![]()


ultimo aggiornamento 11 ottobre 2015
|
ultimo aggiornamento 11 ottobre 2015 |
|
|
|
Per creare e modificare i programmi per il Robot Robi è possibile utilizzare un programma denominato Robiscope (ora nella versione 1.7.0 del 21 giugno 2015) realizzato da ROBOMIC, il programma presenta un'interfaccia il lingua italiana (la traduzione è stata curata dal sito www.adrirobot.it).

Il programma permette inoltre di comandare i singoli servo motori del robot anche senza la scheda di controllo definitiva del robot, permette di leggere e variare i parametri interni, per il suo utilizzo è necessaria la costruzione di un'interfaccia, per le istruzioni di montaggio vedere l'apposita pagina.
E' possibile si salvare singole impostazione dei servo e di rieseguire automaticamente la sequenza. I dati possono essere salvati sulla memoria SD da inserire nella scheda del Robot.
Esempio realizzazione scheda interfaccia per i servo motori
 |
 |
Procedura d'installazione e uso del programma
Il primo passo per
l'utilizzo dell'interfaccia per i servo di Robi è l'installazione
del programma seguendo la seguente procedura:
-Scaricare il pacchetto robiscope.zip dal
sito
di ROBOMIC, è disponibile sia la versione per Windows che per MAC
- Scompattare il pacchetto, sarà creata una cartella denominata Robiscope, al
cui interno saranno salvati i files e sarà disponibile il programma Robiscope.exe, non è
necessario alcuna installazione o programma aggiuntivo

- Collegare se
necessario la
scheda
d'interfaccia al computer.
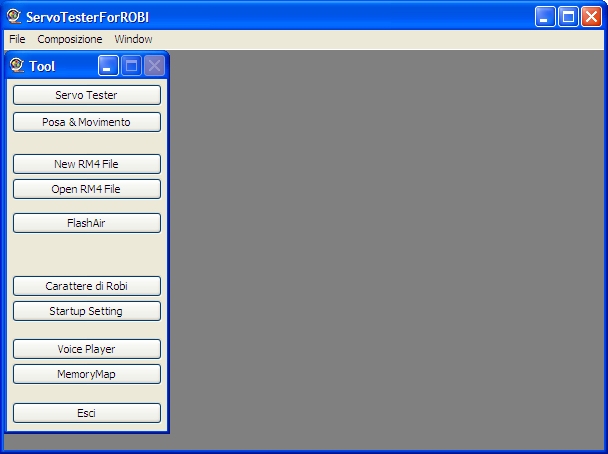
- Lanciare il programma Robiscope.exe, si aprirà la
finestra
Main con il menu Tool in cui sono presenti i seguenti comandi:
Servo Tester,
Posa & Movimento,
New RM4 File, Open RM4 file,
FlashAir, Carattere di Robi,
Startup Setting,
Voice
Player, MemoryMap, Esci
 |
 |
Premendo il tasto
![]() si aprirà una finestra che rappresenta il
Servo Tester V2 del
tutto simile a quello fornito con i fascicoli di Robi. Se si utilizza
l'apposita
interfaccia che è possibile autocostruire si potrà verificare e
programmare gli ID e controllare il funzionamento dei servomotori
si aprirà una finestra che rappresenta il
Servo Tester V2 del
tutto simile a quello fornito con i fascicoli di Robi. Se si utilizza
l'apposita
interfaccia che è possibile autocostruire si potrà verificare e
programmare gli ID e controllare il funzionamento dei servomotori
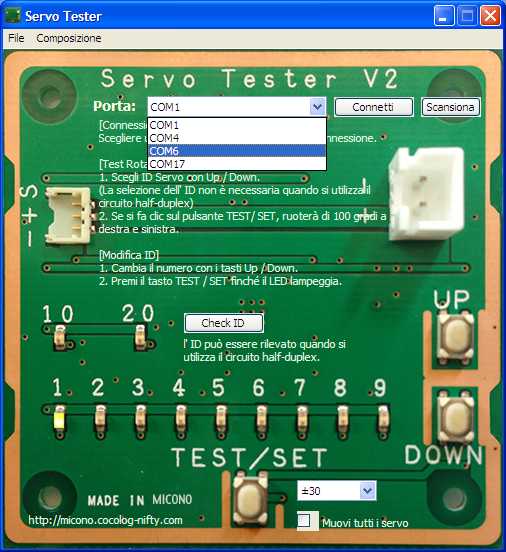
- Nel menu a discesa Porta, selezionare la
porta a cui è connessa la scheda e premere Connetti, ora premendo il
tasto Check ID, si potrà verificare il numero del servo connesso alla
scheda, in corrispondenza del numero si vedrà l'accensione del led
corrispondente (nel caso della figura il n° 1).
