![]()


ultimo aggiornamento 23 aprile 2017
|
ultimo aggiornamento 23 aprile 2017 |
|
|
|
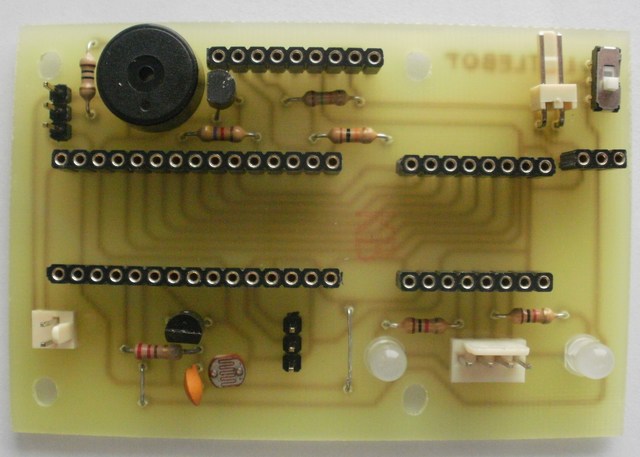
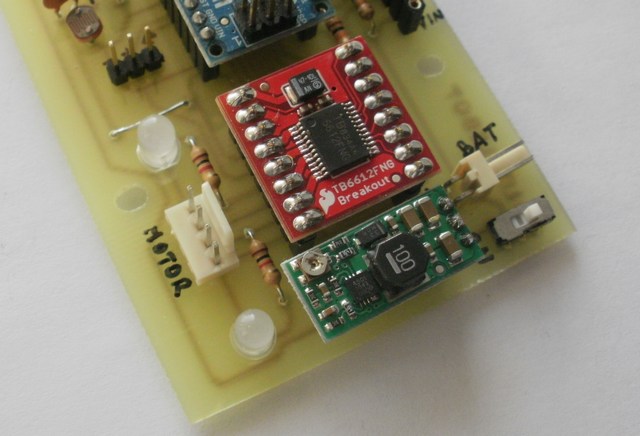
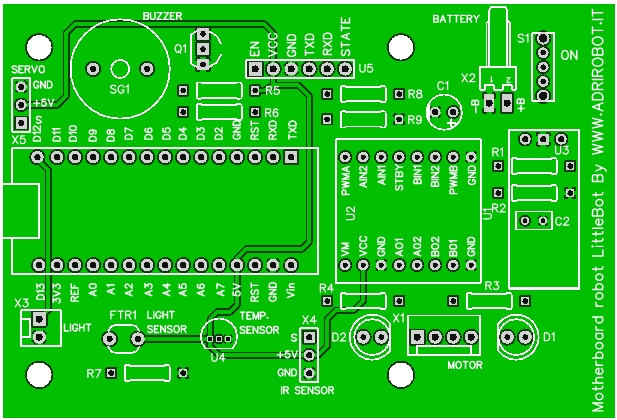
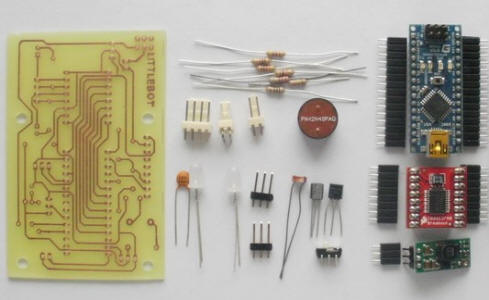
La scheda di controllo del robot Little BOT ha le dimensioni di 87x57mm. Su di essa sono installati :
Connettore per Arduino Nano
Connettore per Motor Driver 1A Dual TB6612FNG
Connettore per Modulo BlueSMiRF Silver
Connettore per modulo elevatore di tensione DC-DC
