I-Droid 01 è stato prodotto
dalla della DeAgostini, i primi fascicoli sono usciti in edicola il 20
agosto 2005. Furono previste 75 a cui si aggiunsero
poi altre 15 uscite, composte da un fascicolo e dai componenti per la
realizzazione del Robot "I-Droid 01".
Nel fascicolo n. 1 era allegato un DVD di presentazione delle funzioni
del Robot e contenente anche interviste e altri filmati sulla storia del
progetto “I-Droid 01”.
La costruzione del robot era divisa in 9 fasi.
In corso d’opera furono allegati anche 4 CD ROM con il software per la
programmazione del Robot. Per conservare i fascicoli furono previsti 3 raccoglitori a tasca. Il robot
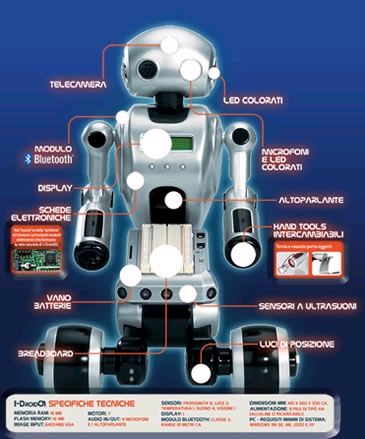
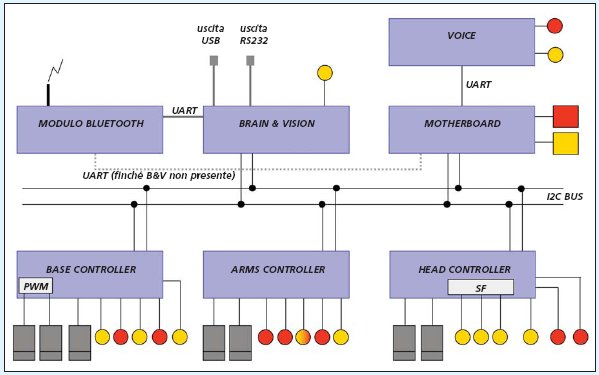
è comandato da 7 moduli che montano
diversi processoridi diverse case produttrici.
Schema a blocchi del collegamento dei
moduli
(cliccare sulle aree sensibili per maggiori informazioni)
Scheda tecnica
PESO
2 Kg
VELOCITA'
30 cm/s
(max)
GRADI DI LIBERTA'
7
attuati, 4 non attuati
RUOTE
3 (2 GdL):
- 2 ruote attuate indipendenti
- 1 ruotino di appoggio non attuato
BRACCIA
2 (x 3
GdL ciascuno):
- flessione/estensione spalla attuato
- abduzione/adduzione spalla non attuato
- flessione/estensione gomito non attuato, con
frizione
SOM,
esclusiva per l'evoluzione "emotiva" del robot
RICONOSCIMENTO VOCALE
Modulo
Voice con 50
comandi "speaker independent", ad attivazione
singola o composita, da un vocabolario di 40+
termini (attualmente non espandibile)
- 1 password biometrica "speaker dependent"
SINTESI VOCALE
60+
frasi precaricate (attualmente non espandibile)
- 3 led
x 3 colori x 2 occhi (attivabili per colore e
occhio)
- 1 led x 2 orecchie (attivabili singolarmente)
- 2 led x 2 ruote (attivabili tutti insieme)
- 1 led x accessorio torcia (attivabile)
- altri led diagnostici
REGISTRAZIONE AUDIO
Max 10
messaggi da 16 secondi ciascuno
ACCESSORI
Vassoio,
torcia, carica-batterie, cavetto seriale, cavetto USB
Testa. Al
termine di questa fase il robot era in grado di muovere la testa,
il sensore di sfioramento ed i led posti al suo interno facevano si
che potesee reagire alle carezze mostrando le sue emozioni. In
seguito la testa ospiterà anche il modulo sound follower e la
CMOS camera.
Fascicoli dal n° 1 al n° 6.
Sistema uditivo,
collo, vano batterie. I microfoni ed il
modulo sound follower
installati nella testa permetteranno a I-Droid 01 di reagire agli
stimoli sonori e individuarne la provenienza.
Fascicoli dal n° 7 al n° 17.