- Si potrà ora scegliere nel menù a discesa posto al lato del tasto TEST/SET
l'angolo di rotazione che vogliamo testare, di default è selezionato ±30 ma
il suo valore può variare tra i ±150 gradi, premendo ora il tasto TEST/SET,
il servo o i servo collegati effettueranno la rotazione impostata.
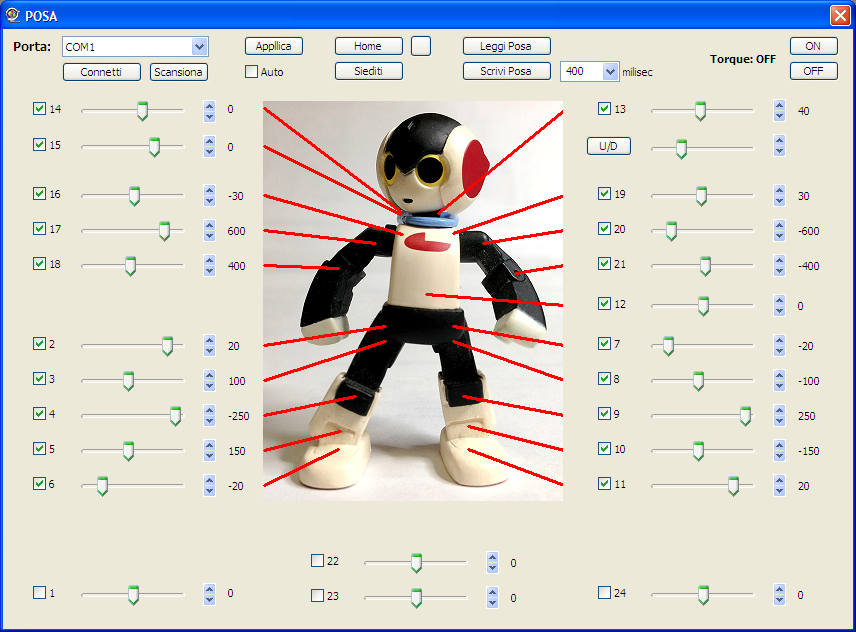
- Dalla finestra Main è possibile richiamare la finestra POSA, che
permette di selezionare i vari servo connessi a cui deve essere assegnato un ID,
nel caso di figura è selezionato solamente il servo con ID 1, muovendo il
relativo slider, con la funzione Auto attivata, il relativo servo si
muoverà all'angolo selezionato, sono possibili spostamenti ±115 gradi.
Se la funzione Auto non è attivata, per muovere il servo occorre premere
il tasto Applica
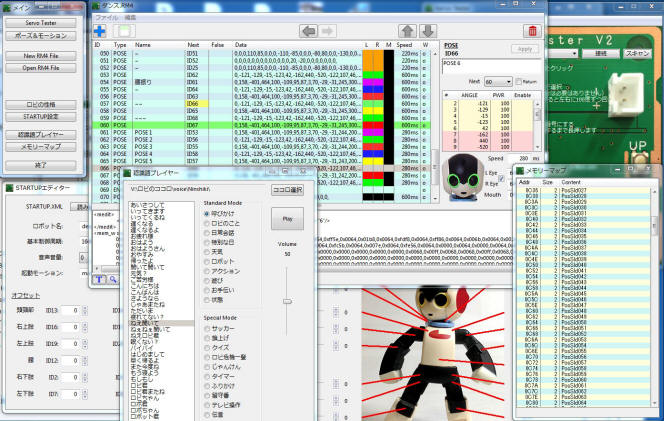
Premendo il tasto
![]() si aprirà tre finestre: POSA, MOVIMENTO e SERVOTESTER con questo è possibile salvare le varie
configurazioni dei servo per poi rieseguirle in un secondo tempo.
