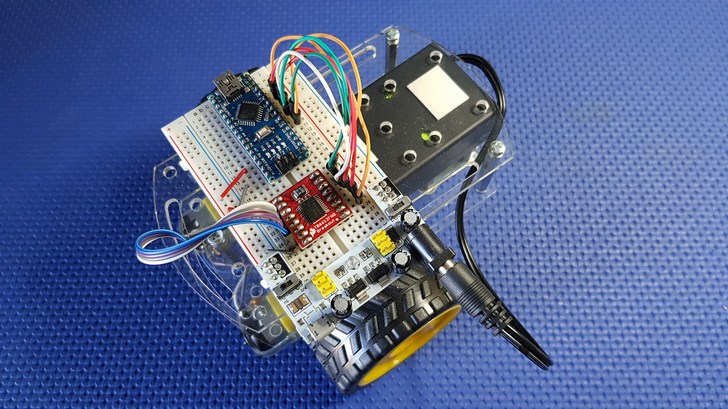
Per il test del modulo, si è pensato di realizzare un piccolo robot, la base è formata Arduino 2wd 150mm mini smart robotics car è una mini base robot che permette di realizzare piccole unità a due ruote motrici, può essere trovato su vari siti di vendita on-line.
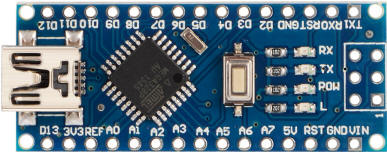
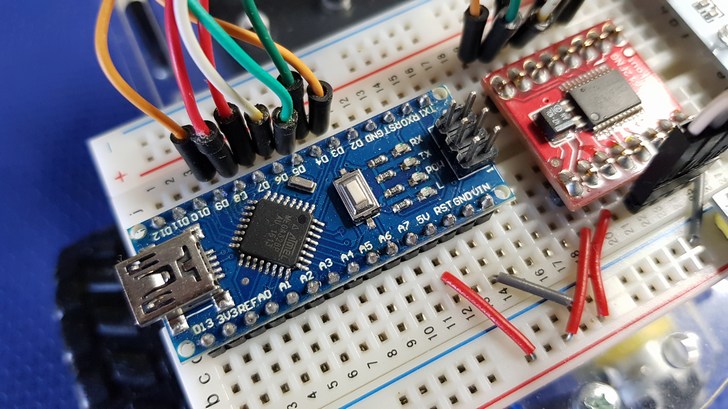
Per la scheda di controllo realizzata su una bread board, si è utilizzato un Arduino Nano, in questo caso un clone
L'alimentazione è fornita da un portabatteria presente nel kit DSD TECH 18650 da Amazon, in cui sono presenti due batterie tipo 18650 agli ioni di litio la cui tensione di lavoro si aggira attorno i 3,6-3,7 volt, in modo da erogare una tensione complessiva di 7,4V.
|
|
|
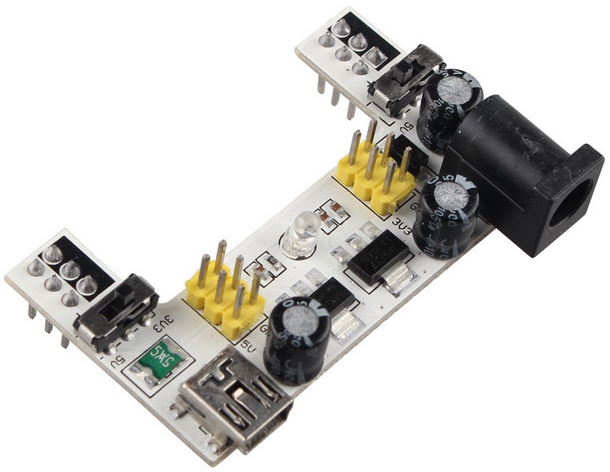
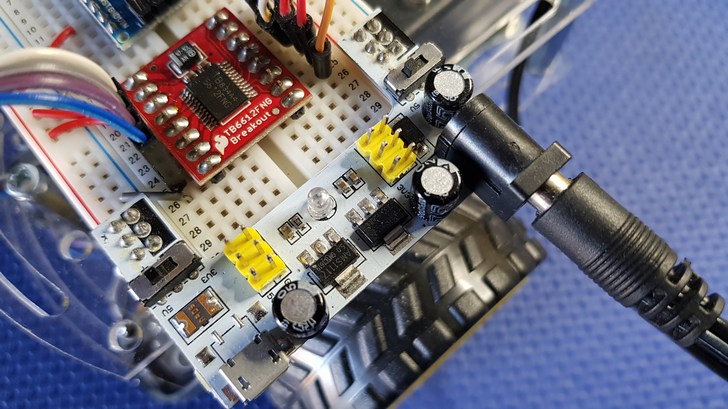
Il connettore in uscita fornisce la tensione ad alimentatore per bread board tipo MB102
|
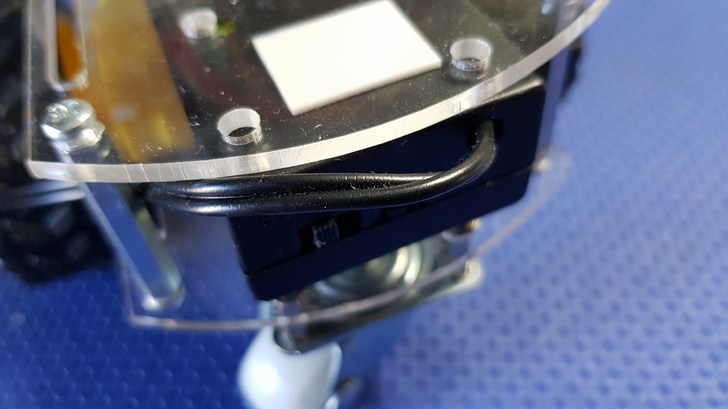
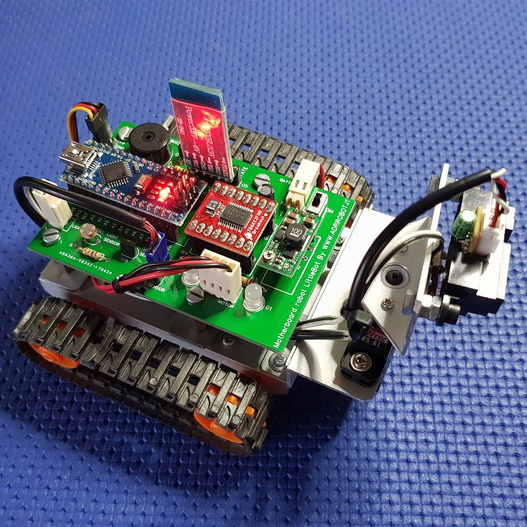
LittleBot
è un piccolo robot dotato di una scheda di controllo su cui è installato un
Arduino
Nano. Il telaio è realizzato in alluminio ed e mosso da due piccoli