Motherboard e
sistema audio vocale. Dopo l'installazione del
modulo voice
e della motherboard si potrà dialogare con il robot. Grazie al
sistema di riconoscimento vocale ed a uno speaker posizionato nella
sua pancia, I-Droid 01 potrà riconoscere ed eseguire i comandi vocali
e rispondere con la propria voce. Inoltre, se lo si desidera, il
robot risponderà solo ad una persona, basterà impostare l'apposita
password biometrica.
Fascicoli dal n° 18 al n° 33
Modulo comunicazione e bluetooth. Con l'installazione del modulo
Bluetooth si potrà comandare I-Droid 01 dal PC o da un cellulare
bluetooth-compatibile: utilizzando la tastiera del telefonino o il
mouse del PC si potrà muovere la testa di I-Droid 01.
Altre funzioni
saranno disponibili quando il robot sarà completato.
Viene assemblato il
riduttore
ruota destra
Fascicoli dal n° 34 al n° 42
Modulo brain &
vision - CMOS camera. Questo modulo è il cuore e l'anima di I-Droid01, un
elemento fondamentale della rete neurale del robot, in grado di
rispondere agli stimoli e di trasformarli in stati emotivi che
possono essere espressi con movimenti del corpo, emissioni di luce e
suoni. Tramite questo modulo, inoltre, avviene il controllo della
telecamera e la programmazione avanzata del robot via pc.
La telecamera è l'occhio di I-Droid 01, consente al robot di
riconoscere gli essere umani e di seguirli nei loro spostamenti. Le
immagini catturate dalla telecamera, inoltre, possono essere
trasmesse via radio al tuo cellulare bluetooth o al tuo PC e
trasformate in istantanee.
Viene fornito il modulo
per il collegamento del robot con il PC tramite le porte RS232 e
USB.
In questa fase viene completato in riduttore ruota sinistra.
Fascicoli dal n° 43 al n° 53
Sistema di
navigazione. Al termine di questa fase di costruzione si potrà
far muovere I-Droid01 in tutte le direzioni e a velocità variabile.
Inoltre grazie a un motore collocato all'altezza del bacino il robot
è in grado di alzarsi e abbassarsi di qualche centimetro,
incrementando in tal modo le proprie capacità motorie ed espressive.
Fascicoli dal n° 54 al n° 63
Breadboard e
controllo via internet. La breadboard è una piattaforma di
sperimentazione elettronica con la quale si possono costruire
circuiti senza dover effettuare alcuna saldatura. Questo consente di
personalizzare il robot aggiungendo nuove funzioni, per esempio la
possibilità di reagire alla luce.
La breadbord si monta e smonta
facilmente ed è collocata sulla parte superiore del marsupio
porta-batterie.
In questa fase viene allegato il terzo CD-ROM contenente il software
per controllare I-D01 via internet.
Fascicoli dal n° 64 al n° 67.
Braccia e hand
tool. Le braccia di I-Droid01 hanno giunture e movimenti simili
a quelli delle braccia umane e possono assumere diverse posizioni
utilizzando un sistema a denti di arresto. All'altezza delle
spalle, il robot è dotato inoltre di due motori per alzare ed
abbassare le braccia e può essere equipaggiato con alcuni strumenti,
per esempio, una torcia per illuminare l'ambiente circostante.
I motori sono controllati grazie a un'apposita scheda elettronica,
quella del modulo Arms. Inoltre le braccia fungono
da porte di espansione (con connettore mini USB).
Fascicoli dal n° 68 al n° 75.
Mano
prensile. Con un'estensione dell'opera vengono forniti i
componenti per la costruzione di una mano prensile che andrà a
sostituire il vassoio posto sul braccio destro.
Vengono inoltre forniti nuovi sensori da installare sulla breadbord.
Si monta inoltre uno speciale telecomando ad infrarossi.
Fascicoli dal n° 76 al n° 90.