Per fare questo occorre premere il tasto Leggi Posa e poi Scrivi posa
nella finestra POSA, oppure il tasto Posa (leggi) della finestra
MOVIMENTO, in entrambi i casi nella finestra MOVIMENTO sarà
aggiunta una linea in qui per ogni servo è indicato il valore di rotazione, se
il sevo non è attivo viene riportato una "x", il valore presente a fine linea è
il valore in millisecondo per l'esecuzione di ogni movimento. Se nella
finestra MOVIMENTO si selezione una linea con il tasto Posa (Applica)
è possibile spostare i relativi servomotori alla posizione riportati sulla linea
stessa.
si aprirà tre finestre: POSA, MOVIMENTO e SERVOTESTER con questo è possibile salvare le varie
configurazioni dei servo per poi rieseguirle in un secondo tempo.
Per fare questo occorre premere il tasto Leggi Posa e poi Scrivi posa
nella finestra POSA, oppure il tasto Posa (leggi) della finestra
MOVIMENTO, in entrambi i casi nella finestra MOVIMENTO sarà
aggiunta una linea in qui per ogni servo è indicato il valore di rotazione, se
il sevo non è attivo viene riportato una "x", il valore presente a fine linea è
il valore in millisecondo per l'esecuzione di ogni movimento. Se nella
finestra MOVIMENTO si selezione una linea con il tasto Posa (Applica)
è possibile spostare i relativi servomotori alla posizione riportati sulla linea
stessa.
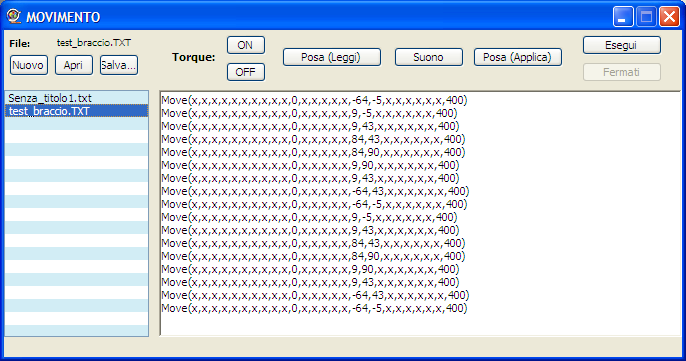
- E' possibile salvare un'insieme di movimenti per eseguirli in un secondo tempo premendo il tasto Salva, e richiamarlo con il tasto Apri.
Premendo il tasto
![]() ,
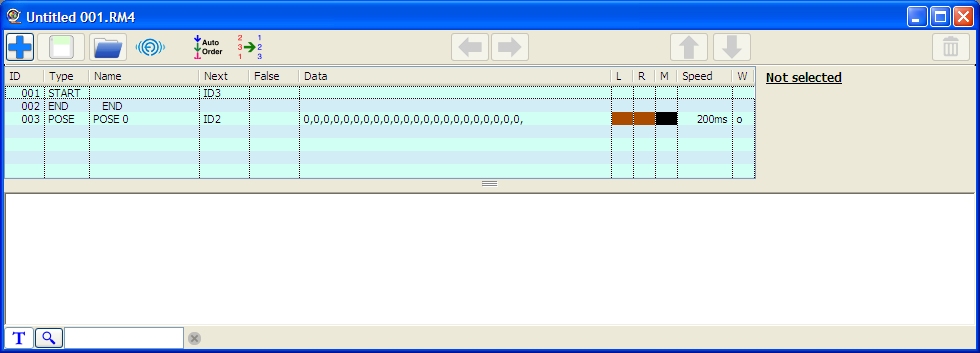
si aprirà una finestra che permette di creare un file RM4
,
si aprirà una finestra che permette di creare un file RM4
Premendo il tasto
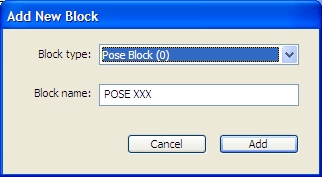
![]() si possono aggiungere nuove blocchi di programma, una volta premuto si aprirà la
seguente finestra
si possono aggiungere nuove blocchi di programma, una volta premuto si aprirà la
seguente finestra
Il tasto di salvataggio del file, nel caso siano
state effettuate delle modifiche passa dal colore verde
![]() al colore Rosso
al colore Rosso
![]()
Il tasto
![]() permette l'apertura della cartella dove salvare il file in fase di modifica.
permette l'apertura della cartella dove salvare il file in fase di modifica.
Premendo i tasti
![]() o
o
![]() si aprirà il programma di navigazione internet con
il collegamento al link (http // FlashAir).
si aprirà il programma di navigazione internet con
il collegamento al link (http // FlashAir).
