Montaggio dei distanziali esagonali sulla
piastra di base |

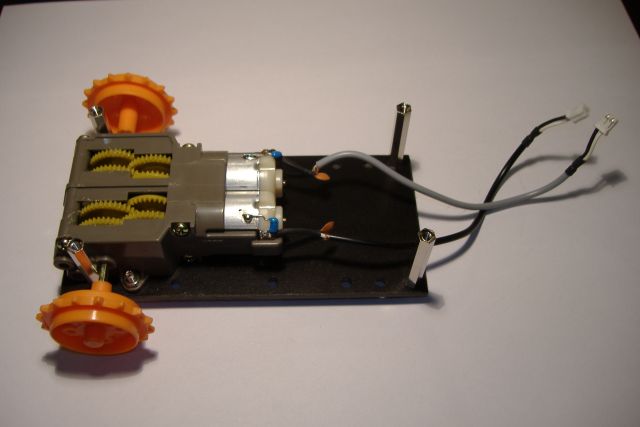
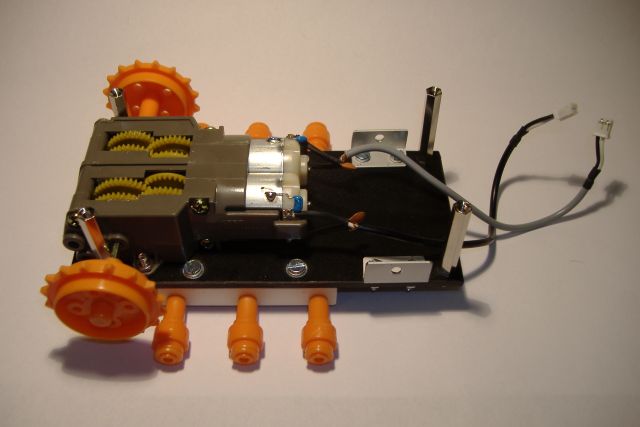
Montaggio del motore sulla
piastra di base |

Montaggio del profilato di
supporto delle ruote guide dei cingoli |

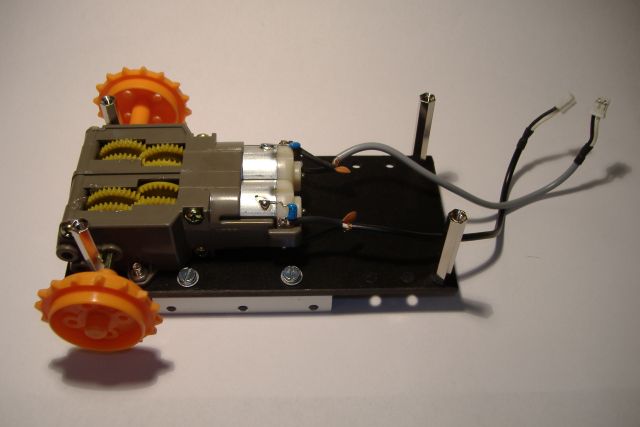
Montaggio delle ruote guide dei cingoli |

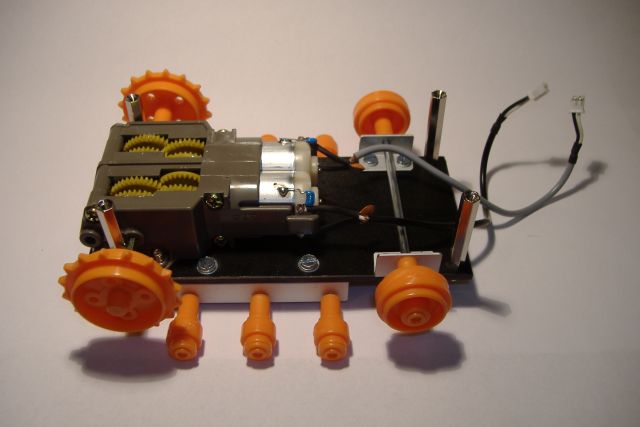
Montaggio del profilato di supporto della rota tendicigoli |

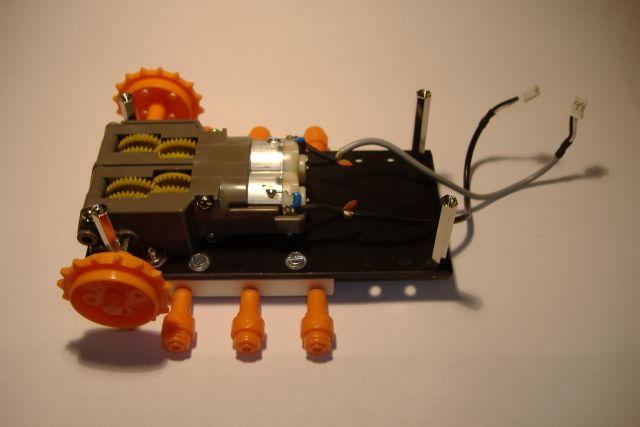
Montaggio dell'asse con le ruote tendicigoli |

