Presentazione
ultimo aggiornamento 10 settembre 2007
|
Presentazione ultimo aggiornamento 10 settembre 2007 |
|
|
|
|
“Pathfinder –
Il primo ROBOT….che attraverso la sua telecamera WEB si programma con smartcard intercambiabili”, edita da Peruzzo & C. |
|
| L'opera è suddivisa in 100 fascicoli,
sottoscrivendo l'abbonamento si ha in regalo la
scheda
PIC LABORATORY 87X, il suo costo è di
642 euro (6 bollettini da 107 euro). Ogni fascicolo è suddiviso in varie sezioni che sono: |
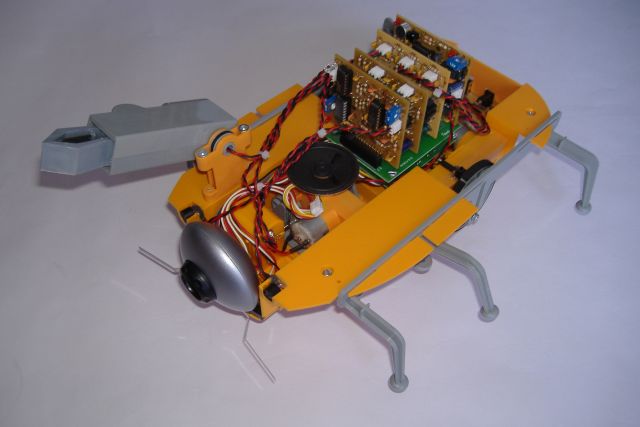
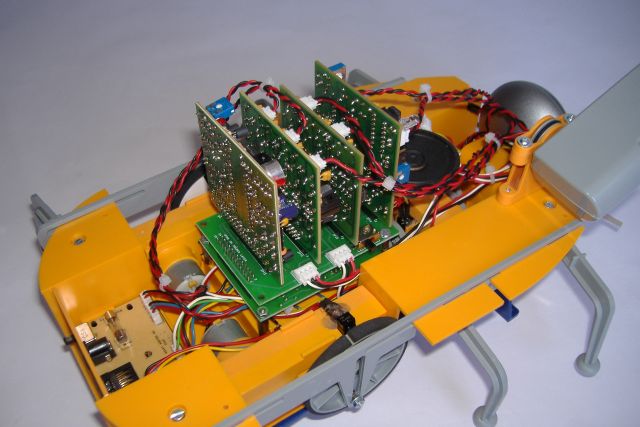
Robot Pathfinder
Montato
|
|---|

 |
La scheda
principale del robot Pathfinder è rappresentata dalla scheda di controllo,
su di esso è presente il chip PIC16F870 prodotto dalla MICROCHIP che
rappresenta il "cervello" del robot Questa scheda viene assemblata con i componenti allegati ai primi 8 fascicoli, mentre PIC16F870 è allegato al fascicolo 40. Sulla scheda è inoltre presente l'integrato MAX232 incaricato delle comunicazioni con il PC con esso otterremo di adattare i livelli di tensione TTL in uscita del microcontroller ai livelli di tensione più elevati che richiede la porta seria le del PC. Troviamo poi l'integrato 40106 e le resistenze che lo accompagnano che formano l'elettronica necessaria per il condizionamento dei sensori ottici modello CNY70, di cui è dotato il robot. |
![]()
 |
La scheda Bus dati
ha il compito di ricevere le schede: di potenza,
controllo del braccio,
scheda sensori,
scheda audio e di collegamento con i due sensori frontali "Bumper" Questa scheda viene assemblata con i componenti allegati ai fascicoli dal n° 9 al n° 12 |
![]()
|
|
La
scheda
smart-card ha il compito di alimentare il nostro robot in più sono presenti un connettore per il collegamento tra il robot e il PC tramite un connettore RJ45 e il connettore per Smart-card che permette di scaricare i programmi nel processore del robot. Sulla scheda è inoltre presente un connettore per il collegamento della telecamera Questa scheda viene assemblata con i componenti allegati ai fascicoli dal n° 13 al n° 16 |
![]()
 |
La
scheda di potenza ha il compito di pilotare i 3 motori del nostro robot. Questa scheda è fondamentale nel controllo di Pathfinder dato che in essa è contenuto tutto il sistema elettronico di amplificazione e potenza per i motori incaricati del movimento del robot, sia con le ruote che con le zampe. Questa scheda viene assemblata con i componenti allegati ai fascicoli dal n° 19 al n° 27 |
![]()
|
|
La
scheda di programmazione qui mostrata permette la programmazione della smart card e del PIC del robot. Per il montaggio sono necessari i componenti allegati ai fascicoli dal n°35 al n°40. |
![]()
|
|
La
scheda sensori qui mostrata racchiude i circuiti
per il funzionamento di due tipi di sensori: il primo è formato da una
coppia di capsule ultrasoniche (una trasmittente e una ricevente) che
formano il sensore ad ultrasuoni, il secondo formato da un fototransistor
rappresenta il sensore di luce. Per il montaggio sono necessari i componenti allegati ai fascicoli dal n° 56 al n°65. |
![]()
|
|
Questa
scheda I/O non fa
parte del robot ma serve unicamente come scheda sperimentale, su di essa
sono presenti: - n° 8 led e n° 1 display per visualizzare numeri o stati logici - n° 4 trimmer per simulare tensioni variabili - n° 6 interruttori per simulare stati logici 0 1. - n° 2 pulsanti - un circuito per il pilotaggio di un' altoparlante è inoltre presente un connettore dove sono presenti tutte le porte presento sul PIC della scheda madre. Per il suo montaggio sono necessari i componenti allegati ai fascicoli dal n° 45 al n° 51 |
![]()
|
|
La
scheda audio è in pratica un
registratore digitale, il circuito integrato principale infatti permette la
registrazione e riproduzione di un un brano registrato tramite il microfono
