![]()
![]()
ultimo aggiornamento 25 agosto 2008
|
|
ultimo aggiornamento 25 agosto 2008 |
|
|
|

![]()
![]()
|
|
|
|
Modulo
sensore testa: questo modulo è necessari durante la fase 1
per il controllo del modulo occhi, del motore per l'inclinazione della
testa del sensore di sfioramento posti all'interno della testa. Nel corso della fase 2 la gestione degli occhi e del motore della testa passeranno alla scheda sound follower mentre resterà in gestione a questo modulo il sensore di sfioramento.
|
|
|
|
|
|
|
|
|
Modulo
belt bag: questo modulo allegato al fascicolo n°13 permette di
collegare la parte di alimentazione e il sistema sonar posti all'interno
del marsupio.
|
|
|
|
|
|
|
|
|
Modulo Head controller
(sound follower): questo modulo è basato sul
microcontrollore a 8 bit MC68HC908AP8
, dotato di 8 KB di memoria Flash e 1 KB di RAM. Ha il compito di elaborare i segnati provenienti dai tre microfoni dei Sound Follower, posizionati all'interno degli 'occhi' e nella parte posteriore della testa dei robot, allo scopo di determinare la provenienza dei suoni. Inoltre, gestisce entrambi i gradi di mobilità della testa. cioè quello di 'pan' (rotazione destra/sinistra) e quello di 'tilt' (rotazione alto/basso). Grazie agli encoder ottici collegati ai due motori, il modulo è in grado di coordinare in ogni istante i movimenti della testa in modo da raggiungere la posizione desiderata. Ogni volta che si sfiora la parte alta della testa dei robot, l'apposito sensore di sfioramento lo comunica al modulo, il quale, attraverso un bus, trasferisce l'informazione a tutti gli altri e in particolare al modulo Brain & Vision, il quale implementa la rete neurale che gestisce la 'personalità' dei robot, Infine, il modulo Head Controller gestisce tutti i led colorati degli 'occhi' e delle 'orecchie', rendendoli utilizzabili anche da tutti gli altri moduli collegati al bus. |
|
|
|
|
|
|
|
|
Modulo
display LCD: per comunicare con l'esterno il robot
dispone di un display a cristalli liquidi. Il display costituisce un importante strumento per il monitoraggio dello "stato di salute" di I-Droid 01. Esso, infatti, mostrerà varie informazioni riguardanti, tra l’altro, il livello di carica delle batterie (sia per la sezione che alimenta i motori, sia per quella che alimenta i dispositivi elettronici), lo stato dei motori e della dotazione elettronica del robot. |
|
|
|
|
|
|
|
| Modulo keyboard: per dialogare con la motherboard è previsto l'utilizzo di una semplice tastiera dotata di 3 tasti. |
|
|
|
|
|
|
|
| Encoder: per il controllo della rotazione sono impiegati 4 tipi di encoder |
|
|
|
|
|
|
|
|
Modulo
Motherboard: la Motherboard ha il compito fondamentale
di alimentare con la tensione corretta tutti gli altri moduli (e da qui
viene il suo nome), ma svolge anche altre importanti funzioni. In questo modulo e presente un microcontrollore a 8 bit tipo MC68HC908AP8 con 8 KB di memoria Flash e 1 KB di RAM. La tensione delle batterie, sia quelle dedicate ai motori sia quelle dedicate all'elettronica, è continuamente monitorata da questo modulo, che rende disponibile l'informazione attraverso il bus di comunicazione. Inoltre, la Motherboard si occupa di gestire il display alfanumerico e la tastiera a tre pulsanti presenti nella parte frontale del corpo dei robot. |
|
|
|
|
|
|
|
|
Modulo Voice: esso è
responsabile della gestione dei riconoscimento vocale, della
riproduzione della voce dei robot e della registrazione e riproduzione
dei messaggi sonori. |
|
|
|
|
|
|
|
|
Modulo Bluetooth: permette al robot di comunicare senza fili con dispositivi quali
telefoni cellulari, palmari o personal computer compatibili. |
|
|
|
|
|
|
|
|
Modulo RS232-USB: allegato
al fascicolo 50 permette di collegare il robot al PC tramite cavo (non
utilizzando il modulo bluetooth) sono disponibili due tipologie di porte
la "vecchia" RS232 che ultimamente va scomparendo e la nuova USB. |
|
|
|
|
|
|
|
|
Modulo Brain & Vision (B&V): è
sicuramente il più 'potente'
all'interno dei robot. Contiene infatti un microprocessore Freescale Dragonball l.MXL MC9328MXL a 150 MHz con 16 MB di memoria Flash e 16 MB di RAM. Il sistema operativo installato su questo modulo è di Linux embedded, in particolare dotato di kernel linux 2.4 con appositi ampliamenti e alcune modifiche ad-hoc. li modulo B&V gestisce il comportamento di I-Droid e il suo 'sistema emotivo', attraverso l'uso di una rete neurale software che evolve nel tempo in base agli input sensoriali ricevuti. Le modifiche della rete neurale comportano un cambiamento dello stato di umore dei robot e quindi anche dei suo comportamento. il modulo è direttamente collegato alla telecamera CMOS, grazie alla quale può ricevere ed elaborare le immagini 'viste' dal robot e riconoscere la presenza e il movimento di volti, mani o altri oggetti colorati. Questo modulo, inoltre, è necessario per la programmazione avanzata del robot, |
