![]()

ultimo aggiornamento 19 febbraio 2009
![]()
![]()
![]()
![]()
![]()
![]()
|
|
ultimo aggiornamento 19 febbraio 2009 |
|
|
|
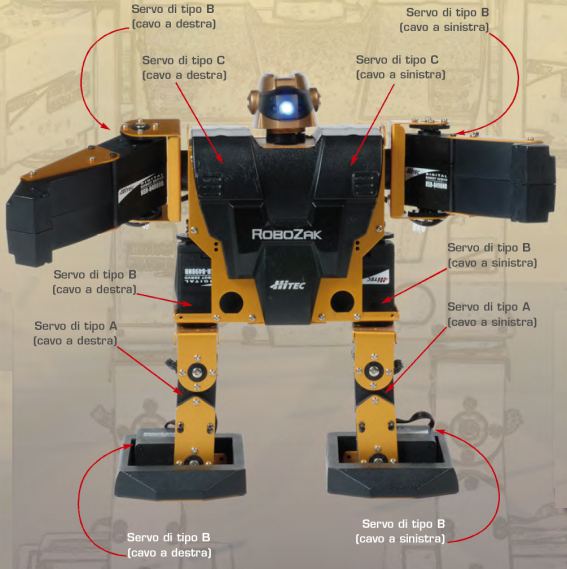
Inizia con il fascicolo
n° 57 per concludersi con il numero n°68 la costruzione del pinguino che è RoboZak da piccolo: in grado di
camminare.
Possiede 10 gradi di libertà e impiega
10 servomotori che
costituiscono le gambe e le braccia.
Al comando troviamo la solita
scheda
MR-C2024.


In particolare le istruzioni di montaggio sono riportate sui fascicoli
Programmazione
N° 63 Le prime mosse del pinguino robotico - Robotpenguin_1.bas
N° 66 Rotazione in senso orario e antiorario - Rotazione.bas
N° 67 Testiamo i sensori con Robopenguin - Penguin_Distance.bas, Penguin_Sound.bas
FOTO DEL MONTAGGIO

 |
 |
 |
 |
 |
 |
 |
| Elenco revisioni | |
| 17/03/2009 | Inserito immagini copertine fascicoli da 64 a 67, foto montaggio |
| 16/02/2009 | Inserito immagini copertine fascicoli da 57 a 63 |
| 12/01/2009 | Inserito fascicoli 58-62 |
| 24/11/2008 | Aggiornato pagina |
| 04/08/2007 | Emissione preliminare |