che è presente sulla basetta. Sulla scheda è inoltre presente un sensore di raggi infrarossi pilotabile da un qualsiasi telecomando, per il pilotaggio dell'altoparlante è presente un' apposito integrato LM386 che è un' amplificatore audio a basso voltaggio. La registrazione del brano viene effettuata in manuale tramite la pressione del tasto SW2, mentre la riproduzione del brano registrato può avvenire sia in manuale tramite la pressione del tasto SW1 sia tramite un comando impartito dal processore del robot. Questa scheda viene assemblata con i componenti allegati ai fascicoli dal n° 67 al n° 77. |
![]()
Scheda di controllo del braccio e della pinza
|
|
La
scheda di controllo del
braccio e della pinza permette
il controllo e la gestione dei motori per la salita e discesa del braccio ed
inoltre per l'apertura e chiusura della pinza. Questa è in comunicazione con la scheda di controllo principale del microcontroller ma possiede in microcontroller PIC12C508 che ha il compito di controllare i movimenti della pinza in modo temporizzato. Sulla scheda è presente un Jumper con il quale potremmo stabilire se controllare la pinza con il processore principale o con quello secondario. Il circuito di pilotaggio si basa su un ponte da H basato su transistor in configurazione Darlington (analogo sistema a quello della scheda di potenza). Questa scheda viene assemblata con i componenti allegati ai fascicoli dal n° 81 al n° 87. |
![]()
Collegamento di Pathfinder al PC
|
|
Quello visibile
nella foto è il cavo che permette di collegare il robot e il PC, rappresenta
in pratica un cordone ombelicale. Dal lato PC sono presenti 3 tipi di connettori: uno va collegato alla presa seriale (a 9 PIN), uno va collegato alla presa USB (collegato alla telecamera presente sul robot), il terzo connettore va collegato alla scheda audio (audio IN) ed è collegato al microfono presente sulla scheda audio. Dal lato robot è presente un connettore RJ45 che va collegato alla scheda Smartcard. Il cavo viene fornito allegato al fascicolo n° 93. |
![]()
|
|
Nel corso del
completamento dell'opera vengono forniti i componenti che vanno a formare il
corpo del robot. Fanno parte della fornitura oltre al corpo principale, le ruote, i motori, la copertura, il braccio e altre parti. |
![]()
|
|
La
videocamera darà la vista al nostro robot, si tratta di un prodotto della Labtec
denominata
Labtec® webcam. Per l'installazione sul robot si deve sostituire il cavo in dotazione con un altro che permette il collegamento della telecamera stessa con la scheda smartcard e da cui tramite un' apposito cavo al PC. Con la telecamera è fornito un CD contenente il programma di gestione. |
![]()
|
|
Durante il corso dell'opera (fascicoli 1 e 53) vengono forniti 2 CD contenenti i programmi per comandare il robot, questi comprendono inoltre dei filmati e degli esercizi per imparare a programmare. |
![]()
|
PIC LABORATORY sistema di sviluppo per PIC16F87X |
| Per quanti
sottoscrivono l'abbonamento è previsto l'invio in regalo di una valigetta contenente il
PIC
LABORATORY 87X che è un sistema di sviluppo che collegato al computer, permette di
programmare e testare i programmi realizzati per i microcontroller della serie PIC16F87X. Dispone di un connettore Smart card e incorpora una scheda di memoria Memory Card in cui registrare e leggere programmi. Per altre informazioni vedere la sezione programmatori PIC. |
|
|
| Elenco revisioni | |
| 10/09/2007 | Inserito LINK alla sezione Robotica industriale, Laboratorio pratico, Come programmare, Il mondo della microrobotica, Il robot e il suo ambiente, progetto di programmi. |
| 09/07/2007 | Inserito LINK alla sezione Costruzione di Pathfinder |
| 21/06/2007 | Inserito elenco sezioni dell'opera con LINK alla sezione Dispositivi elettronici e Computer e Microcomputer |
| 09/02/2007 | Aggiornato pagina con inserimento foto del montaggio |
| 06/12/2005 | Aggiunto link alle pagine di descrizione delle varie schede. |
| 27/06/2005 | Aggiornamento della pagina principale di presentazione del robot con una spiegazione delle singole parti che lo formano. |
| 02/04/2004 | Emissione preliminare |