Sensori
ultimo aggiornamento 16 giugno 2006
|
Sensori ultimo aggiornamento 16 giugno 2006 |
|
|
|
Pathfinder è dotato di vari tipi di sensori:
Questi sono forniti nel corso dell'opera allegati ai fascicoli. |
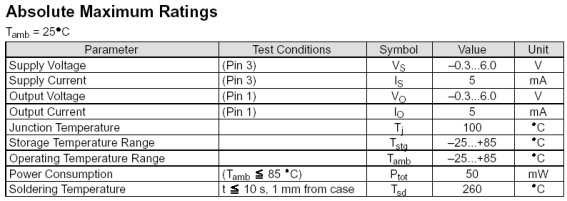
 File PDF LABORATORIO PRATICO |
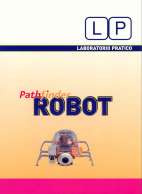
 File PDF COSTRUZIONE DEL PATHFINDER |
| Fascicolo n°44 | Fascicolo n°52 | Fascicolo n°54 | Fascicolo n°55 | Fascicolo n°62 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
1 sensore ottico CNY70 |
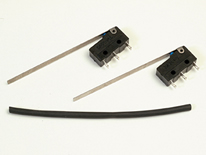
2 Commutatore meccanico |
1 Cavetto 3 pin connettore Femmina |
1 Cavetto 3 pin connettore Femmina |
2 Connettore maschio 2 poli per c.s. |











1 Trasmettitore ultrasonico
1 Tubetto termorestringente
1 Cavetto 2 pin femmina
1 Ricevitore ultrasonico
1 Cavetto 2 pin femmina
1 Sensore ottico a
riflessione tipo cny70
1 Tubetto termorestringente
1 Cavetto 3 pin connettore Femmina
1 sensore di infrarossi TSOP
1 Sensore ottico a
riflessione tipo cny70
1 Tubetto termorestringente
1 Cavetto 3 pin connettore Femmina

|
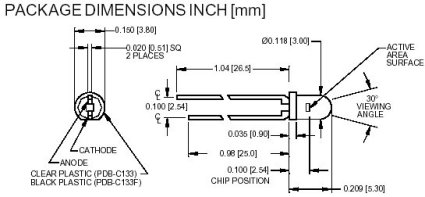
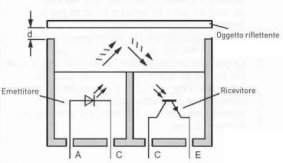
Sensore ottico a raggi infrarossi a
riflessione Tipo CNY70 |
|
|
|
Si tratta di uno dei sensori più utilizzati in
microrobotica, dato il suo basso costo, e le sue svariate applicazioni
pratiche. Abitualmente è utilizzato se si si desidera che il robot mobile segua un percorso segnato da una linea sul pavimento. Funzionamento ed utilizzo All'interno della capsula di questo sensore è montato un diodo LED che emette raggi infrarossi, invisibili all'occhio umano. Il diodo è dotato di due terminali, l'anodo (A) ed il catodo (K). Sulla stessa superficie è ubicato un fototransistor che ha la proprietà di condurre corrente fra l'emettitore (E) e il collettore (C), proporzionale alla quantità di luce che incide sulla base. Dato che sia l'emettitore sia il ricevitore dei raggi sono disposti sulla stessa superficie, è necessario che davanti ad entrambi sia presente una superficie riflettente, per fare in modo che il fototransistor possa ricevere i raggi che genera il led. La superficie riflettente deve essere situata a pochi millimetri da quella su cui sono montati emettitore e ricevitore, per far si che i raggi riflessi abbiano sufficiente intensità. |
|||
 |
 |
||
| Foto dei 4 sensore forniti nel corso dell'opera |
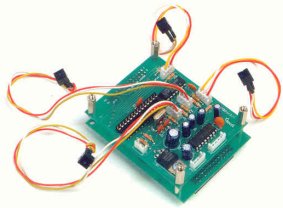
Alla
scheda controllo vengono collegati i sensori |
||
 |
 |
 |
|
|
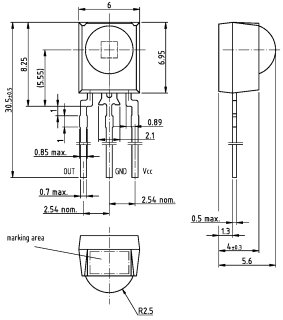
 Dimensioni del sensore |
 |
 |
 |
| Posizionamento di 2 sensori CNY70 sulle ruote laterali | Posizionamento di 1
sensori CNY70 sul motore di movimento eccentrico |
 |
| Posizionamento di 2 sensori CNY70 sulla parte frontale per la funzione seguilinea |
![]()
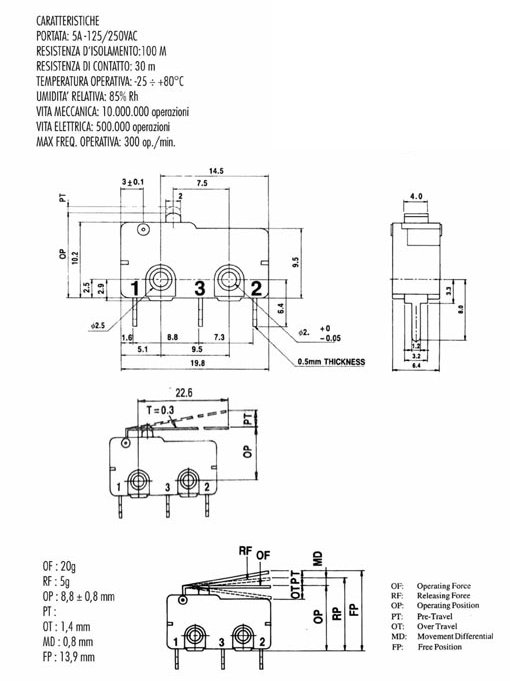
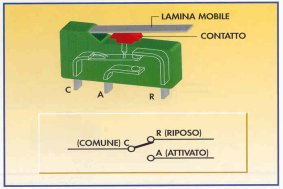