COPERTURA PER
‘ORECCHIO’ SINISTRO, PARTE FRONTALE DELLA TESTA, RIFLETTORE PER LED,
LED, MASCHERA IN PLASTICA PER GLI ‘OCCHI’, 5 VITI DA 2,6X6 MM,
PROTEZIONE IN PLASTICA PER IL FORO DELLA TELECAMERA NELLA PARTE FRONTALE
DELLA TESTA
20-08-2005
2
MICROFONO PER MODULO
SOUND FOLLOWER, PARTE POSTERIORE DELLA TESTA, VANO PROVVISORIO PER LE
BATTERIE, 2 VITI DA 2,6X6 MM, 4 VITI DA 3X8 MM, SUPPORTO IN PLASTICA PER
MICROFONO
29-08-2005
3
CHIGLIA PER LA
TRASMISSIONE DEL MOVIMENTO ALLA TESTA, ALBERI E INGRANAGGI DI MOVIMENTO
DELLA TESTA, SCATOLA DEL MOTORE PARTE INFERIORE, CIRCUITO PER L’ENCODER
OTTICO, VITE DA 2X6 MM, 4 VITI DA 2,6X6 MM, SCATOLA DEL MOTORE PARTE
SUPERIORE, MOTORE PER IL MOVIMENTO DELLA TESTA
06-09-2005
4
RIFLETTORE PER LED,
COPERTURA PER ‘ORECCHIO’ DESTRO, CIRCUITO CON LED PER ‘OCCHIO’, 2 VITI
DA 2,6X6 MM, LED PER ‘ORECCHIO’, COPERCHIO DEL VANO DELLE BATTERIE,
MICROFONO PER MODULO SOUND FOLLOWER
14-09-2005
5
MICROFONO PER MODULO
SOUND FOLLOWER, ELEMENTO DI SUPPORTO DESTRO, ELEMENTO DI SUPPORTO
SINISTRO, 4 VITI DA 2,6X8 MM, CIRCUITO CON LED PER ‘OCCHIO’
21-09-2005
6
BASE TEMPORANEA,
SCHEDA CON CIRCUITO STAMPATO, SENSORE DI SFIORAMENTO, 2 VITI DA 3X8 MM
DI TIPO FLANGIATO, 2 VITI DA 2,6X6 MM
ALBERO CON PULEGGIA E RUOTE DENTATE, PRIMA PARTE DELLA SCATOLA DEL
MOTORE, CINGHIA DI TRASMISSIONE
05-10-2005
8
SECONDA PARTE DELLA SCATOLA DEL MOTORE, ALBERO CON RUOTE DENTATE, 4 VITI
DA 2,6X8 MM
12-10-2005
9
MOTORE ELETTRICO PER MOVIMENTO SINISTRA/DESTRA DELLA TESTA, 2 VITI DA
3X8 MM, SUPPORTO CIRCOLARE PER L'ANCORAGGIO DEL COLLO E PER IL SOSTEGNO
DEL CIRCUITO DELL'ENCODER
19-10-2005
10
SUPPORTO PER MODULO SOUND FOLLOWER, VITE DA 2X6 MM, DISCO FORATO PER
ENCODER OTTICO, RUOTA DENTATA PER TRASFERIMENTO DEL MOTO ALLA TESTA, 2
VITI DA 3X8 MM, SUPPORTO IN PLASTICA PER RACCOLTA CAVI, CIRCUITO PER
L'ENCODER OTTICO
26-10-2005
11
METÀ SUPERIORE DELLA SCATOLA DEL MARSUPIO, VITE DA 2,6X8 MM, COPERCHIO
DEL VANO DEFINITIVO DELLE BATTERIE
02-11-2005
12
SECONDA METÀ DELLA SCATOLA DEL MARSUPIO, SUPPORTO RETTANGOLARE, 4 VITI
DA 2,6X8 MM, 2 VITI DA 3X8 MM
09/11/2005
13
SUPPORTI CON PIASTRE DI COLLEGAMENTO PER IL VANO DELLE BATTERIE, PRIMO
CONNETTORE PER CARICABATTERIA, SECONDO CONNETTORE PER CARICABATTERIA,
CIRCUITO CON CONNETTORE PER COMUNICAZIONE TRA MARSUPIO E CORPO,
CONNETTORE E CIRCUITO DI ALIMENTAZIONE, 6 VITI DA 2,3X6 MM, INTERRUTTORE
GENERALE, CONNETTORE E BUS DI COMUNICAZIONE TRA MARSUPIO E BREADBOARD, 2
VITI DA 2,6X6 MM, 4 VITI DA 2,6X8 MM
16/11/2005
14
VANO DEFINITIVO PER OTTO BATTERIE AA, CAVETTO DI ALIMENTAZIONE PER IL
SENSORE DI SFIORAMENTO, CAVETTO DI COMUNICAZIONE PER IL SENSORE DI
SFIORAMENTO, CAVETTO DI ALIMENTAZIONE PER LA TESTA
23/11/2005
15
SCHEDA DEL MODULO HEAD CONTROLLER - SOUND FOLLOWER
30/11/2005
16
PARTE FRONTALE DEL TORACE, SUPPORTO RETTANGOLARE, 2 VITI DA 2,6X8 MM, 4
VITI DA 3X8 MM DI TIPO FLANGIATO
07/12/2005
17
