
ultimo aggiornamento 3 settembre 2014
|
ultimo aggiornamento 3 settembre 2014 |
|
|
|
|
Tracciamo brevemente la
storia delle pubblicazioni editoriali che dalla fine del 2001 ad oggi hanno
permesso agli appassionati di elettronica e di robotica di avvicinarsi a
questo affascinante mondo. |
|

| Link alle pagine interne del sito per maggiori informazioni | ||||||||
 |
 |
 |
 |
 |
|
 |
 |
 |
| Monty | Panettone | Cybot | Pathfinder | I-Droid 01 | Rover Sojourner | Robonox | RoboZak | Robi |
|
|
 |
|
|
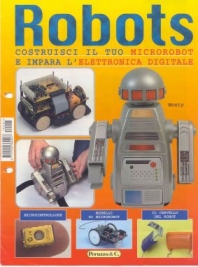
Era il mese di settembre del 2001, quando nelle edicole, confuso con tutte le altre pubblicazioni, appariva, ad opera dell’editore Peruzzo & C., il primo fascicolo di “Robots – Costruisci il tuo primo microrobot”.
L’opera, composta di 60 fascicoli (costo con uscita settimanale 6,15
euro), prevedeva, oltre al fascicolo, degli allegati formati di volta in
volta da componenti elettronici, circuiti stampati, particolari
metallici e plastici, motori elettrici, ecc.
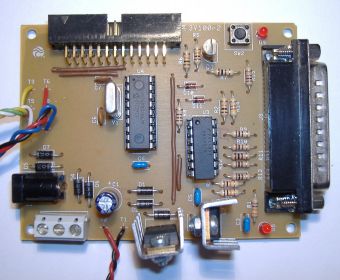
Scheda in/out: utilizzata per l’apprendimento della programmazione. Monty |
|
|
 |
|
|
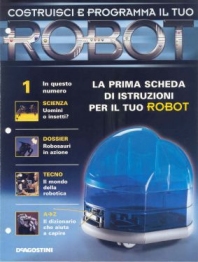
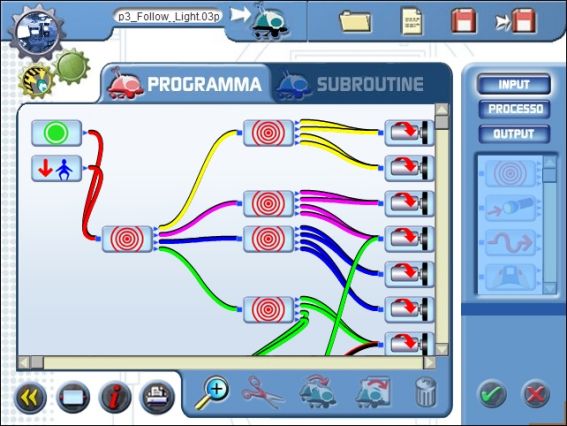
Nel mese di dicembre del 2001 sugli schermi televisivi si vedevano le immagini di uno strano oggetto, simili ad un panettone blu, che si muoveva seguendo una fonte di luce .
Erano le prime avvisaglie della nascita dell’opera
“COSTRUISCI E
PROGRAMMA IL TUO ROBOT”
Su di essa trovavano posto anche i sensori di contatto e infrarossi
frontali, pilotava i servomotori per il moto. |
|
|
 |
|
|
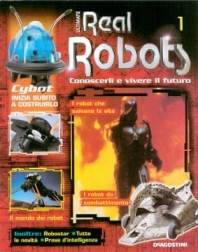
E’ il luglio 2003 quando la DeAgostini propone il suo nuovo robot, il suo nome è Cybot
Il nome originale dell’opera era “Ultimate Real Robot”. Edita
originariamente dalla Eaglemoss International ltd. nel 2001 in
Inghilterra, ma pubblicata anche in Olanda, Australia, Nuova Zelanda,
Francia , Sud Africa, Singapore, Germania, Giappone, Malesia, Malta.
Fase 3: durante questa fase veniva dotato il robot dei dispositivi di
riconoscimento vocale, cosa che permetteva di impartire semplici ordini
tramite un microfono posto su una speciale cuffia.
Fase 4: Con alcuni dispositivi speciali, il robot era trasformato in un giocatore di calcio.
Cybot gioca a calcio
Descrizione
Queste erano montate parte all’interno del robot, altre nel telecomando,
nella cuffia e in altri componenti.