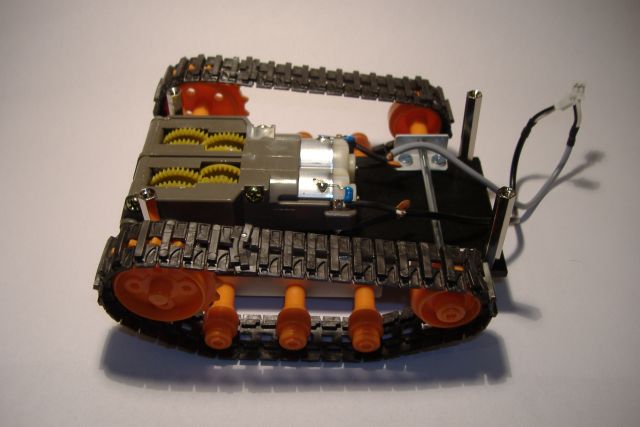
Montaggio dei cingoli sulle ruote, occorre verificare la loro
tensione |

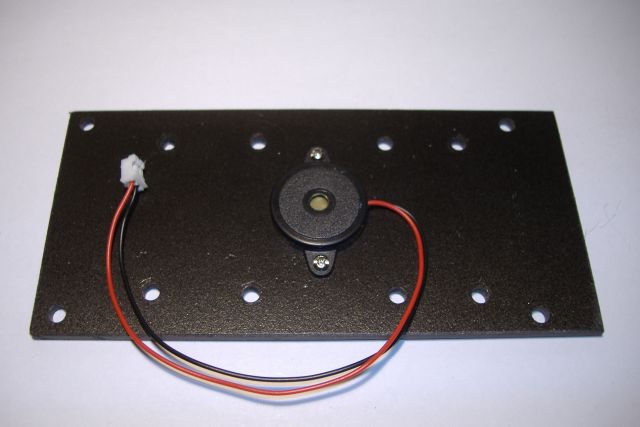
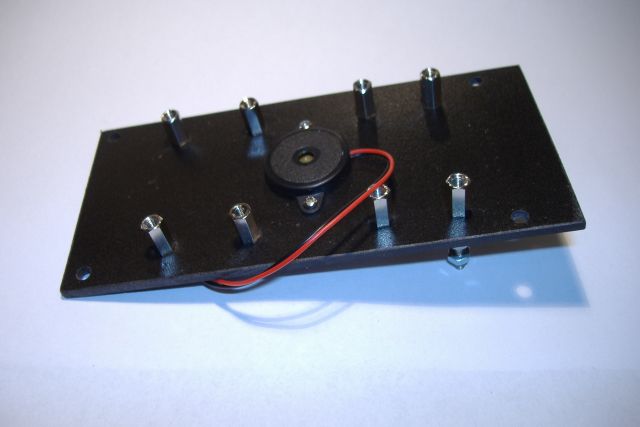
Fissaggio del buzzer alla piastra di supporto schede |

Montaggio dei distanziali di supporto delle schede |

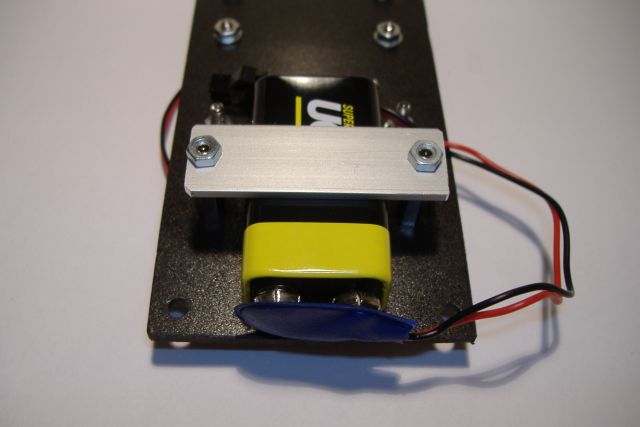
Fissaggio della batteria da 9V per l'alimentazione della parte
elettronica del robot |