SUPPORTO PER IL TORSO, PRIMA PARTE DELLA SCATOLA DEL MOTORE DI
AZIONAMENTO DEL BRACCIO SINISTRO, COPERCHIO DELLA SEDE PER DISCO
DELL’ENCODER, RUOTE DENTATE PER LA SCATOLA DEL MOTORE
albero
di movimento del braccio, albero con vite senza fine e puleggia, seconda
parte della scatola del motore, cinghia di trasmissione, disco per
l’encoder, 3 viti da 2,6x6 mm, 5 viti da 2,6x8 mm, bustina di grasso
lubrificante
28/12/2005
20
elementi con ruote dentate per la scatola del motore:
- elemento con ruote grande/media
- elemento con ruote grande/piccola
- albero con molla e due ruote dentate
- albero con piccola ruota dentata
- elemento con ruote media/piccola
prima parte della scatola del motore per il braccio destro, coperchio
della sede per il disco dell’encoder
04/01/2006
21
Motore
elettrico per braccio destro
11/01/2006
22
Seconda
parte della scatola del motore, albero con vite senza fine e puleggia,
albero di movimento del braccio destro, bustina di grasso lubrificante,
5 viti da 2,6x8 mm, 3 viti da 2,6x6 mm, disco per l’encoder, cinghia di
trasmissione
18/01/2006
23
Display a cristalli liquidi, 2 viti da 2,6x8 mm, piastra di sostegno per
il display
25/01/2006
24
Circuito del tastierino, cavo di collegamento a sei fili per la
motherboard, 3 bottoni per il tastierino, 2 viti da 2,6x8 mm
01/02/2006
25
Supporto
per la motherboard, il modulo base e il brain & vision, 10 viti da 2x6
mm, supporto con fessura ad h per lo speaker, speaker, 2 viti da 3x8 mm
08/02/2006
26
Cavo
a venti fili per il collegamento marsupio-base e marsupio-arms, cavo a
sei fili per il collegamento motherboard-voice, cavo a tre fili per
l’alimentazione della motherboard
15/02/2006
27
Circuito
per l’encoder ottico del braccio destro, Supporto per il microfono,
Circuito per l’encoder ottico del braccio sinistro, Cavo a cinque fili,
Cavo a tre fili, Cavo a due fili, Microfono per modulo voice.
22/02/2006
28
Motherboard
01/03/2006
29
Ruota
con numero 1, ruota con numero 2, ruota con numero 3, albero con due
ruote dentate (con numero 4), albero con vite senza fine e puleggia,
ruota con numero 5, ruota con numero 7
08/03/2006
30
Circuito per l’encoder ottico, elemento numero 8 della sequenza di
ingranaggi, elemento numero 6 della
sequenza di ingranaggi, cinghia di trasmissione, disco per l’encoder.
In allegato, il primo CD-Rom
15/03/2006
31
Coperchio per la puleggia, metà destra della scatola del bacino, metà
sinistra della scatola del bacino, elemento di supporto per i cavi, 8
viti da 2,6x8 mm. In allegato, bustina di grasso lubrificante.
Parte destra del supporto per la ruota posteriore, 4 viti da 3x8 mm di
tipo flangiato,vite da 2,6x6 mm, 4 viti da 3,8x8 mm.
12/04/2006
35
Parte destra del bacino, 7 viti da 3x10 mm
19/04/2006
36
Elemento di connessione della ruota destra, circuito per l’encoder
ottico, led di posizione,2 viti da 2,6x8 mm.
In allegato, bustina di grasso lubrificante.
