![]()


ultimo aggiornamento 30 novembre 2014
|
ultimo aggiornamento 30 novembre 2014 |
|
|
|
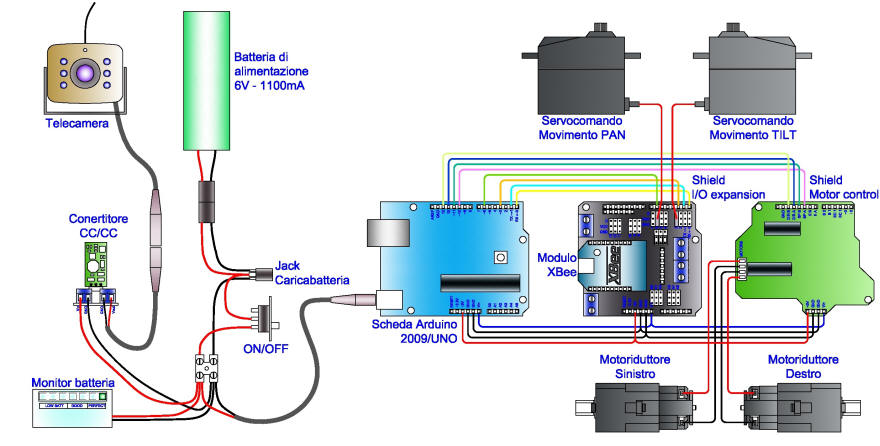
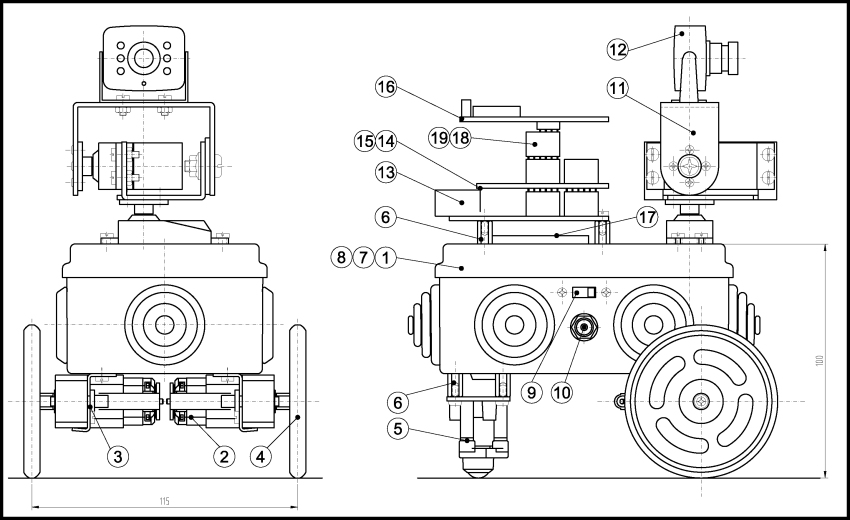
Il robot qui
presentato del tipo esploratore è basato sulla
Scheda
di controllo della serie Arduino che potrà essere una
Arduino
2009 o
Arduino UNO, per muoversi utilizza
due ruote in ABS azionate da
due
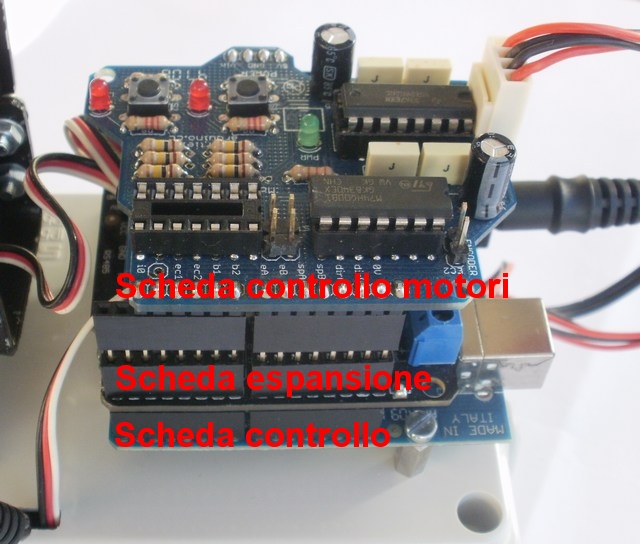
motoriduttori che sono comandati (nel primo prototipo) da una
scheda che utilizza L293
auto costruita
, mentre nella versione definitiva da una
scheda motor shield.
Per il comando del robot è previsto l'utilizzo di un
gamepad con 2 joystick analogici, compatibile con
Playstation 2, questo è connesso ad una
stazione di
controllo formata una seconda scheda Arduino su qui è montato un
Modulo XBee. Il
Modulo XBee
trasmittente comunica con quello ricevente installato sul robot su una
DFRobot I/O Expansion
Shield.
Il robot dispone poi di una telecamera wireless alimentata
tramite un
convertitore DC/DC e mossa da un
dispositivo pan & tilt.
I
programmi di
gestione sono due uno da installarsi nella stazione di controllo e uno
sul robot.


