![]()

ultimo aggiornamento 7 gennaio 2011
![]()
![]()
![]()
![]()
![]()
![]()
|
|
ultimo aggiornamento 7 gennaio 2011 |
|
|
|
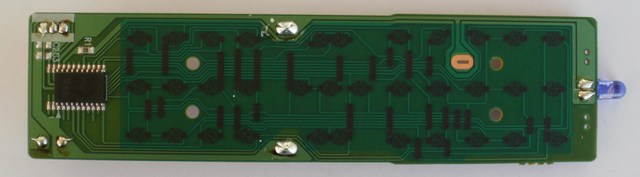
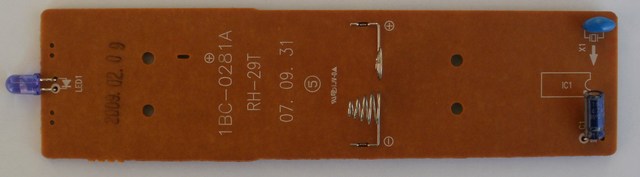
Allegato ai numeri 75 e 80 vengono forniti i due componenti che sono necessari per telecomandare il robot. Questi componenti sono:
Il ricevitore IR per telecomando (allegato al fascicolo n° 75)
Il telecomando (allegato al fascicolo n°80)
E' possibile comandare il robot anche tramite un telecomando virtuale
 |
 |


|
|
|||
|
|
|
|
|
Per esempi di utilizzo vedere i fascicoli n° 53, 68, 79, 81, 82, 88
 |
 |
|
 |
 |
 |
Ogni telecomando può essere impostato per inviare i comandi su quattro diversi canali, per variare questo canale occorre seguire la seguente procedura
 |
Dopo aver inserito le batterie all'interno del telecomando accendiamo RoboZak e avviciniamo il telecomando al ricevitore a infrarossi montato sulla testa del robot, come mostrato nell’immagine. |
 |
Premiamo contemporaneamente il pulsante P1 e un tasto tra 1 e 4
(ossia l’ID scelto) per circa due secondi. Poiché nel programma Template.bas viene assunto che si utilizzi l’ID numerico ‘1’, premiamo il pulsante 1. Dopo questa procedura il settaggio dell’ID è completato e possiamo usare correttamente il telecomando Remocon. |
A =
REMOCON(1)
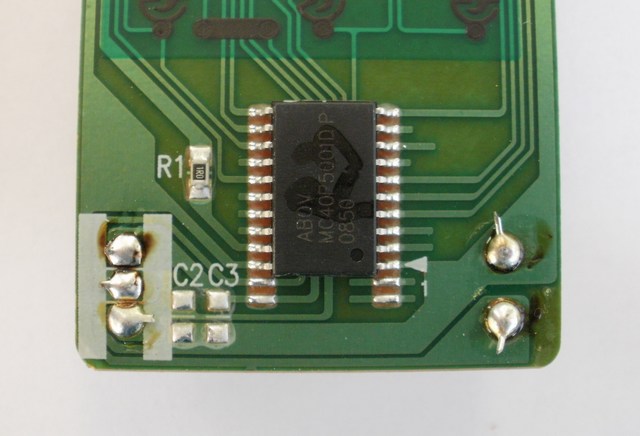
Questa istruzione legge il valore inviato dal telecomando Remocon al ricevitore
a infrarossi (che va collegato alla porta AD7 della scheda di controllo).
Il parametro A è una variabile in cui viene memorizzato il valore numerico
associato al pulsante premuto (da ‘1’ a ‘32’). Se non viene premuto nessun
pulsante nella variabile viene memorizzato il valore ‘0’. La
scheda MR-C3024
è in grado di gestire quattro diversi canali per comunicare con il telecomando.
Questo significa che è possibile comandare quattro diversi RoboZak in
contemporanea, con quattro differenti Remocon, senza interferenze.
Quando viene impostato l’ID numero ‘1’, nella variabile A viene memorizzato il
valore preciso del tasto premuto.
Quando invece è impostato un ID pari a ‘2’, ‘3’ o ‘4’, la variabile A contiene
il valore del tasto aumentato rispettivamente di ‘32’, ‘64’ e ‘96’.
Quando si utilizza il programma Template.bas con un ID diverso da ‘1’, è
necessario modificare la riga di codice ‘CONST ID = 0’, inserendo il valore
‘32’, ‘64’ o ‘96’ a seconda dell’ID impostato.
Esempio:
A = REMOCON(1)
Memorizza nella variabile A il valore numerico associato al tasto premuto su
Remocon.
|
|
|
| Elenco revisioni | |
| 07/01/2011 | Aggiornato pagina |
| 04/08/2007 | Emissione preliminare |