26/04/2006
37
Ruota dentata a denti ‘grossi’, vite da 2,6x8 mm, disco per l’encoder,
albero di movimento con ruota dentata, ruota dentata a denti ‘piccoli’,
puleggia, supporto per cavi, cinghia di trasmissione
03/05/2006
38
Supporto per l’albero di movimento, motore elettrico per il movimento
della ruota anteriore destra, 3 viti da 2,6x6 mm, 2 viti da 2,6x4 mm
In allegato, la seconda
scheda dei led degli occhi
10/05/2006
39
Coperchio
plastico per le pulegge e la cinghia, 3 viti da 3x10 mm
17/05/2006
40
2 coperchi laterali della ruota, parte inferiore della struttura della
ruota, parte superiore della struttura della ruota, asse metallico,
supporto cilindrico, ruota, vite con rondelle.
Cilindro per il movimento del bacino, pistone per il movimento del
bacino, molla
05/07/2006
44
Parte sinistra del supporto posteriore
12/07/2006
45
2 viti da 2,6x8 mm, elemento di connessione della ruota sinistra,
circuito per l’encoder ottico, led di posizione
19/07/2006
46
Ruota dentata a denti ‘grossi’, supporto per cavi, albero di movimento
con ruota dentata, puleggia, ruota dentata a denti ‘piccoli’, cinghia di
trasmissione, disco per l’encoder, vite da 2,6x8 mm.
26/07/2006
47
Motore
elettrico per il movimento della ruota anteriore sinistra, 3 viti da
2,6x8 mm, 2 viti da 2,6x4 mm, supporto per l’albero di movimento.
02/08/2006
48
Parte sinistra del bacino, cavo di
collegamento per il circuito dell’encoder, scheda per cavi di
collegamento, 3 viti da 3x10 mm, cavo di collegamento per il motore,
cavo di collegamento per i led.
09/08/2006
49
Coperchio in plastica, 3 viti da 3x10 mm.
16/08/2006
50
Scheda di connessione pc-b&v, cavo a tre fili
di connessione usb, cavo a sei fili di connessione rs232, 2 viti da
2.6x8 mm, cavo rs232 per pc, cavo usb per pc.
In allegato, il secondo cd-rom
23/08/2006
51
2 viti da 2,6x10 mm, cavo a dieci fili
blu, supporto per la telecamera, cilindro cavo per la telecamera, scheda
elettronica per la telecamera, cavo a otto fili blu.
30/08/2006
52
Scheda elettronica del modulo brain &
vision
06/09/2006
53
CMOS camera.
27/09/2006
Elenco dei
pezzi FASE 6
USCITA
PEZZI
DATA USCITA
54
Elemento esterno della ruota sinistra,
elemento interno della ruota sinistra.
4/10/2006
55
Pneumatico per ruota sinistra, 4 viti da 3x10 mm
11/10/2006
56
Elemento esterno della ruota
destra,
elemento interno della ruota destra.
18/10/2006
57
Pneumatico per ruota destra, 4 viti da 3x10 mm
25/10/2006
58
Parte posteriore del torso, supporto per cavi, 6 viti da 3x10mm
01/11/2006
59
Parte interna della scatola dello zaino, 4 viti da 3x8 mm, 6 viti da
2,6x8mm di tipo flangiato, 2 viti da 2,3x6 mm
08/11/2006
60
Scheda elettronica del modulo base
15/11/2006
61
Scheda con due emettitori e un ricevitore a ultrasuoni
parte
anteriore del braccio sinistro, coperchio della spalla sinistra, scheda
di interfaccia con il modulo arms, 7 viti da 2,6x6 mm, parte posteriore
del braccio sinistro, parte posteriore del supporto della spalla
sinistra, parte anteriore del supporto della spalla sinistra, scheda con
mini porta, cavo di collegamento con il modulo arms 4 viti da 3x10 mm.
17/1/2007
70
parte
interna dell’avambraccio sinistro, 2 rondelle, tappo del braccio
sinistro, parte esterna dell’avambraccio sinistro, albero filettato con
testa a croce, 2 viti da 3x10 mm, dado, 4 viti da 2,6x6 mm, 2 coperchi
per il giunto del gomito, sistema a due ghiere dentate per il giunto del
gomito, molla a spire fitte, molla a spire rade, supporto per il sistema
a pulsante, sistema a pulsante.