Uscita sonora tramite Buzzer
Sensore di temperatura LM35
Sensore di luce con fotocellula
Sensore di distanza con IR GP2D120
 |
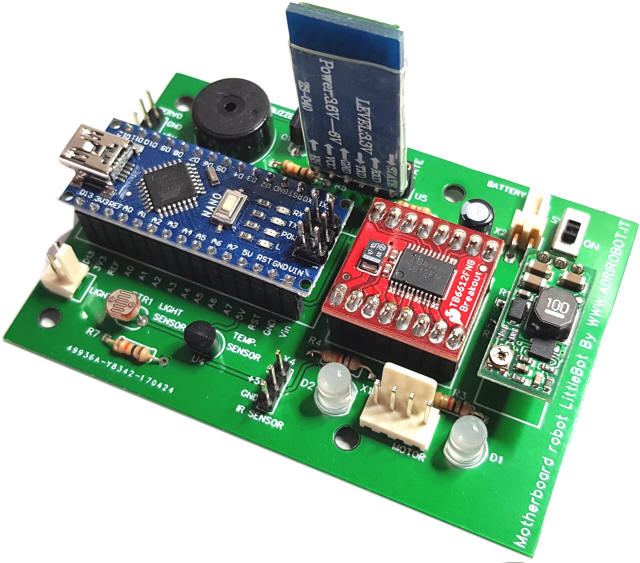 |
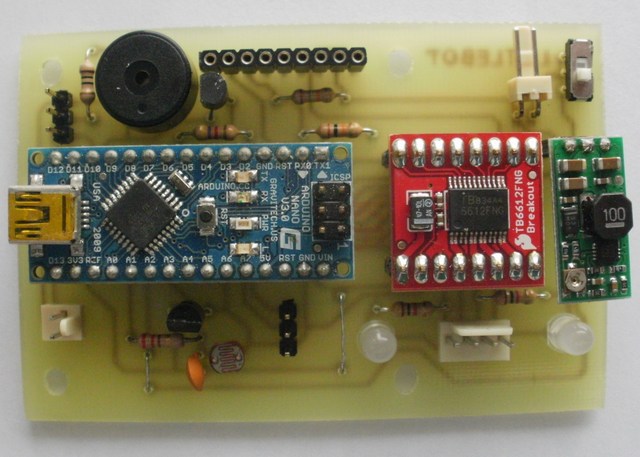
| Prima versione | Versione definitiva |
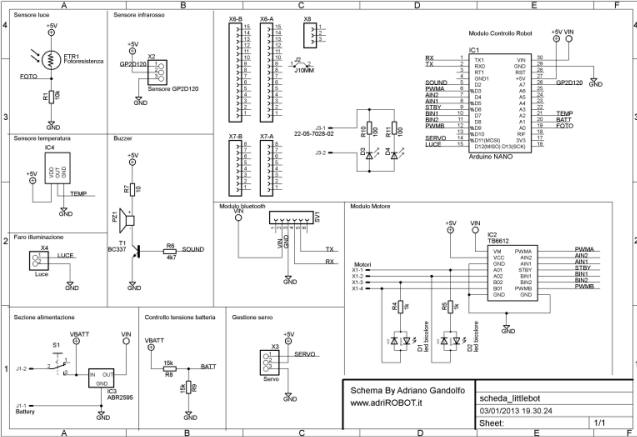
Schema elettrico della nuova
scheda realizzato con il programma EasyEDA
Un servizio per il
disegno di circuiti e la loro simulazione, progettazione e produzione di PCB.
Provalo è gratuito!
