![]()


ultimo aggiornamento 6 maggio 2008
![]()
![]()
![]()
![]()
![]()
![]()
|
|
ultimo aggiornamento 6 maggio 2008 |
|
|
|
|
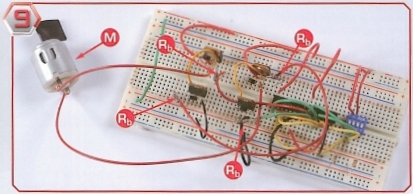
Sul
fascicolo n° 23 dell'opera è descritto nella
sezione WORKSHOP la parte teorica per la costruzione di un ponte H.
Montaggio proposto sul fascicolo n° 25 |
|

|
|
 |
 |
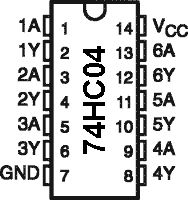
| SN74HC04 HEX SCHMITT-TRIGGER INVERTERS | ||

 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| 74HC08 Quadrupla porte AND | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
|
Esempio utilizzo: Ponte H Robozak |
||
| BDX53 - BDX54 Transistor darlington | ||
|
|
 |
| Piedinatura | Datasheet | Foto del transistor |
| Diodo 1N4007 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
| Elenco revisioni | |
| 06/05/2008 | Emissione preliminare |