24/1/2007
71
prima
metà del connettore, seconda metà del connettore, 4 viti da 3x10 mm,
albero di metallo, parte sinistra del vassoio, parte destra del vassoio.
31/1/2007
72
parte
anteriore del braccio destro, cavo di collegamento con il modulo arms,
coperchio della spalla destra, parte posteriore del braccio destro, 4
viti da 3x10 mm,parte posteriore del supporto della spalla destra, 7
viti da 2,6x6 mm, scheda con mini porta, scheda di interfaccia con il
modulo arms, parte anteriore del supporto della spalla destra.
7/2/2007
73
parte
interna dell’avambraccio destro, tappo del braccio destro, 4 viti da
2,6x6 mm, albero filettato con testa a croce, 2 viti da 3x10 mm, parte
esterna dell’avambraccio destro, supporto per il sistema a pulsante,
sistema a pulsante, molla a spire rade, molla a spire fitte, dado,
sistema a due ghiere dentate per il giunto del gomito, 2 rondelle, 2
coperchi per il giunto del gomito.
14/2/2007
74
parte
sinistra della torcia, parte destra della torcia, led con cavo di
collegamento
21/2/2007
75
sportello del vano per le porte di comunicazione, 4 viti da 2,6x8 mm,
parte posteriore dello zaino, 4 supporti di aggancio.
3
gommini grossi, 2 metà del dito inferiore, 2 metà del dito centrale, 3
gommini piccoli, albero di metallo, 2 metà del dito superiore
7/3/2007
77
2 doppie
ruote piccole e medie, semiruota dentata, albero con ruota media e ruota
piccola, albero metallico con elementi dentati, doppia ruota media e
medio-piccola, doppia ruota media e piccola.
14/3/2007
78
motore
elettrico per la pinza
21/3/2007
79
parte
inferiore della struttura, 3 alberi in metallo, parte superiore della
struttura, 3 viti da 3x10mm, bustina di grasso lubrificante.
28/3/2007
80
parte
interna del gomito per la pinza, parte esterna del gomito per la pinza,
coperchio interno del gomito per la pinza, coperchio esterno del gomito
per la pinza.
4/4/2007
81
2
condensatori, 2 resistori da 100 ohm, 2 cappucci, 2 cilindri per i
cappucci, 2 resistori da 390 ohm..
11/4/2007
82
Due
trasmettitori a raggi infrarossi del kit per la breadboard.
18/4/2007
83
due
ricevitori a raggi infrarossi.
25/4/2007
84
Prima metà della scatola del telecomando, fascia protettiva, fascetta di
chiusura e apertura ‘a strappo’.
3/5/2007
85
Seconda
metà della scatola del telecomando
9/5/2007
86
Due viti
da 2,3x6 mm, coperchio della scatola.
16/5/2007
87
Cavo
tipo mini USB per il telecomando universale.
23/5/2007
88
Scheda con trasmettitore e ricevitore a raggi infrarossi.
30/5/2007
89
Scheda elettronica hand per la gestione della pinza.
6/6/2007
Elenco revisioni
07/08/2012
Aggiornato pagina, inserito
filmati da DVD di presentazione
25/08/2008
Aggiornato scheda tecnica
15/05/2007
Inserito descrizione fascicoli
da 83 a 89.
17/04/2007
Inserito descrizione fascicoli
da 76 a 82 inserito link Fase 9
14/03/2007
Inserito descrizione fascicoli
da 70 a 75
26/01/2007
Inserito descrizione fascicoli
da 66 a 69, inserito link Fase 8
19/01/2007
Inserito descrizione fascicoli
da 62 a 65, inserito link Fase 7
07/12/2006
Inserito descrizione fascicoli
da 55 a 61, inserito link Fase 6
12/09/2006
Inserito descrizione fascicoli
da 47 a 54, inserito link Fase 5
18/07/2006
Inserito descrizione fascicoli
da 42 a 46
23/06/2006
Aggiornato numero fasi
costruzione robot, rivista descrizione. Inserito descrizione fascicoli
da 38 a 41
01/06/2006
Inserito link Fase 4.
26/04/2006
Inserito descrizione fascicoli
da 27 a 37
06/03/2006
Inserito descrizione fascicoli
da 12 a 26, inserito link Fase 3