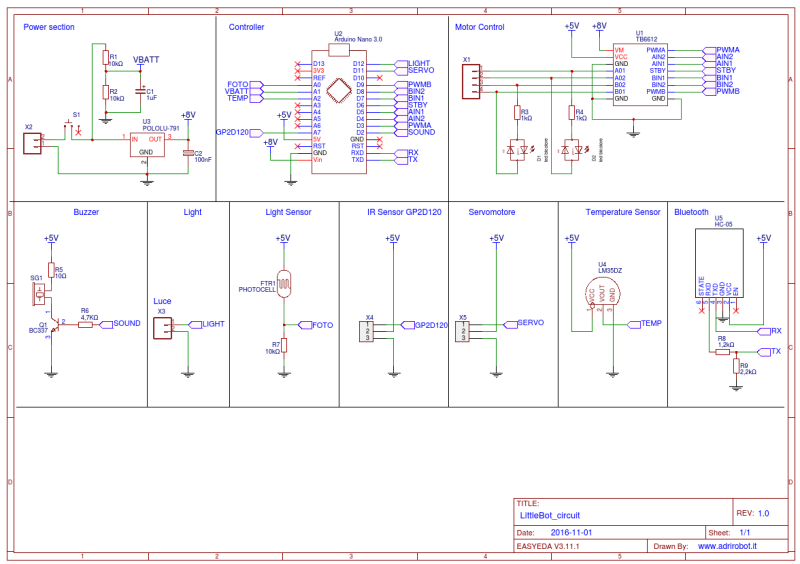

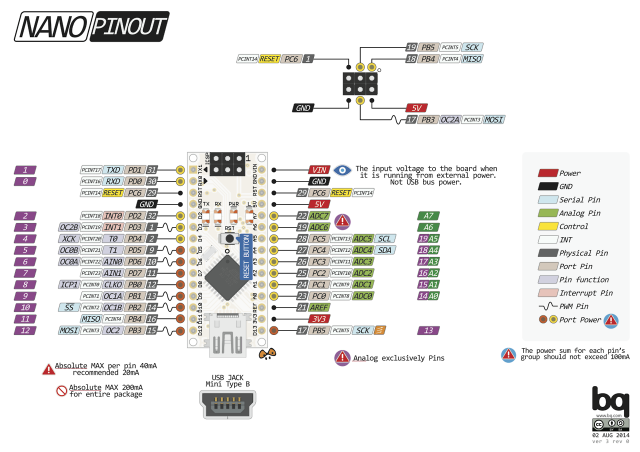
Il controllo del robot è dato da un Arduino Nano a cui sono collegati i vari sensori e moduli di controllo. In particolari cono utilizzati i seguenti pin
| Pin | Funzione |
| Pin Digitale 0 | RX da modulo Bluetooth |
| Pin Digitale 1 | TX da modulo Bluetooth |
|
Pin Digitale 2 |
Buzzer |
|
Pin Digitale 3 |
Velocità motore A PWMA |
|
Pin Digitale 4 |
Comando motore A AIN2 |
|
Pin Digitale 5 |
Comando motore A AIN1 |
|
Pin Digitale 6 |
Standby motori STBY |
|
Pin Digitale 7 |
Comando motore B BIN1 |
|
Pin Digitale 8 |
Comando motore B BIN2 |
|
Pin Digitale 9 |
Velocità motore A PWMB |
|
Pin Digitale 11 |
Comando Servo |
|
Pin Digitale 12 |
Faro |
|
Pin Digitale 13 |
Led su Arduino Nano |
|
Pin Analogico A0 |
Misurazione foto resistenza |
|
Pin Analogico A |
Misurazione tensione batteria |
|
Pin Analogico A2 |
Misurazione temperatura |
|
Pin Analogico A7 |
Misurazione distanza |

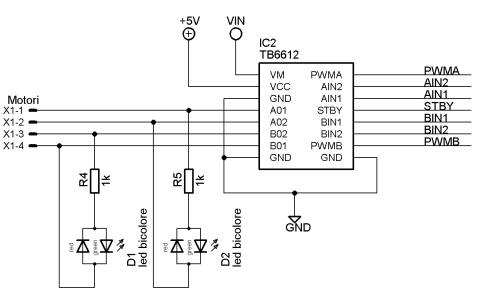
Per pilotare i due motoriduttori è
utilizzato un modulo in cui è utilizzato un integrato
TB6612FNG
che è in grado di pilotare due motori a corrente continua
con una
corrente costante di 1.2A (3.2A di picco) interfacciandosi con un micro
microcontrollore,
Per il pilotaggio sono utilizzati 7 linee digitali connesse al
processore. Il senso di rotazione è evidenziato da una coppia di
led Bicolore
 |
 |
| L-57EGW Led BI-COLORE 2 PIN | ||
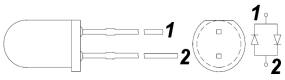 |
Codice RS 228-5720A |
 |
| Piedinatura | Datasheet | Foto |
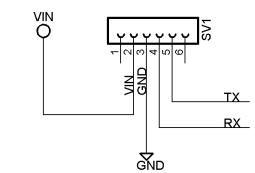
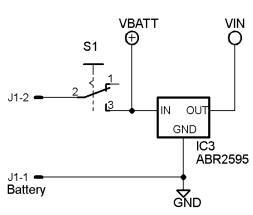
Il connettore SV1 è utilizzato per l'installazione del Modulo BlueSMiRF Silver tramite il suo connettore JP1 in cui sono presenti sia segnali di trasmissione e ricezione come quelli di alimentazione. Dei sei presenti sono utilizzati solamente RX, TX, Vin, GND
