
Scheda dei sensori
ultimo aggiornamento 9/11/2006
|
|
Scheda dei sensori ultimo aggiornamento 9/11/2006 |
|
|
|
l robot in progetto è un unione di
pezzi comuni con il robot
DeAgostini (la
base, i motoriduttori) e il robot
Monty fornito dalla Peruzzo (scheda
motori e
sensori) mentre il "cervello" è formato dalla scheda
Micropic Trainer con montato un PIC 16F84 ricevuto con l'abbonamento
all'opera della Peruzzo.
Nelle foto è visibile l'assemblaggio della base , della
motorizzazione con relativa scheda di controllo, e il fissaggio della
scheda principale
Sotto sono visibili le prime foto della creatura

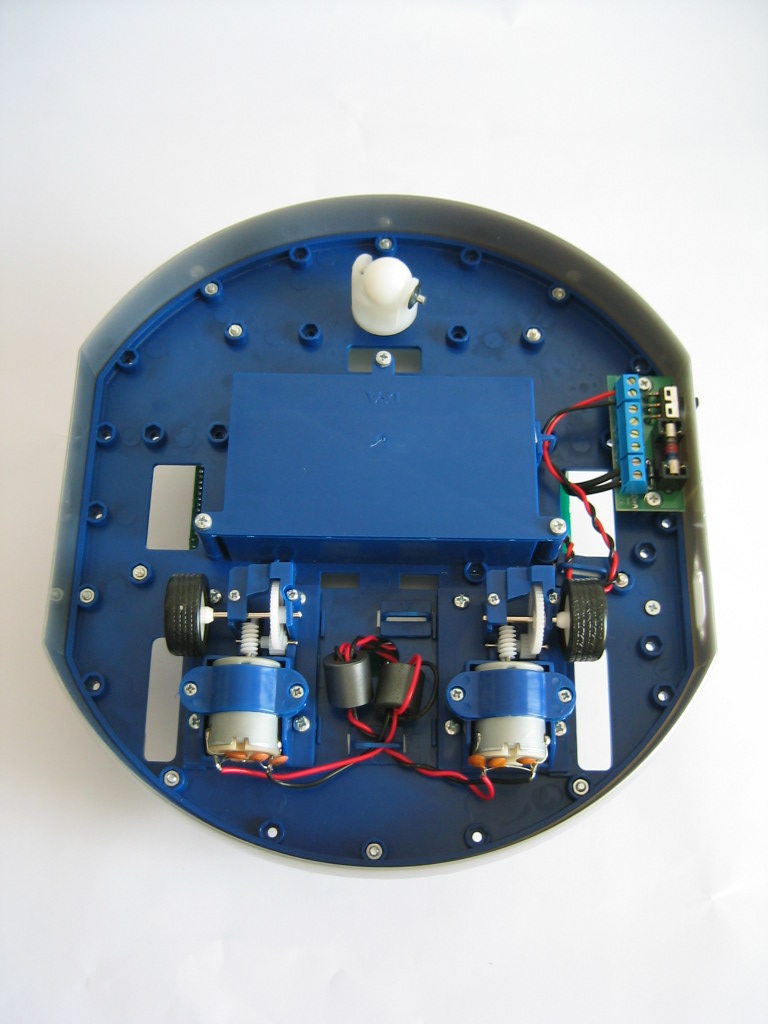
Vista dall'alto e da sotto della base del robot GOLDRAKE
(ricavata dalla DeA)
con visibile la
scheda MICROPIC TRAINER e la scheda controllo motori del
Monty.
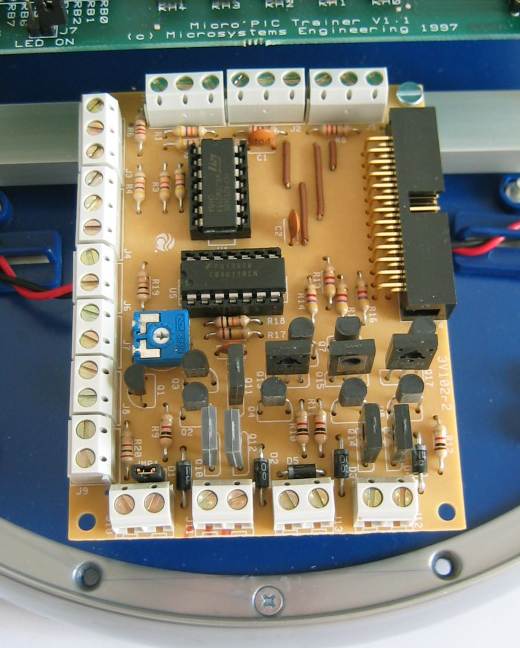
Dettaglio scheda di potenza proveniente dal progetto Monty

Dettaglio motoriduttori


Caratteristiche principali della scheda MICROPIC TRAINER
Supporta microcontrollori di gamma media sia da 18 che da 28 piedini. La frequenza di lavoro è di 4 MHz, modificabile sostituendo il cristallo di quarzo
Generazione automatica del RESET (POR) e manuale mediate pulsante azionato dall'utente.
5 ingressi digitali implementati attraverso 5 commutatori.
4 ingressi di tensione analogica, variabile attraverso potenziometro.
8 uscite digitali collegate ad 8 indicatori luminosi tipo led e/o a display di 7 segmenti. Attraverso jumpers di selezione
Connessione di un modulo di visualizzazione LCD di 2x16 (2 linee di 16 caratteri ognuna) e controllo contrasto attraverso potenziometro.
Periferiche d'ingresso disattivabili attraverso i rispettivi jumpers
Circuito di programmazione "in circuito". Permette , grazie al software di controllo dedicato, di riprogrammare il PIC, senza toglierlo dallo zoccolo.
Led indicatore di presenza tensione di registrazione
Connettore DB25 per connessione con canale parallelo CENTRONIX al computer
| Elenco revisioni | |
| 09/11/2006 | Aggiornato grafica pagina |
| 30/08/2005 | Aggiunto foto stato attuale costruzione |
| 12/06/2003 | Aggiornato pagina |
| 10/02/2003 | Emissione preliminare |