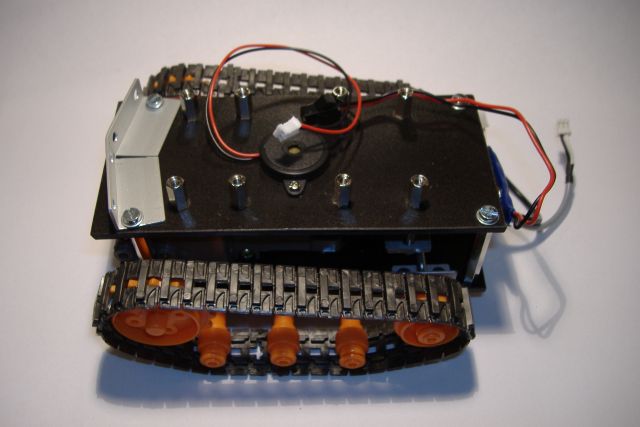
Fissaggio della piastra di supporto schede in posizione |

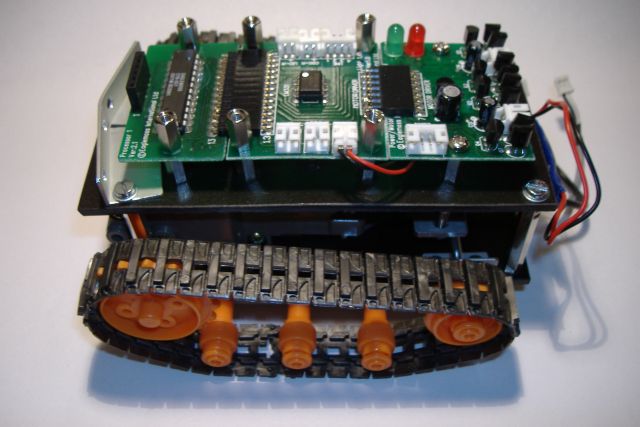
Fissaggio della
Scheda
potenza
per l'azionamento dei motori |

Fissaggio della Scheda
Scheda light I/O |

Fissaggio della Scheda
Scheda processore
UC1 |

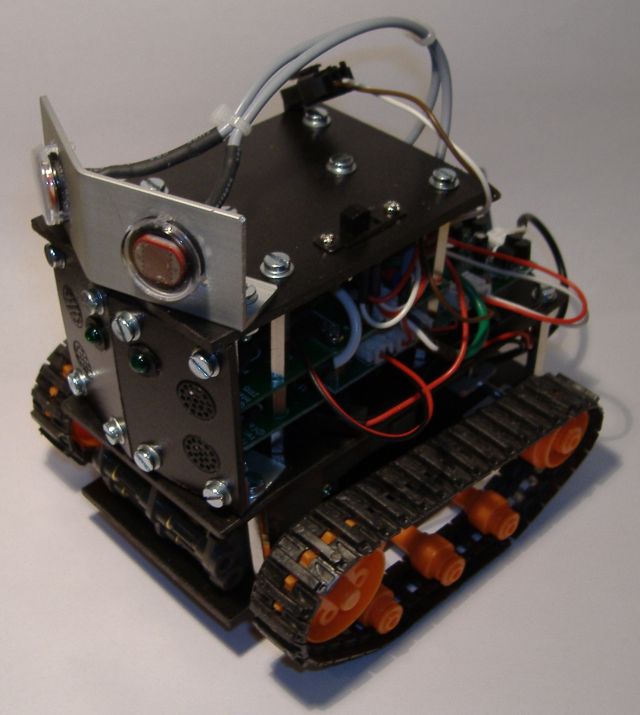
Terminata la fase di montaggio del primo fase del robot |

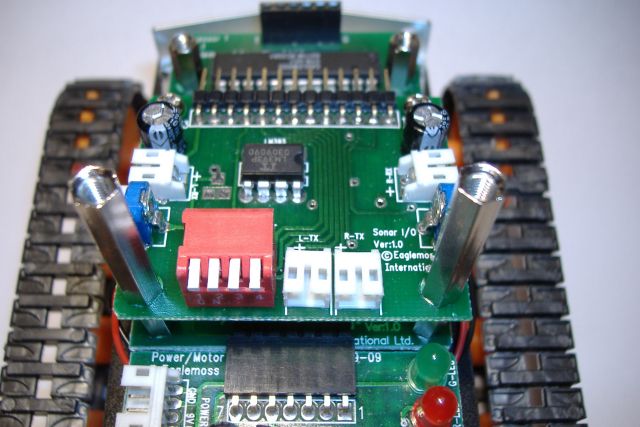
Fissaggio della Scheda
Scheda sonar I/O |