motoriduttori realizzati completamente in metallo che muovono una coppia di
cingoli.
Il robot è dotato di alcuni sensori che gli permettono di rilevare alcuni
parametri tra i quali la luminosità e la temperatura. Un sensore frontale
azionato da un servomotore permette al robot di scandagliare lo spazio frontale
e misurare la distanza da eventuali ostacoli e in questo modo di evitarli. I
motor sono azonati da un modulo con TB6612FNG
prodotto dalla SparkFun.
La presenza di un modulo Bluetooth permette di pilotare il robot in modo
wireless tramite la
scheda
Arduino Esplora.
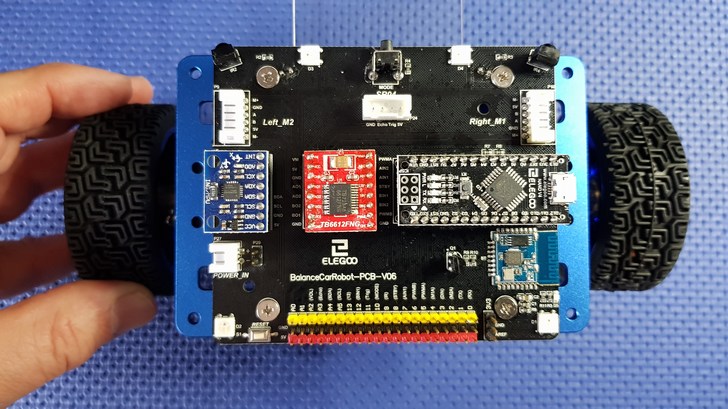
kit proposto da Elegoo denominato Tumbller è un kit per la costruzione di un robot autobilanciate di nuova concezione che ha molteplici affascinanti funzioni come:
Auto inseguimento in avanti
Auto inseguimento all'indietro
Aggiramento degli ostacoli
Funzione Bounce che permette il "parcheggio" del robot e il relativo ritorno in posizione eretta
Effetti luminosi
Il controllo del robot è possibile anche tramite uno smartphone con collegamento bluetooth usando l' APP ELEGOO TOOL BLE.

| Elenco revisioni: | |
|
16/06/2019 | Aggiornata pagina |
|
02/03/2012 | Emissione preliminare |