Il progetto del robot ArduinoBOT è presentato anche tramite la rivista Fare elettronica con gli articoli presenti nei seguenti numeri
|
317 |
Novembre 2011 |
ArduinoBOT (prima parte) - Presentazione |
|
318 |
Dicembre 2011 |
ArduinoBOT (seconda parte)- Le schede principali |
|
319 |
Gennaio 2012 |
ArduinoBOT (terza parte) - Costruzione |
|
320 |
Febbraio 2012 |
ArduinoBOT (quarta parte) - La stazione di controllo |



Pin scheda Arduino Utilizzati
|
Pin scheda Arduino |
Funzione nel robot ArduinoBOT |
|
Pin +5V |
+5V |
|
Pin GND |
GND |
|
Pin Vin |
+6V Batteria |
|
Pin digitale 0 |
RX XBee |
|
Pin digitale 1 |
TX Xbee |
|
Pin digitale 3 |
PWM pin 3 servo TILT (alto-basso) |
|
Pin Digitale 6 |
PWM pin 10 servo PAN (destra-sinistra) |
|
Pin Digitale 13 |
Direzione Motore DX (DIR B) |
|
Pin Digitale 12 |
Direzione Motore SX (DIR A) |
|
Pin Digitale 11 |
PWM Velocità Motore DX (SP B) |
|
Pin Digitale 10 |
PWM Velocità Motore DS (SP A) |

 |
 |
|
Numero |
Quantità |
Descrizione |
|
1 |
1 |
|
|
2 |
2 |
Motoriduttore Gear Motor 2 - 224:1 Offset Shaft – Solarbotics |
|
3 |
2 |
|
|
4 |
2 |
|
|
5 |
1 |
|
|
6 |
7 |
Distanziale Esagonale M/F 3 MA x L=10 mm |
|
7 |
1 |
Batteria tipo NI-MH dimensione 2/3A, tensione nominale 6V, con una capacità minima di 1100mAh |
|
8 |
1 |
|
|
9 |
1 |
Deviatore a slitta |
|
10 |
1 |
Presa di alimentazione femmina da pannello |
|
11 |
1 |
|
|
12 |
1 |
Telecamera dotata di trasmettitore incorporato |
|
13 |
1 |
Scheda Arduino 2009 oppure UNO |
|
14 |
1 |
|
|
15 |
1 |
Modulo XBee |
|
16 |
1 |
|
|
17 |
1 |
Monitor per batteria |
|
18 |
1 |
Strip di tipo Maschio/Femmina 6 vie |
|
19 |
2 |
Strip di tipo Maschio/Femmina 8 vie |
| Elenco revisioni | |
| 30/11/2014 | Aggiornato pagina |
| 25/02/2012 | Aggiornato pagina, inserito elenco componenti |
| 16/10/2011 | Aggiornato pagina |
| 21/06/2011 | Aggiornato pagina |
| 21/03/2011 | Aggiornato pagina |
| 23/02/2011 | Emissione preliminare |