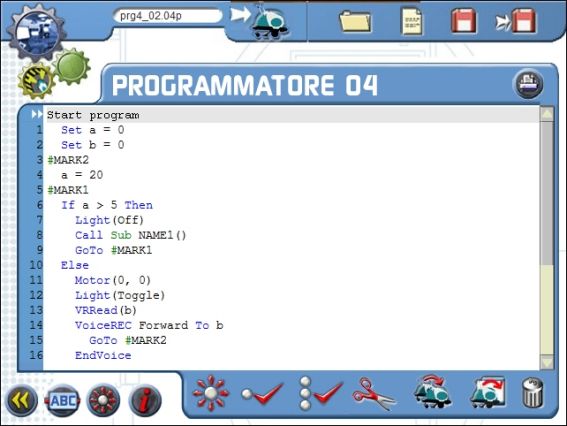
Programmatore testuale – a differenza di quello a blocchi in questo caso si utilizzava un linguaggio di programmazione testuale.
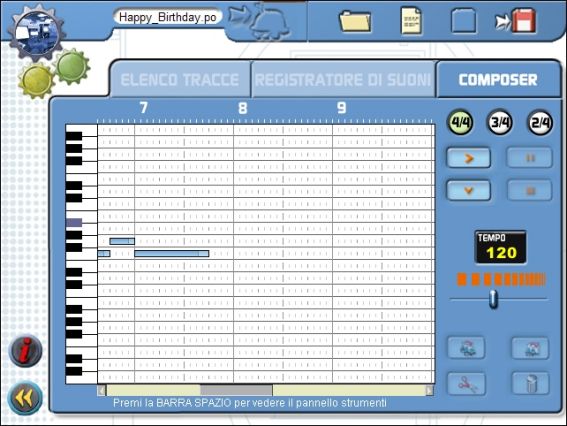
Media Lab – consisteva in un registratore di suoni con la possibilità di modifica della traccia acquisita, e di un composer per la creazione di tracce musicali, il tutto con la possibilità di gestione dei file creati che potevano essere trasferiti sulla memoria flash presente sul robot e ascoltati tramite il suo altoparlante
Simulatore – attraverso questo programma era possibile simulare e testare in modo virtuale i propri programmi prima di trasferirli sul robot.
|
|
|
 |
|
|
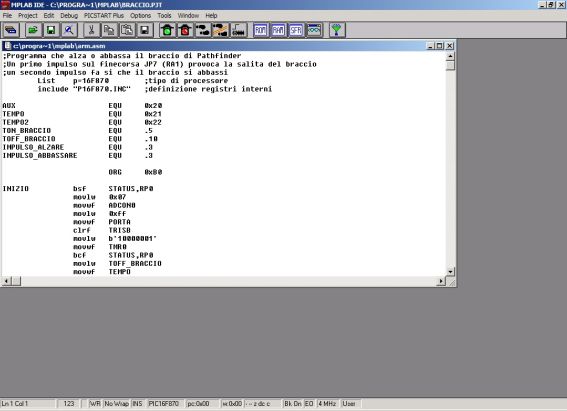
Chi, nel gennaio 2003, era ancora indaffarato nella costruzione o nel perfezionamento di uno dei precedenti robot, si trovò davanti ad una nuova sfida: “Pathfinder – Il primo ROBOT….che attraverso la sua telecamera WEB si programma con smartcard intercambiabili”, edita da Peruzzo & C.
L’opera, era composta da 100 fascicoli, al costo di 6,50 euro.
Scheda interfaccia: su di essa erano presenti sia i connettori per
l’installazione delle schede del robot sia di quello per il collegamento
alla scheda di controllo.
|
|
|
 |
|
|
Siamo nell’agosto del 2005 (I edizione, agosto 2006 II edizione), dopo quasi tre anni di pausa esce nelle edicole una nuova opera di robotica.
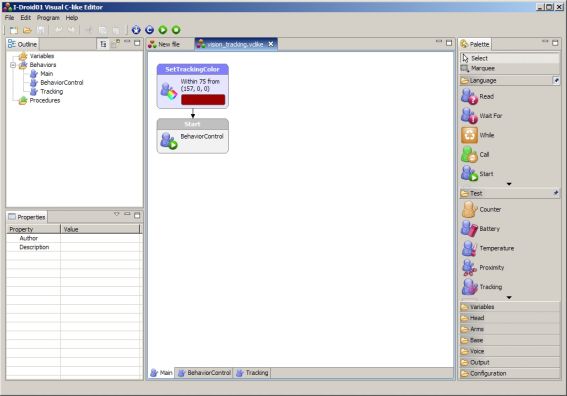
Questa, edita nuovamente dalla DeAgostini, si chiama “I-Droid 01 – Costruisci il tuo personal robot – Vede, sente, parla, si muove come vuoi tu” e prevede 75 fascicoli con un costo di 8,90 euro. L’opera è anche pubblicata in Polonia, Giappone e Spagna.