Premendo il tasto
![]() si può riorganizzare in automatico l'ordine dei blocchi
si può riorganizzare in automatico l'ordine dei blocchi
Premendo il tasto
![]() si rinumerano blocchi riorganizzati nell'ordine
si rinumerano blocchi riorganizzati nell'ordine
I tasti
![]()
![]() permettono di muoversi tra le istruzioni
permettono di muoversi tra le istruzioni
I tasti
![]()
![]() promettono di portarsi velocemente all'inizio o alla fine del file.
promettono di portarsi velocemente all'inizio o alla fine del file.
Premendo il tasto
![]() si può cancellare un blocco.
si può cancellare un blocco.
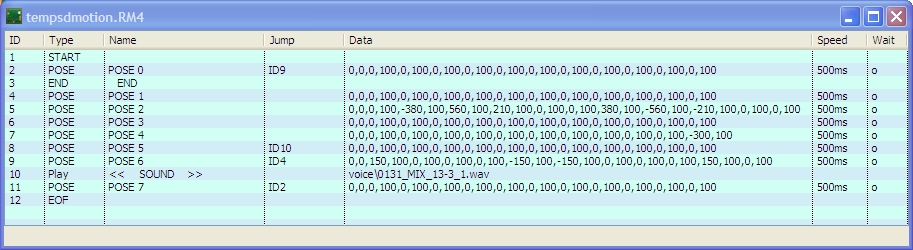
Premendo il tasto
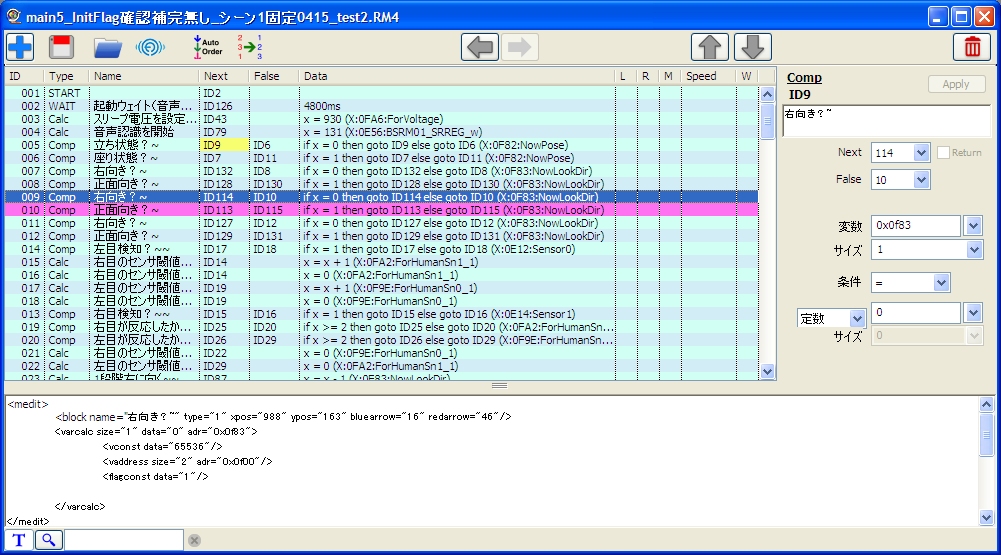
![]() si potrà aprire un qualunque file RM4 già presente e salvato nella memoria SD di
Robi. E' possibile leggere i vari comandi modificandoli e salvando poi il
risultato finale.
si potrà aprire un qualunque file RM4 già presente e salvato nella memoria SD di
Robi. E' possibile leggere i vari comandi modificandoli e salvando poi il
risultato finale.
Evidenziando una linea, nella finestra sottostante è possibile vedere le righe
di comando, mentre sul lato destro sono evidenziati alti dati.
Premendo il tasto
![]() ,
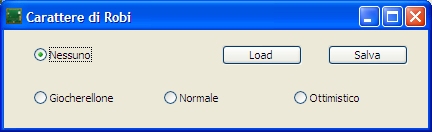
si aprirà una finestra che permette di variare il carattere con cui Robi dialoga
con l'interlocutore, e che viene stabilito al momento del risveglio del Robot.
,
si aprirà una finestra che permette di variare il carattere con cui Robi dialoga
con l'interlocutore, e che viene stabilito al momento del risveglio del Robot.
E' possibile salvare e caricare queste impostazioni
in un file con estensione Log.
