![]()


ultimo aggiornamento 4 agosto 2018
![]()
![]()
![]()
![]()
![]()
![]()
|
|
ultimo aggiornamento 4 agosto 2018 |
|
|
|
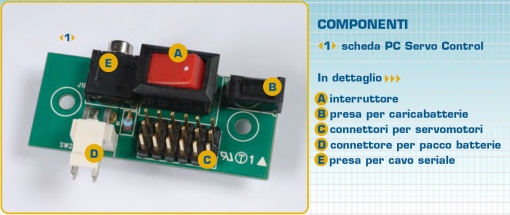
Con il Fascicolo 17 viene
allegata la
scheda
elettronica PC Servo Control, un nuovo elemento fondamentale che
permette di svolgere alcune importanti operazioni.
In primo luogo serve come interfaccia per collegare fino a sei
servomotori digitali
al PC, quindi programmarli per mezzo del
software RoboScript.
Questa speciale scheda sostituisce temporaneamente la
motherboard
MR-C3024 e dovrà essere utilizzata per realizzare le configurazioni
robotiche RoboArm (sia nella versione a tre
servomotori sia in quella a quattro) e
RoboSnake.
Per utilizzare correttamente il
software RoboScript con
la scheda PC Servo Control bisogna programmare gli ID numerici dei
servomotori tramite l’apposito programma
HMI Servo Programmer fornito con il
secondo CD-Rom.
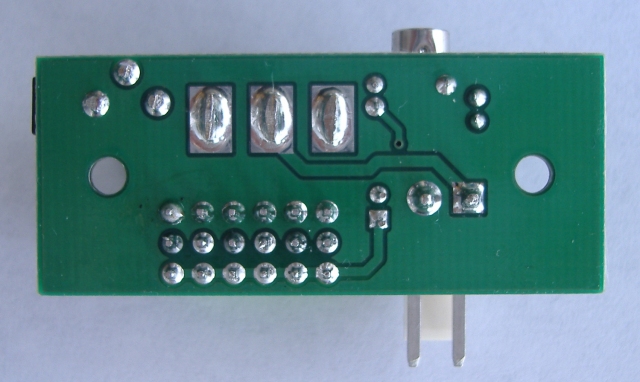
La scheda PC Servo Control serve anche per ricaricare il
pacco batterie.
Per fare questo si dovrà prima collegare il
caricabatteria (allegato
al fascicolo n°16) a una presa elettrica di rete.
L’interruttore della scheda PC Servo Control, inoltre, dovrà essere
posto su OFF affinché il processo di ricarica possa avvenire
correttamente.


Si collegherà quindi la batteria al connettore SW2 e il caricabatteria al connettore SW1.
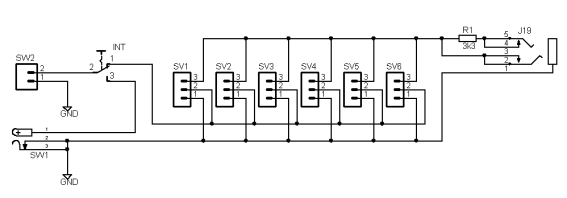
Schema elettrico (non ufficiale)

|
|---|
Cavo di collegamento tra PC e scheda di controllo
Il cavo di collegamento, allegato al fascicolo n°19 ha una lunghezza di 2 metri e presenta dal lato PC un connettore RS232 a 9 pin femmina e dal lato scheda/robot un connettore stereo dal diametro 2.5 mm.
 Connettore lato PC |
 Connettore lato Scheda |
| Elenco revisioni | |
| 04/08/2018 | Aggiornato pagina con caratteristiche cavo di collegamento. |
| 03/09/2008 | Inserito foto e schema cavo di collegamento |
| 17/03/2008 | Emissione preliminare |