![]()
ultimo aggiornamento 25/08/2008
|
|
ultimo aggiornamento 25/08/2008 |
|
|
|
| Sistema di
navigazione. Al termine di questa fase di costruzione si potrà
far muovere I-Droid01 in tutte le direzioni e a velocità variabile. Viene montata la scheda di del modulo base che controlla i due motori delle ruote e quello per il movimento del bacino. Grazie a questo motore collocato all'altezza del bacino il robot è in grado di alzarsi e abbassarsi di qualche centimetro, incrementando in tal modo le proprie capacità motorie ed espressive. vengono inoltre montati i sensori, emettitori e ricevitori sonar all'interno del marsupio. Per il completamento della fase sono necessari i fascicoli dal n° 54 al n° 63 |

 |
 |
 |
 Ruota montata in posizione |
 Le due ruote motrici con luci di posizione accese |
![]()
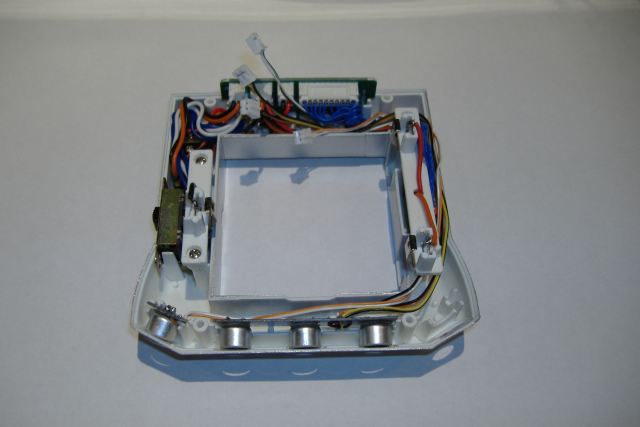
| Montaggio sistema sonar | |||||||||
|
![]()
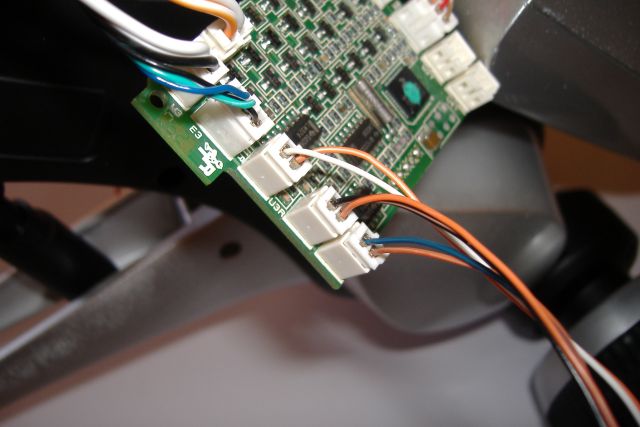
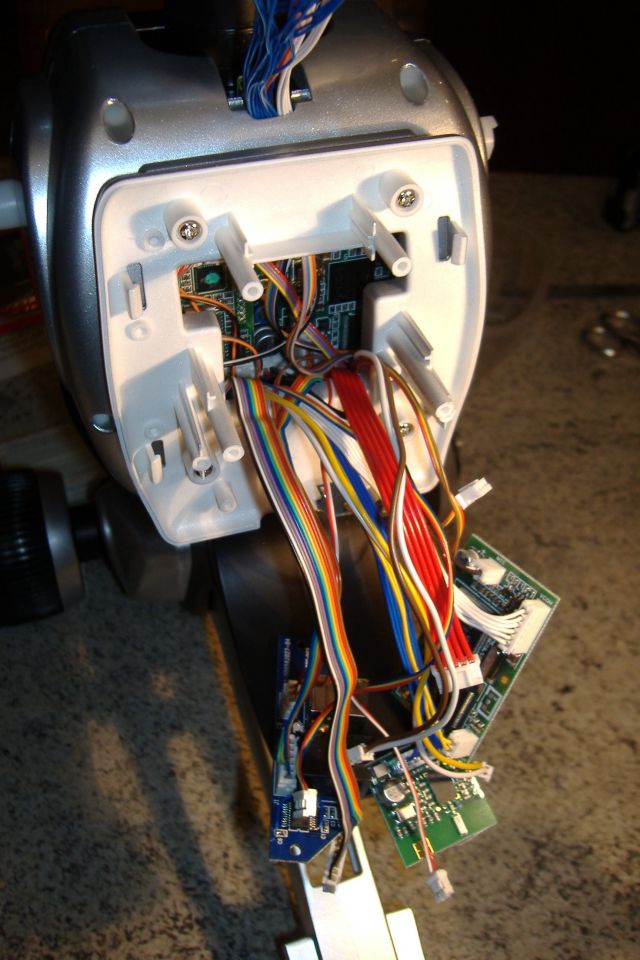
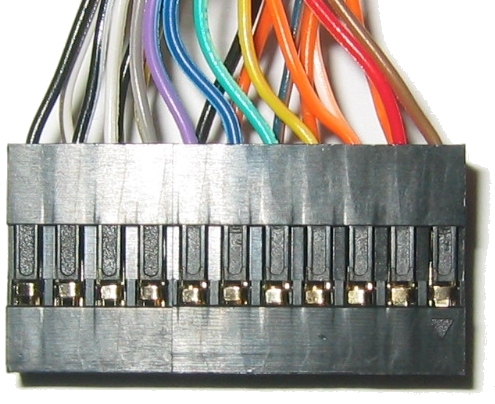
| Montaggio modulo BASE | |||||||||||||||
|
![]()
|
![]()
| Elenco revisioni | |
| 25/08/2008 | Modificato layout pagina |
| 02/02/2007 | Inserito fasi di montaggio modulo base. |
| 19/01/2007 | Inserito fascicoli 62-63, inserito fasi di montaggio del sistema sonar |
| 07/12/2006 | Emissione preliminare |
![]()