|
|
|
|
|
|
|
|
Modulo camera CMOS: permette di
dare al vista al robot, si tratta di una camera a colori con risoluzione
640x480. Va collegata al modulo Brain & vision |
|
|
|
|
|
|
|
|
Moduli luci di posizione:
permettono di viaggiare con il robot nell'oscurità. Si tratta di due piccole schede ognuna con due led bianca ad alta luminosità montati all'interno dei riduttori delle ruote. |
|
|
|
|
|
|
|
| Modulo scheda cavi: il suo compito è di connetter i cavi provenienti dal cavo encoder e motore DX e dalle luci di posizione ad altrettanti cavi di collegamento con funzione di prolunga . |
|
|
|
|
|
|
|
| Modulo sonar: sono presenti 3 diversi moduli sul primo sono presenti due emettitori e un ricevitore, gli altri due presentano un ricevitore, sono pilotati dal modulo base controller |
|
|
|
|
|
|
|
| Il sensore di temperatura formato dall'integrato LM35, permette di rilevare la temperatura ambiente |
|
|
|
|
|
|
|
|
Modulo chiamato 'Base Controller:' è basato su un microcontrollore
MC9S08GT16 a 8 bit,
dotato di 16 KB di memoria Flash e 1 KB di RAM. Gestisce i due motori delle ruote del robot e i relativi encoder ottici, nonché il motore che permette al robot di 'alzarsi e sedersi'. Inoltre supervisiona direttamente i cinque sensori a ultrasuoni (due trasmettitori e tre ricevitori) che permettono a I-Droid 01 di 'vedere' gli ostacoli posti intorno a lui. Le informazioni provenienti dai sensori sono rese disponibili sul bus di comunicazione. |
|
|
|
|
|
|
|
|
Modulo Arms:, è equipaggiato con un microcontrollore
MC68HC908AP8
a 8 bit, dotato di 8 KB di memoria Flash e 1 KB di RAM, gestisce i
motori e i relativi encoder ottici delle braccia, da cui il suo nome
(infatti 'braccia' è la traduzione di arms). Inoltre controlla il sensore di temperatura, le luci di posizione, i taci eventualmente collegato alle braccia, nonché tutti gli ingressi e le uscite , "general purpose' disponibili sulla breadboard montata al di sopra dei marsupio di I-Droid 01 |
 |
|
|
|
|
|
|
| Moduli interfaccia Arms: All'interno delle braccia del robot sono inserite due piccole basette interconnesse tra loro e che a loro collegate con il modulo arms controller. |
  |
|
|
|
|
|
|
|
Torcia luminosa con led ad alta luminosità, essa è montata sul braccio da cui riceve l'alimentazione |
|
|
|
|
|
|
|
|
Modulo trasmettitore e ricevitore per il telecomando, su di esso sono presenti un diodo per emissione del segnale di comando nel campo dell'infrarosso, è inoltre presenze un integrato che decodifica i segnali e li invia alla scheda di controllo per la loro gestione. |
|
|
|
|
|
|
|
|
Modulo controllo per il telecomando: il modulo permette il dialogo tra il robot e il modulo trasmettitore/ricevitore. Sulla scheda è presente un microprocessore. |
|
|
|
|
|
|
|
|
Modulo di gestione pinza: il modulo permette il pilotaggio del motore presente all'interno della pinza. Sulla scheda è presente un microprocessore che si occupa anche di controllare la forza di chiusura della pinza. |
|
|
|
|
|
|
|
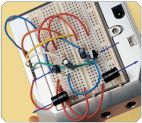
| Sensori montati su Breadboard: La breadboard permette la realizzazione di due tipologie di sensori: luce e infrarossi. |
|
|
|
|
| Elenco revisioni | |
| 25/08/2008 | Aggiornato pagina, inserito link alla torcia, e agli encoder |
| 22/06/2007 | Inserito link modulo trasmettitore/ricevitore, modulo controllo telecomando, modulo controllo pinza |
| 23/05/2007 | Inserito link breadboard e sensori luce infrarossi |
| 26/01/2007 | Inserito link modulo Arms controller e della loro interfaccia. |
| 19/01/2007 | Inserito link modulo belt-bag |
| 09/01/2007 | Inserito link modulo sensore di temperatura |
| 07/12/2006 | Inserito link modulo camera CMOS, base controller, luci di posizione, modulo cavi di collegamento, moduli sonar,inserito indice |
| 06/10/2006 | Inserito link modulo Brain & Vision |
| 07/09/2006 | Inserito link modulo RS232-USB |
| 18/07/2006 | Inserito link modulo bluetooth |
| 03/05/2006 | Inserito link modulo keyboard |
| 28/04/2006 | Inserito link modulo voice |
| 24/03/2006 | Inserito link modulo Motherboard |
| 06/03/2006 | Inserito modulo occhi e modulo sensore testa. |
| 22/02/2006 | Inserito modulo display LCD |
| 14/02/2006 | Emissione preliminare |