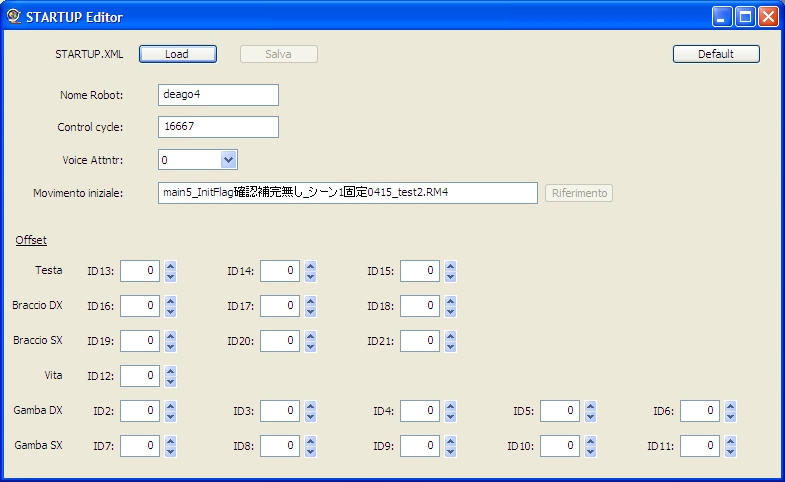
Premendo il tasto
![]() ,
si aprirà una finestra che permette di modificare le impostazioni di
configurazione dei servo del robot, le informazioni possono essere salvate e
caricate tramite file con estensione XML. Premendo il tasto
,
si aprirà una finestra che permette di modificare le impostazioni di
configurazione dei servo del robot, le informazioni possono essere salvate e
caricate tramite file con estensione XML. Premendo il tasto
![]() presente nella finestra saranno caricati le impostazioni di base.
presente nella finestra saranno caricati le impostazioni di base.
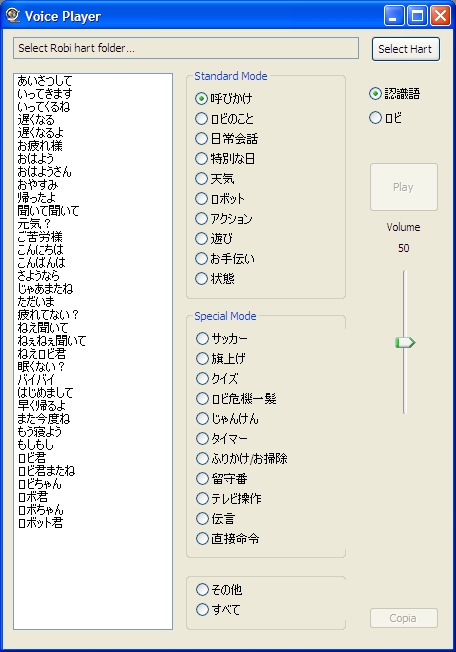
Premendo il tasto
![]() si aprirà una finestra che permette di esaminare e sentire le frasi contenute
nella memoria SD del Robot
si aprirà una finestra che permette di esaminare e sentire le frasi contenute
nella memoria SD del Robot
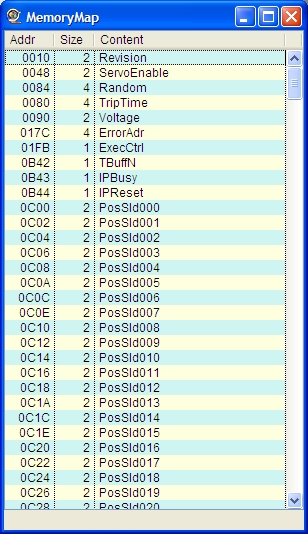
Premendo il tasto
![]() si aprirà una finestra per esaminare il contenuto della memoria del Robot
si aprirà una finestra per esaminare il contenuto della memoria del Robot
Il tasto
![]() presente nella
finestra Main permette l'uscita dal programma
presente nella
finestra Main permette l'uscita dal programma
Disclaimer: Chi utilizza questo questo software, lo fa a proprio rischio. Non si assume nessuna responsabilità.
| Elenco revisioni | |
|
11/10/2015 |
Aggiornato le informazioni inerenti alla versione 1.7.0 (Roboscope) del programma |
|
11/02/2015 |
Aggiornato le informazioni inerenti alla versione 1.6.7 del programma del 17-11-2014 |
|
31/08/2014 |
Aggiornato le informazioni inerenti alla versione 1.5.1 del programma del 31-8-2014 |
|
11/06/2014 |
Inserito schema e foto del prototipo della scheda di controllo, istruzioni d'uso del programma |
|
02/02/2014 |
Emissione preliminare |

