![]()
![]()
Ultimo aggiornamento della pagina 19 gennaio 2007
a cura di Nicola Sellitto (Napoli) e Adriano Gandolfo (Torino)
|
|
Ultimo aggiornamento della pagina 19 gennaio 2007 a cura di Nicola Sellitto (Napoli) e Adriano Gandolfo (Torino) |
|
|
|
In questa pagina potete trovare le informazioni inerenti il telaio e le fasi di montaggio del robot TOBOR. Il materiale e di derivazione del robot Cybot. Io ho utilizzato i componenti dei primi tre fascicoli che avevo preso doppi.
 |
 |
 |
 |
 |
 |
| Fascicolo n°1 | Fascicolo n°2 | Fascicolo n°3 |
|
|
|

Dettaglio gruppo motoriduttori robot

Foto del foto per fissaggio presa RS232

Presa RS232 montata in posizione

Foto telaio con distanziali per fissaggio scheda di controllo
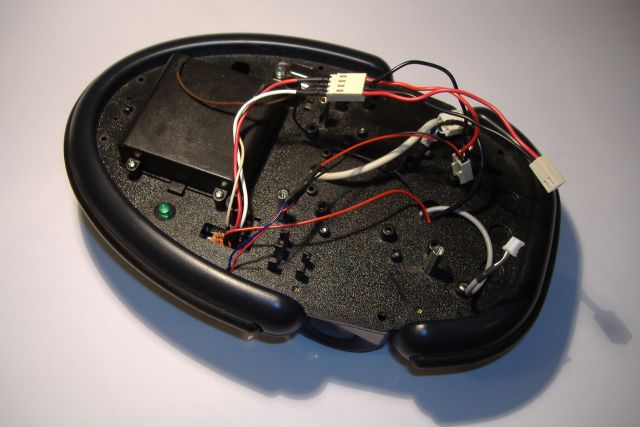
Foto con visibile tutti i cavi dal portabatterie per i motori e dalla batteria 9V per alimentazione parte elettronica
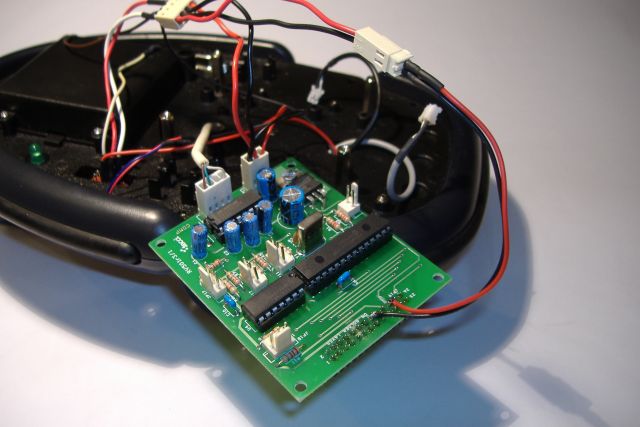
Collegamento della scheda di controllo
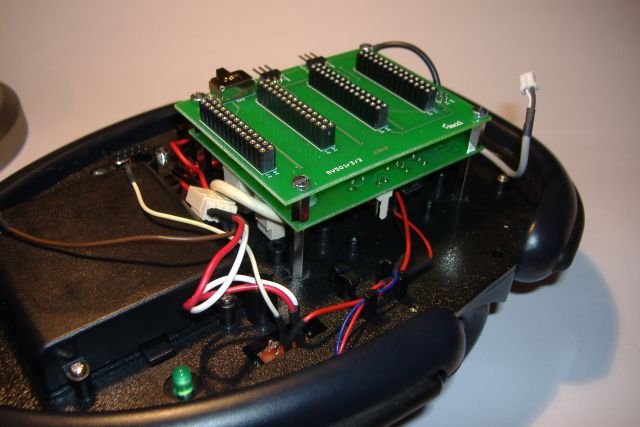
Fissaggio della scheda bus
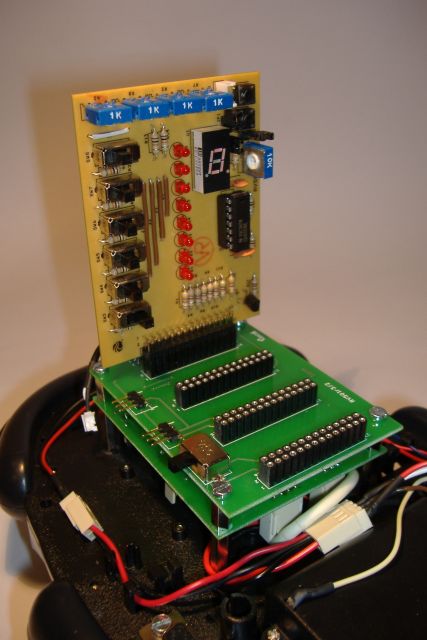
Nella foto è visibile la scheda di
prova del robot
Pathfinder usata per verificare il funzionamento della scheda controllo, per
il caricamento del programma è stato utilizzato il bootlader.
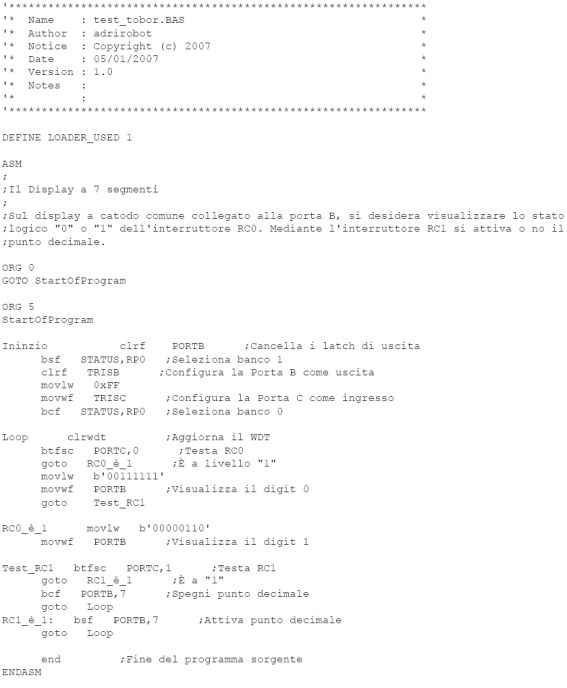
Il programma è molto semplice e mostra sul display 8 segmenti il valore
"0" o "1" a seconda della posizione dell'interruttore SW3, mentre SW4 accende e
spegne il punto.
|
Programma BAS |
Programma HEX |
| Elenco revisioni | |
| 19/01/2007 | Aggiornato pagina |
| 20/12/2006 | Aggiunto foto e aggiornato pagina |
| 02/07/2004 | Emissione preliminare |