|
|
|
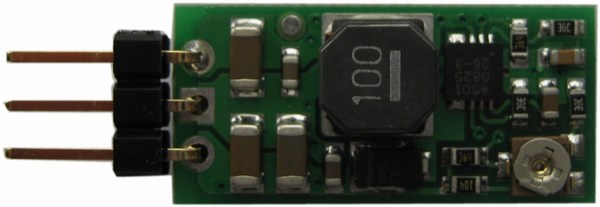
Per elevare la tensione della batteria Batteria Li-ion 3,7V 1840mA/h
a quella di 9V, viene utilizzato un elevatore
mini Convertitore DC/DC prodotto dalla
Pololu
Si basa su un integrato SC4501 Semtech (regolatore di commutazione con Soft-Start- 2 Amp, 2 Boost
MHz ).
Questo integrato accetta una tensione di ingresso
compresa tra 1,5 e 16 Volt, e produce un output regolabile (tramite un
potenziometro) tra 2,5 e 9,5 Volt,
a
circa l'80% di efficienza.
 |
 |
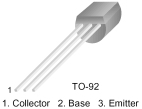
Il robot dispone per eventuali segnalazioni acustiche di un buzzer pilotato tramite un transistor NPN tipo BC 337.
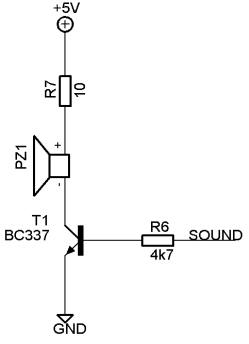
| Transistor NPN BC337/338 Switching and Amplifier Applications | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
Il robot dispone di un sensore di luce rappresentato da una fotoresistenza. La variazione di resistenza provoca una variazione del valore della tensione che può essere letta dalla porta analogica del processore.
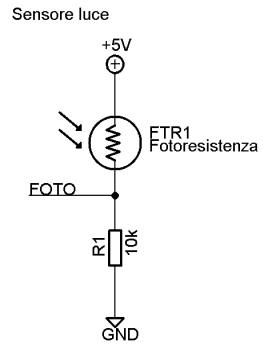
| Fotoresistenza | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
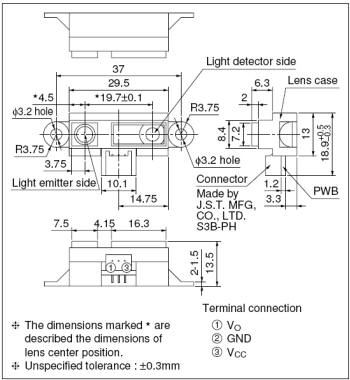
Il robot dispone di un sensore di distanza della serie GP2D120 prodotto dalla SHARP
 |
 |
Sezione sensore di temperatura
Il robot dispone di un sensore di temperatura tipo LM35, che fornisce un’uscita una tensione proporzionale alla temperatura rilevata che è pari a 10 mV per ogni grado centigrado che viene letta tramite una porta analogica

| LM 35 Sensore di temperatura di precisione (Gradi centigradi) | ||
 |
Codice RS 533-5907 |
 |
| Piedinatura | Datasheet | Foto dell'integrato |
|
|||||||||||||||||||||||
|
|||||||||||||
| Elenco revisioni | |
|
23/04/2017 |
Inserito riferimento nuovo PCB |
|
25/01/2013 |
Aggiornato pagina |
|
25/02/2012 |
Emissione preliminare |