| Sensori meccanici |
 |
 |
 |
|
Esempio schema applicativo del sensore |
 |
Alla
scheda
bus vengono collegati i due sensori meccanici, il deviatore a levetta permette di scegliere tra l'utilizzo dei sensori meccanici e dei sensori sonar |
|
Si tratta di un dispositivo di struttura
meccanica, con funzionamento semplice ed economico, molto apprezzato e
utilizzato in microrobotica, perchè permette di rilevare quando si
produce un contatto fra la superficie del robot mobile e qualunque
ostacolo. I sue contatti sono capaci di sopportare una tensione di 230 V alternati e 5A di corrente. Esso è dotate di 3 terminali: un contatto comune (C) permanentemente collegato al contatto di riposo (R), quando si chiude il contatto tramite la leva si mette in contatto il terminale (C) con il terminale (A) e si scollega il terminale (R). |
|
|
|
|
|
|
| Posizionamento dei 2 sensori meccanici sulla parte frontale del robot |
![]()
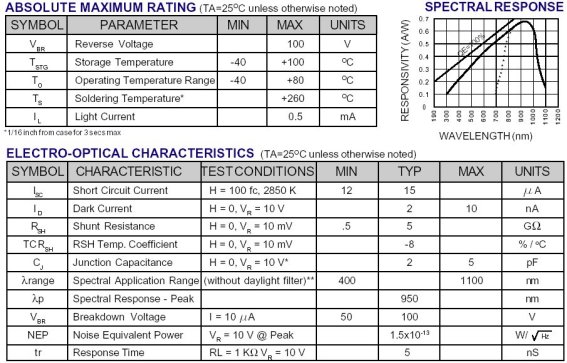
| Fotodiodo |
|
Lo scopo dei
fotodiodi è di rivelare la radiazione luminosa (visibile o
infrarossa) che colpisce il corpo del diodo stesso. La struttura interna di un fotodiodo è molto simile a quella dei diodi PIN: la zona intrinseca è progettata per reagire alla luce generando una coppia di portatori (un elettrone e una lacuna) che contribuiscono al passaggio di corrente attraverso il diodo. Si usano in polarizzazione inversa: in questa condizione, la corrente che attraversa il diodo è dovuta (quasi) esclusivamente alla luce incidente, ed è proporzionale all'intensità luminosa |
|
Esempio schema applicativo del sensore |
|
|
 |
 |
 |
||
 |
In alto a sinistra è visibile il fotodiodo |
![]()
 |
 |
| Alla
scheda sensori vengono collegati i sensori sonar mentre sulla scheda è presente un sensore di luce |
Le due capsule |
| PRINCIPIO DI
FUNZIONAMENTO DEI SENSORI AD ULTRASUONI I sensori ad ultrasuoni sono dispositivi che convertono l’energia elettrica in energia acustica (e viceversa) ad una frequenza superiore al limite di udibilità umano (20 KHz). Esistono sensori che funzionano a frequenze di 25KHz, 40KHz, 120KHz e 200KHz e molti altri valori, con differenti caratteristiche e prestazioni. A seconda del principio di funzionamento si possono classificare i sensori in due categorie:- Elettrostatici- Piezoelettrici
|
|
|
| Posizionamento delle 2 capsule (ricevente ed emittente) sulla parte frontale del robot |
![]()
|
|
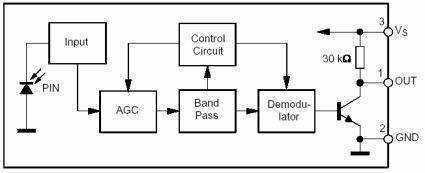
Sensore
infrarossi Tipo TSOP18XX |
|
 |
| Sulla scheda audio è presente oltre al sensore ad infrarossi un un microfono |
|
Esempio schema applicativo del sensore utilizzato nella scheda audio |
|
Esempio schema applicativo del sensore |
|
|
 |
 |
|
|
|
|
![]()
| Elenco revisioni: | |
| 16/06/2006 | Aggiornato pagina inserimento file PDF Costruzione e Laboratorio |
| 16/12/2005 | Emissione preliminare |