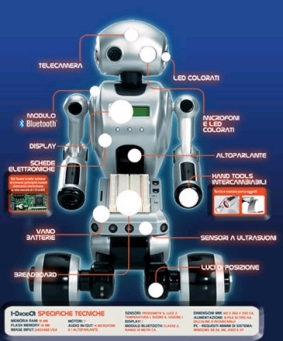
Il robot è molto diverso da quelli apparsi sino ad oggi nel panorama
robotico.
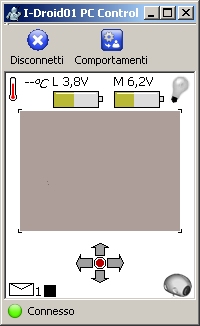
Controllo tramite PC Controllo con telefonino
E’ stato progettato e realizzato dalla RoboTech, una società fondata da
due membri dell'Advanced Robotics Technology and Systems Laboratory (ARTS
Lab) della Scuola Superiore Sant'Anna di Pisa.
Head controller: per i movimenti della testa e il controllo del Sound Follower, led di ‘occhi’ e ‘orecchie’ e sensore di sfioramento utilizza
un processore MC68HC908AP8 della Freescale
I-Droid 01 |
|
|
 |
|
|
Siamo nell’agosto del 2006 quando la Peruzzo & C. torna nelle edicole
con un nuovo robot, il nome dell’opera è “Costruisci il Rover Sojurner –
Il veicolo spaziale radiocomandato inviato si Marte dalla NASA”, essa
prevede ben 100 fascicoli.
L'opera però viene interrotta da parte
dell'editore al numero 27 e non portata a termine.
Sojourner |
|
|
 |
|
|
Siamo così arrivati al mese di gennaio del 2007 quando una nuova casa editrice e un nuovo robot entrano nel panorama della robotica.
L’opera edita dalla casa editrice “Giorgi Editore”, si intitola “Robonox
– Costruisci e programma il tuo robot – Cammina –Esegue acrobazie –
Combatte”.
Programmazione |
|
|
|
|
|
Siamo a Luglio del 2007 quando la DeAgostini mette in vendita la sua versione di robot umanoide
realizzato dall’azienda coreana Hitec su misura per la DeAgostini, RoboZak è una versione particolare del celebre robot umanoide Robonova, dal quale si differenzia nei seguenti punti:
RoboZak è costituito da 18
servomotori digitali Hitec che supportano la
programmazione 'catch & play', ovvero l'acqusizione diretta delle
posizioni. Il robot è controllato dalla
scheda MR-C3024 con processore ATMEL ATMega 128L a 7.4MHz che può gestire fino a 24 servomotori
contemporaneamente. |
 |
Scheda tecnica del Robot
RoboZak
|
|---|
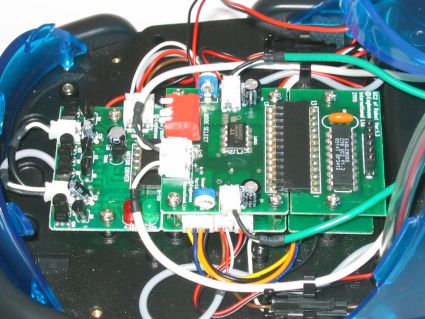
Foto della scheda di controllo del robot
|
Fasi di assemblaggio L'assemblaggio prevede la costruzioni di sistemi differenti che si evolvono progressivamente fino ad ottenere il RoboZak in versione umanoide.
|
|---|
|
Informazioni sull'opera
|
|---|
Robozak
Sito ufficiale:
http://www.robozak.deagostini.it/frontend/ (non più attivo)
Forum ufficiale:
http://forumrobozak.deagostini.it/active.asp (non più attivo)
|
|
|
|
Dal 16 gennaio
2014 è in vendita presso le edicole e su
Amazon.it l'opera la cui vendita on-line era già iniziata l'11
novembre 2013.
In tutto, sono in programma 70 uscite (Fascicoli) con periodicità bisettimanale dal numero 1
al 16 e successivamente settimanale. La prima uscita è fissata al prezzo lancio
di 7,99 euro. Tutte le altre a 19,99 ad eccezione di 4 numeri contenenti la
scheda CPU, i sensori degli occhi e il PCB di riconoscimento vocale che avranno
un prezzo di 24,99 euro.
Il
robot Robi è l'ultimo nato della
De Agostini,
prima di lui erano usciti nelle edicole il
robot "Panettone" poi è stata la
volta di Cybot, successivamente l'uscita di
ID 01, e per ultimo l'umanoide
RoboZak.
Robi è una creatura di
Tomotaka Takahashi, creatore di robot di fama
mondiale, è riconosciuto per il suo design raffinato, è lui che ha progettato e
disegnato il robot per quest'opera.
Un robot che con i suoi movimenti e le sue doti di conversazione ci affascina e
rasserena allo stesso tempo.