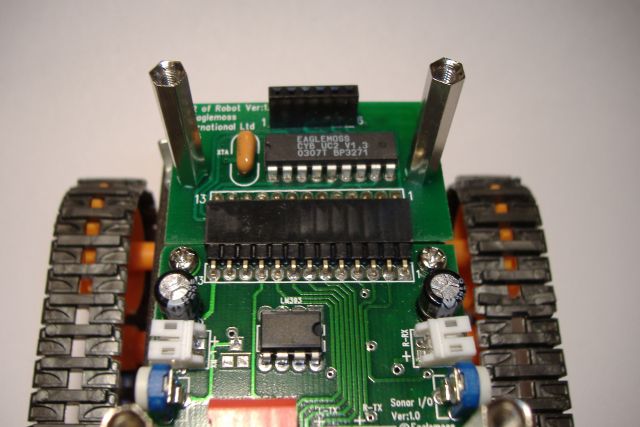
Fissaggio della Scheda
Scheda processore
UC2 |

Terminata la fase di montaggio del primo fase del robot |

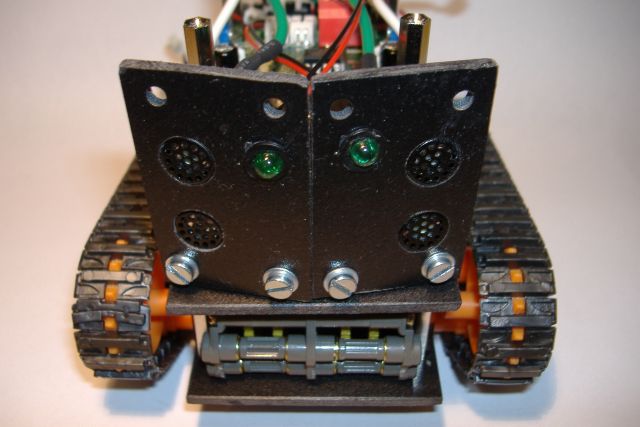
Fissaggio inferiore dei frame con le capsule dei sonar |

Fissaggio superiore dei frame con le capsule dei sonar |

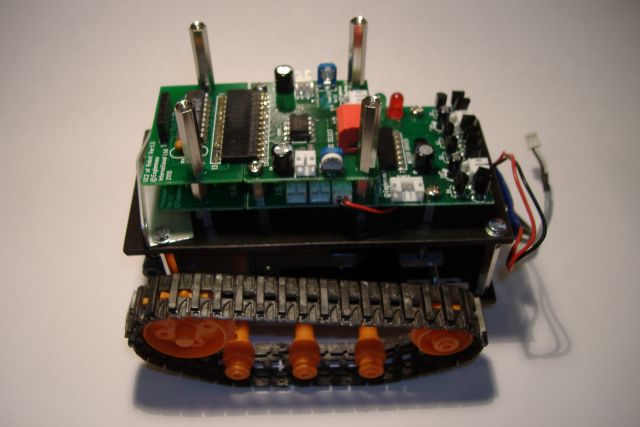
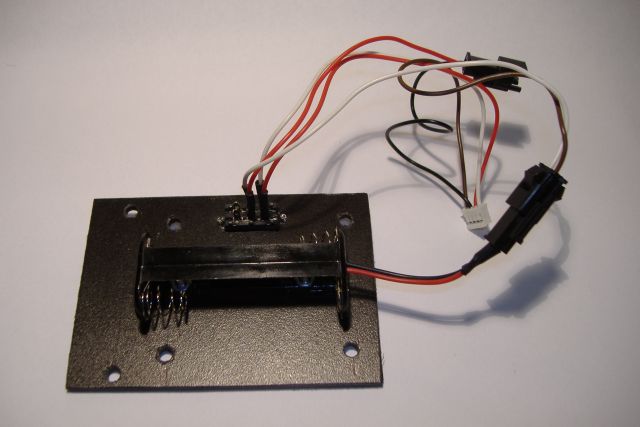
Fissaggio del porta batterie (2 pile da 1,2V ricaricabili) e
dell'interruttore |

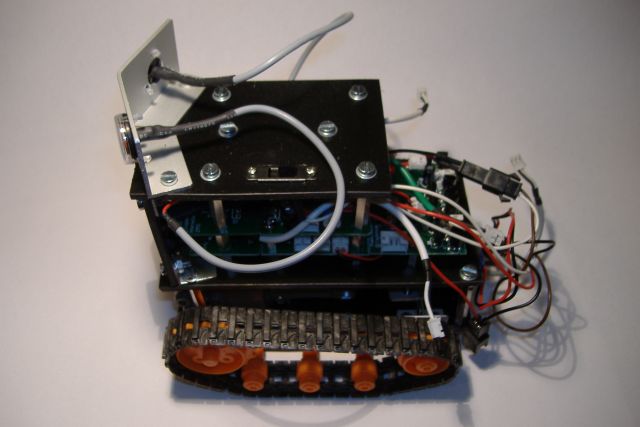
Fissaggio della staffa con le fotocellule e sistemazione finale
dei cavi |
|
|