Scheda tecnica del Robot Robi non ufficiale
| Dimensioni | Altezza 34 cm, Larghezza 16 cm, Spessore 12 cm |
| Peso: | 1 kg (circa, con batterie) |
| Elettronica: | Scheda test servo (Futaba): CPU MSP430G2333 prodotto dalla Texas Instrument |
| Scheda di controllo (VStone): CPU ARM 32F205rbt6 prodotto dalla ST | |
| Power distruibution board (VStone): | |
| Mouth LED board | |
| Scheda riconoscimento vocale (RayTron Inc): CPU ?? | |
| Remocon Board (RayTron Inc): CPU ?? | |
| Mic&Remocon LED Board (RayTron Inc) | |
| Altoparlante | 8 ohm - 1W ?? |
| Gradi di libertà | 20 rotazionali |
| Servomotori: | 20 servomotori (Futaba): tipo RS308MD |
| Sensori: | Accelerometro triassiale (su scheda controllo) |
| 2 Eye sensor (Vstone): | |
| Composizione del telaio: | Plastica |
| Alimentazione: | Pacco batterie Li-ion: tensione d'uscita è di 7,4V ad una corrente di 800 mA/h |
| Caricabatterie | Caricabatteria: Ingresso: 100-240V AC - Uscita 8,4V DC - 800 mA, oppure tramite la BATTERY DOCKING STATION |
| Tipologia di controllo: | Nessuna, programma residente su microSD |
| Programmazione: | Programma test servo (non fornito da DeAgostini) |
| Accessori: speciali | Sedia caricabatterie |
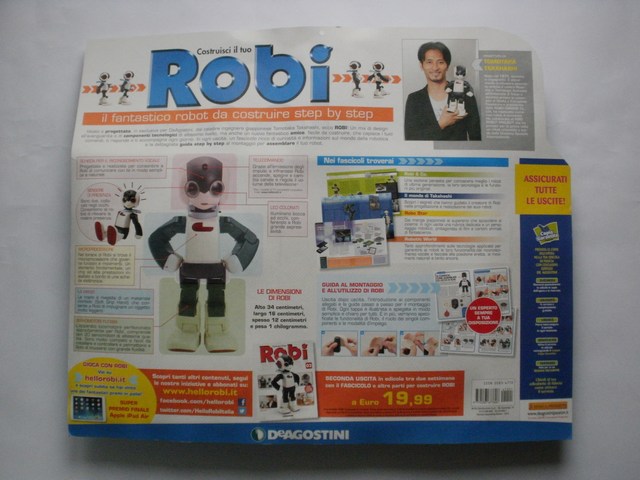
Foto del primo fascicolo venduto in edicola
|
||||||||||||
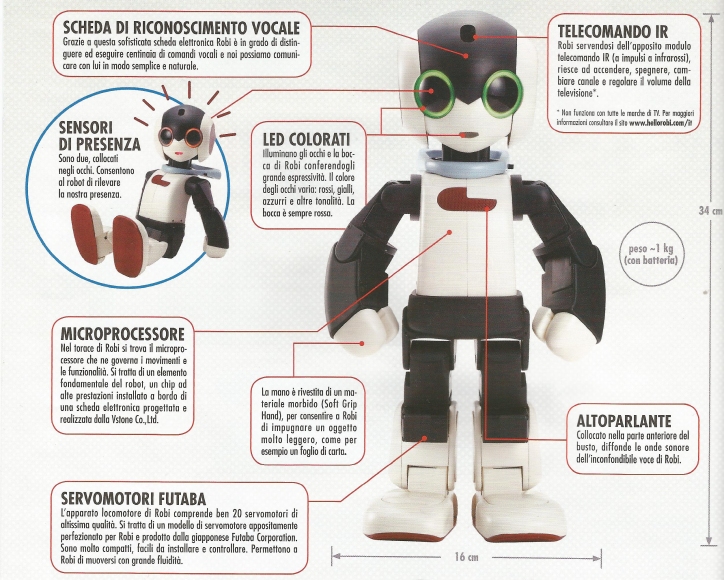
Foto tratta dalla Guida dell'opera allegata al primo fascicolo in vendita in edicola
 Tomotaka Takahashi con Robi |
 |
Le prime parole di Robi
|
Robi ha un aspetto amichevole e tenero, misura 30 cm per un peso complessivo di
1kg. Riesce a comprendere oltre 250 comandi, si siede, cammina, balla, accende
la tv come un telecomando, risponde ogni volta che viene chiamato il suo nome e
quando qualcuno rientra a casa gli dà il benvenuto. Per ulteriori informazioni vedere il sito a lui dedicato. |
|
 |
 |
| Elenco revisioni | |
| 03/09/2014 | Aggiornato pagina, inserito robot Robi |
| 10/06/2008 | Emissione preliminare |